1、内容简介
略272
2、内容说明
半主动悬挂控制是提高高速列车横向平稳性有效的方法
。
然而
,
车辆动力学模型的复杂性
,
用复杂模型 设计出的控制器也是复杂的, 且需要多个传感器对多个物理量进行检测
,
使其很难在实际车辆中应用
。
针对这一问题
,
提 出一种有利于控制算法设计,
又能反映车辆横向振动主要特点的
3
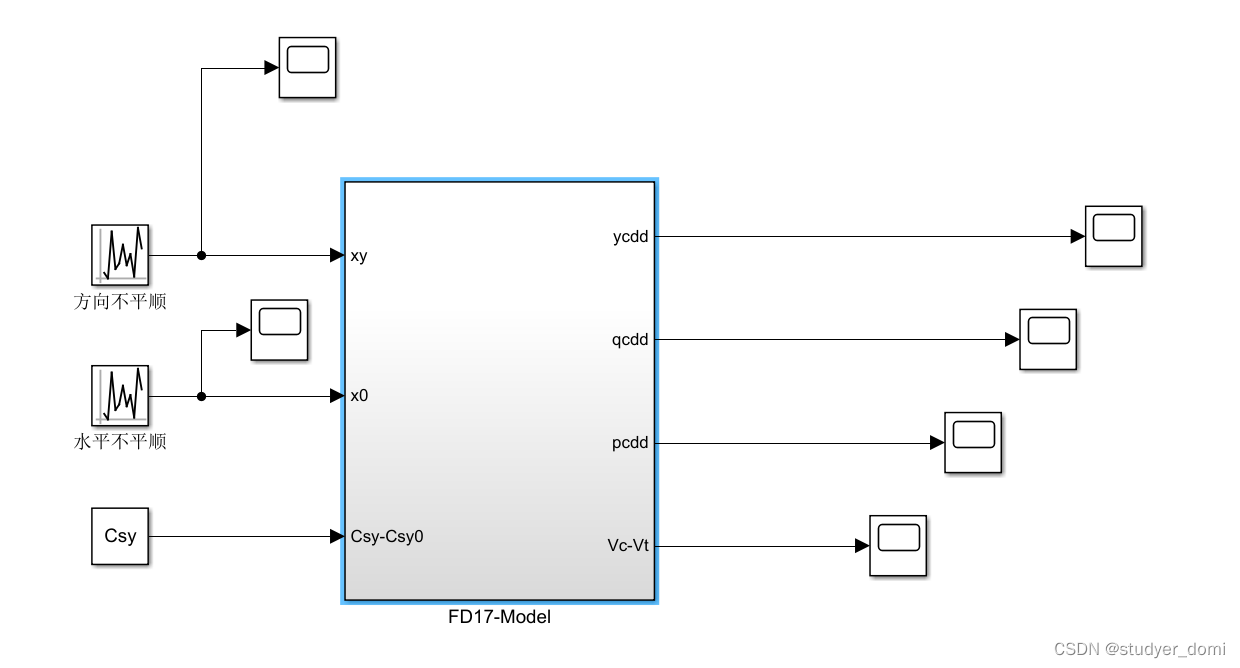
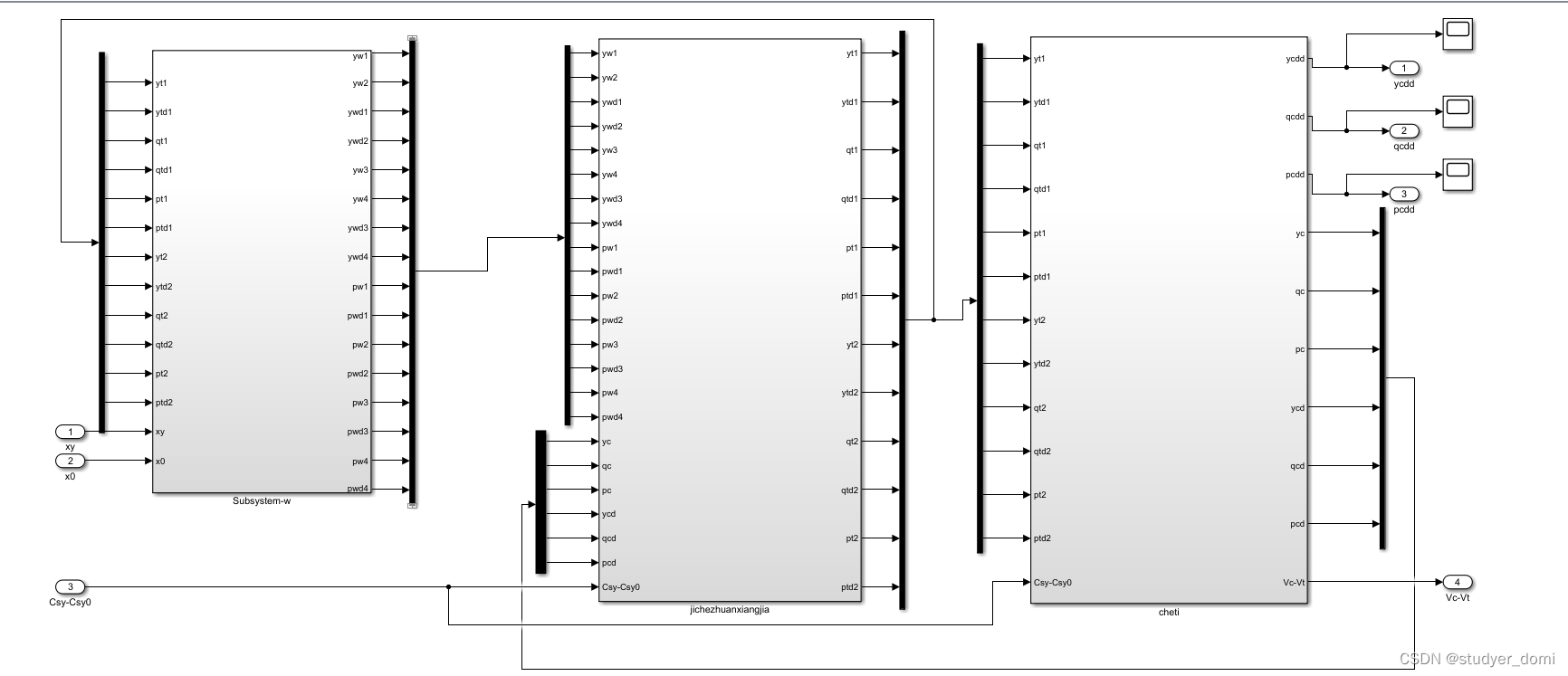
自由度简化模型和利于控制算法性能研究仿真的
17 自由度模型,
用
3
自由度模型设计自适应预测控制算法
,
用
17
自由度模型进行仿真验证
,
有效解决了模型与控制的矛盾 问题。
高速列车的横向平稳性恶化
, 主要是由于轨道的 水平不顺和方向不平顺引起四个轮对横移和摇头
、前 后转向架和车体的横移
、
侧滚和摇头运动引起的
。
半 主动悬挂控制是提高车辆平稳性行之有效方法[
1, 2
] 。 在半主动悬挂控制算法设计过程中, 需要建立车辆的 模型
。
因为对象模型是分析系统
、
预测输出和设计控 制算法的有力工具, “
控制
”
和
“
模型
”
就象一对
“
孪生
” 兄弟,
受控制系统的数学模型总是研究控制系统的出发点或归宿[
3
]
。
然而
,
