1、内容简介
单球机器人动力学与控制研究
326-可以交流、咨询、答疑
2、内容说明
单球机器人是一种本征不稳定的动平衡机器人,它与地面单点接触,运动灵活,同时具有多变量、高度非线性、时变等特点,近年来成为轮式机器人领域研究的热点。相对于传统轮式机器人而言,单球机器人转弯半径几乎为零,可以在任何时候转向任意方向,同时在机械结构上的纤细苗条的特点使得该机器人能够在狭窄的空间工作,因而具有广泛的应用前景。本文旨在研究单球机器人动力学与控制模型,为最终实现机器人的平稳的自主移动奠定基础。通过对单球机器人的运动规律进行研究,将该机器人的运动分解到惯性坐标系三个平面,并在这三个平面分别对机器人的动能和势能进行数学建模,再根据拉格朗日方程建立机器人的动力学模型。在平衡点附近对机器人的非线性数学模型进行线性化,得出对应的状态方程,在此基础上对系统进行能控性和能观性分析。对机器人的平衡控制的研究,本文提出LQR结合PID的控制算法模型,对机器人的XOZ和YOZ平面采用LQR最优控制算法,而将PID控制算法应用到机器人的XOY平面,在Matlab-Simulink软件平台上对机器人系统平面模型的状态方程进行控制算法效果研究。达到满意的控制效果后,采用Matlab-Simulink软件和Adams软件进行联合仿真实验,经过反复多次的参数调整,结果显示所设计的控制器对于高阶非线性单球机器人系统的控制能够达到理想的效果
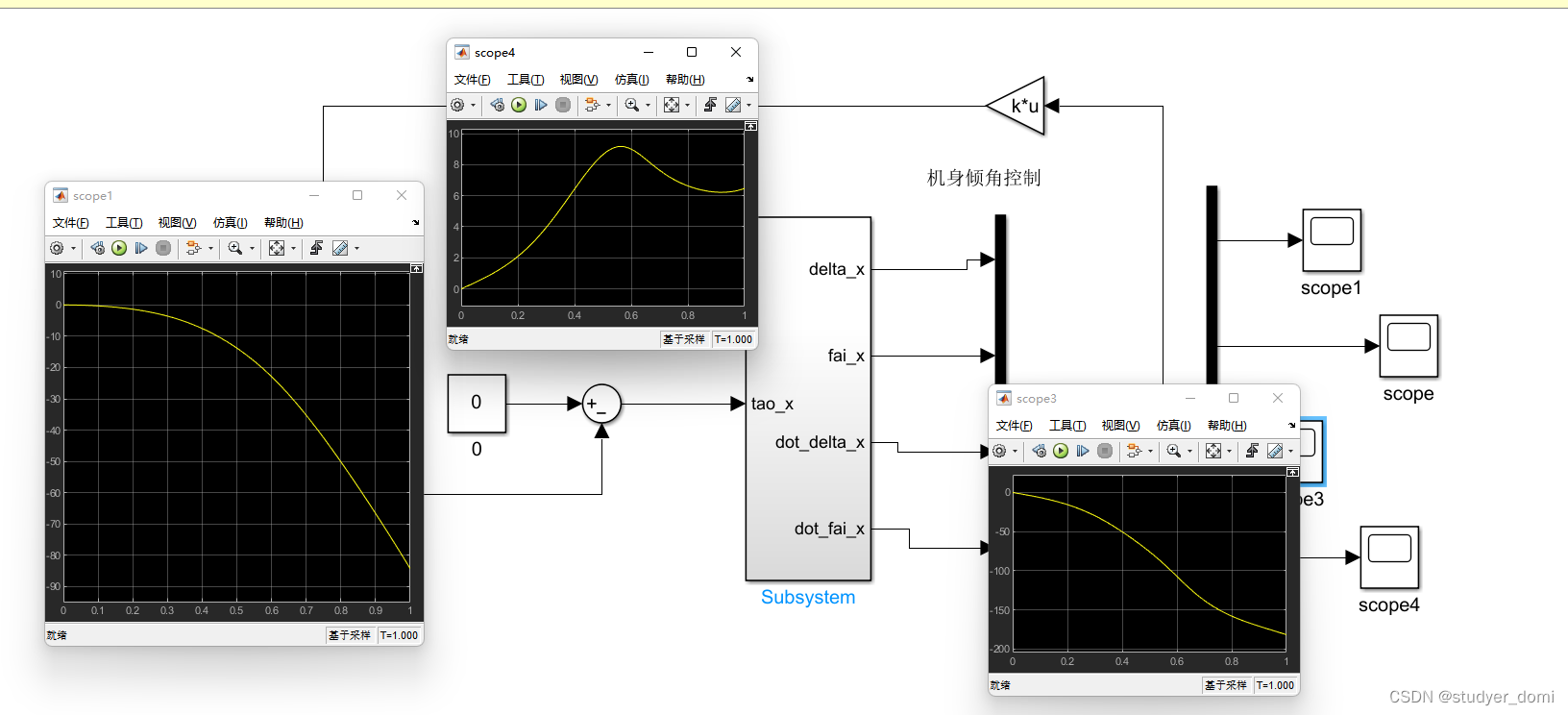
3、仿真分析
4、参考论文
单球机器人动力学与控制研究_周彭滔.caj