1.软件版本
matlab2017b
2.核心源码
function func_power_gen_machine(HHup,R_buoy,seepart,seeall);
if seepart == 0 & seeall == 1
%先产生固定部分
%第一:海底的圆柱体
t = 0:pi/20:2*pi;
RR = 100;
HH = -6.5;
x= 600+RR*sin(t);
y= 300+RR*cos(t)/2;
z=linspace(-8,HH,length(t));
X=meshgrid(x);
Y=meshgrid(y);
Z=[meshgrid(z)]';
surf(X,Y,Z);
xlabel('x'),ylabel('y'),zlabel('z')
shading interp;
colormap([255/255,100/255,103/255]);
hold on
clear X Y Z
%第二:上半部分的柱体
t = 0:pi/20:2*pi;
RR2 = 60;
HH2 = -6;
x= 600+RR2*sin(t);
y= 300+RR2*cos(t)/2;
z=linspace(-8,HH2,length(t));
X=meshgrid(x);
Y=meshgrid(y);
Z=[meshgrid(z)]';
surf(X,Y,Z);
xlabel('x'),ylabel('y'),zlabel('z')
shading interp;
colormap([255/255,100/255,103/255]);
hold on
clear X Y Z
%第三:线圈
HH3 = -8:0.5:-3;
for i = 1:floor(length(HH3)/2)
t = 0:pi/20:2*pi;
RR3 = 10;
x= 600+RR3*sin(t);
y= 300+RR3*cos(t)/2;
z=linspace(HH3(2*i-1),HH3(2*i),length(t));
X=meshgrid(x);
Y=meshgrid(y);
Z=[meshgrid(z)]';
plot3(X,Y,Z,'b');
xlabel('x'),ylabel('y'),zlabel('z')
shading interp;
colormap([255/255,100/255,103/255]);
hold on;
end
alpha(0.5);
clear X Y Z
HHup = HHup + 0.1;
%第四:滑动活塞
t = 0:pi/20:2*pi;
RR2 = 15;
x= 600+RR2*sin(t);
y= 300+RR2*cos(t)/2;
z=linspace(-6+HHup,-5+HHup,length(t));
X=meshgrid(x);
Y=meshgrid(y);
Z=[meshgrid(z)]';
surf(X,Y,Z);
xlabel('x'),ylabel('y'),zlabel('z')
shading interp;
colormap([255/255,100/255,103/255]);
hold on
alpha(0.5);
clear X Y Z
%第五:连接引线
t = 0:pi/20:2*pi;
RR2 = 0.01;
x= 600+RR2*sin(t);
y= 300+RR2*cos(t)/2;
z=linspace(-5+HHup,0+HHup,length(t));
X=meshgrid(x);
Y=meshgrid(y);
Z=[meshgrid(z)]';
plot3(X,Y,Z,'k');
xlabel('x'),ylabel('y'),zlabel('z')
shading interp;
colormap([255/255,100/255,103/255]);
hold on
alpha(0.5);
clear X Y Z
%第六:水面浮标,球形
t=linspace(0,pi,25);
p=linspace(0,2*pi,25);
[theta,phi]=meshgrid(t,p);
x= 600+R_buoy*sin(theta).*sin(phi);
y= 300+R_buoy*sin(theta).*cos(phi)/2;
z=R_buoy*cos(theta)/28 + HHup;
surf(x,y,z);
shading interp;
colormap([255/255,100/255,103/255]);
hold on
alpha(0.5);
alpha(0.5);
end
if seepart == 1 & seeall == 0
%第六:水面浮标,球形
t=linspace(0,pi,25);
p=linspace(0,2*pi,25);
[theta,phi]=meshgrid(t,p);
x= 600+R_buoy*sin(theta).*sin(phi);
y= 300+R_buoy*sin(theta).*cos(phi)/2;
z=R_buoy*cos(theta)/28 + HHup;
surf(x,y,z);
shading interp;
colormap([255/255,100/255,103/255]);
hold on
alpha(0.5);
alpha(0.5);
end 3.测试结果
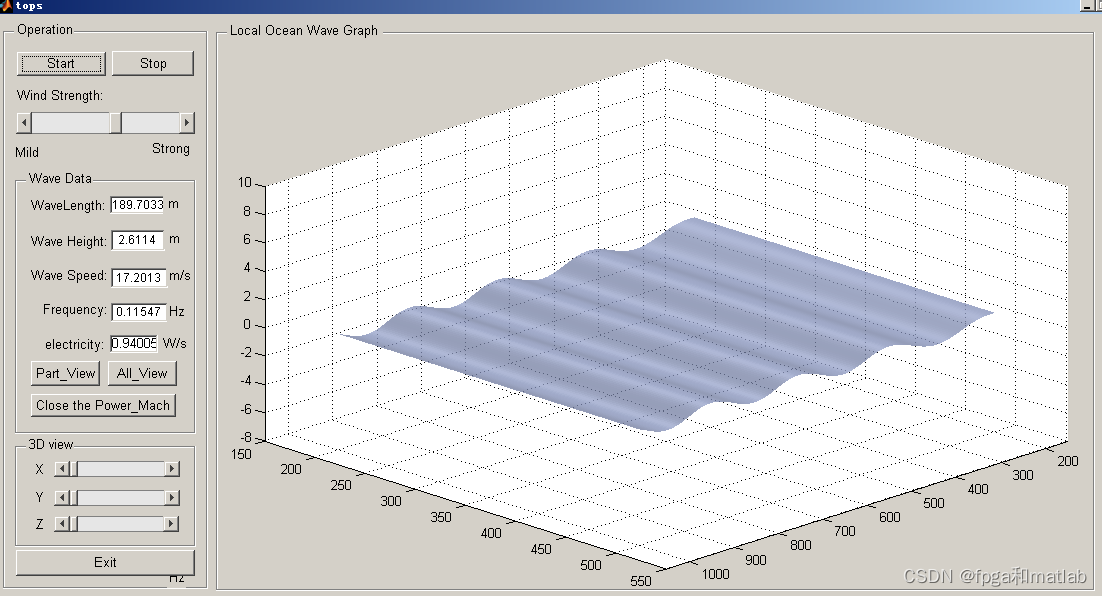
在上一次的成果基础之上【海浪建模1】,加入了海浪发电机的动态效果,以及简单的计算一下发电量。根据设计要求,整个发电机之后,仿真的效果如下所示:

从这里可以看到,控制界面做了下调整,增加了三个按键,其中,part_View是海面浮标的动态效果,All_View是整个发电机的动态效果,Close the power mach则是关闭发电机的动态效果,仅仅显示海浪的效果,electricity则是显示发电量的效果。整个系统仿真结果如下所示:
最初的海浪建模:
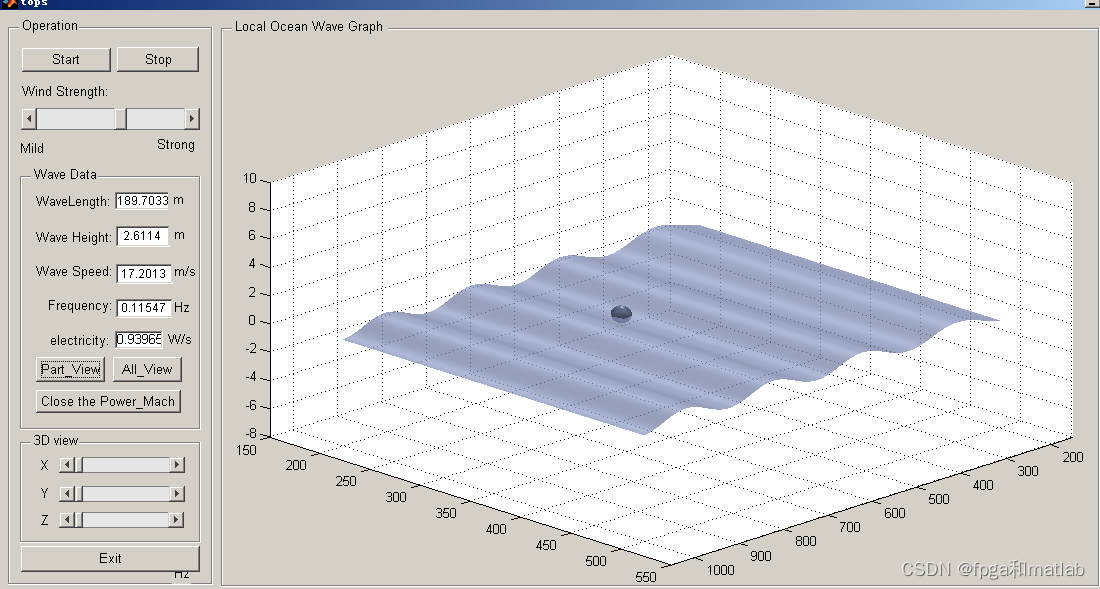
点击Part_View按键:
调整视角滑动条,如下的效果:

点击All_View按键:

调整视角滑动条,如下的效果:
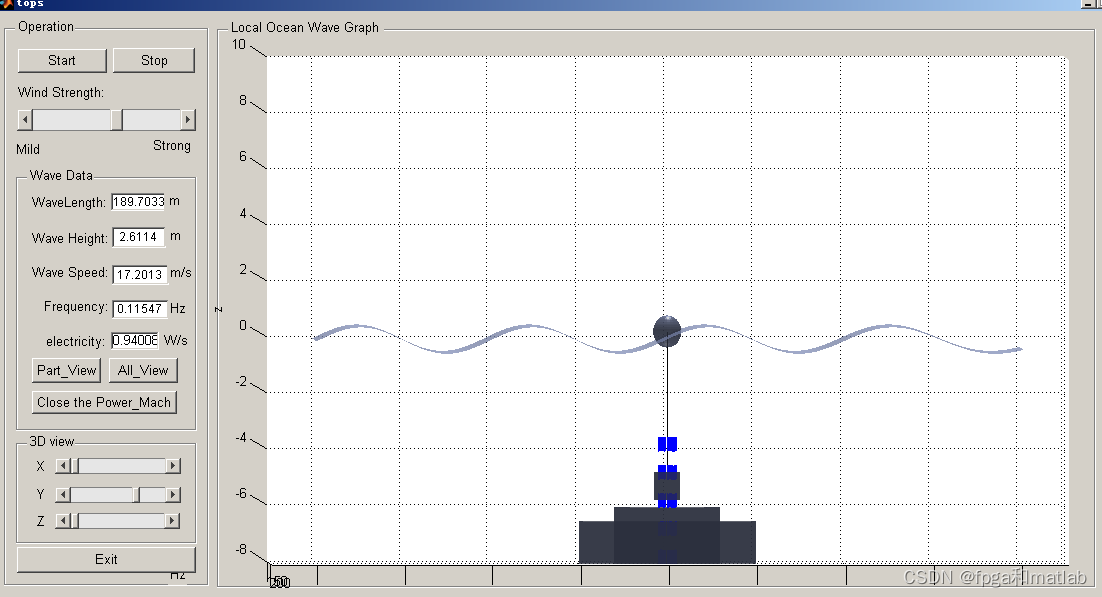
点击Close the power Mach按键:

A19-07