轮轨存在非线性耦合
,
轮对
、
构 架和车体之间存在多自由度的复杂振动,
难于建立车 辆横向动力学精确模型,
即使能建立出精确模型
,
其模 型也是高阶 、
多变量和非线性的
。
而控制器的复杂度取决于被控对象的模型的复杂程度,
用这种复杂的 模型所设计出的控制器也较复杂,
且要求传感器检测 的物理量较多,
很难在实际中应用
[
4
] 。 用于设计横向半主动悬挂控制器的车辆横向模型 与车辆横向动力学模型是可以有一定区别的
。车辆动 力学模型一般要考虑轮轨非线性蠕滑力
、车体的弹性 模态
、
钢轨的弹性
、
轮对的扰动等因素
;而车体横向半 主动悬挂控制模型则可不必考虑这些因素
,
可使受对象模型大简化 。
简化受控对象模型有利于优化设控制算法,
但用该简化模型进行控制算法仿真分析结 果与实际控制系统运行情况相差较大, 甚至相反的结 论
。
即控制系统的仿真结果
, 不能正确评价实际控制 系统的性能
。而系统的复杂模型需较能反应系统的真 实情况
,却难于利用它设计出有实际应用价值的控制 器
。
为解决这一矛盾
,
论文分别建立出轨道随机不平
3、仿真分析
4、参考论文
www.cn-ki.net_高速列车横向主动、半主动悬挂控制研究.pdf
列车横向半主动悬挂自适应控制方法研究_金光大.caj
高速列车横向半主动悬挂系统建模研究及分析_陈春俊 (1).pdf