1.OpenCV图像的基本变换
1.1 图像的放大与缩小
-
resize(src, dsize[, dst[, fx[, fy[, interpolation]]]])
- src: 要缩放的图片
- dsize: 缩放之后的图片大小, 元组和列表表示均可.
- dst: 可选参数, 缩放之后的输出图片
- fx, fy: x轴和y轴的缩放比, 即宽度和高度的缩放比.
- interpolation: 插值算法, 主要有以下几种:
- INTER_NEAREST, 邻近插值, 速度快, 效果差.
- INTER_LINEAR, 双线性插值, 使用原图中的4个点进行插值. 默认.
- INTER_CUBIC, 三次插值, 原图中的16个点.
- INTER_AREA, 区域插值, 效果最好, 计算时间最长.
#缩放狗的图片大小
dog=cv2.imread('./file_1636622671261/code/dog.jpeg')
#方式一:按照像素缩放 interpolation 可以指定算法 防止图片失真(一定会存在失真)
# dog=cv2.resize(dog,(800,800),interpolation=cv2.INTER_BITS)
#方式二:按照 x,y轴比例进行缩放
dog=cv2.resize(dog,dsize=None,fx=3.5,fy=3.5,interpolation=cv2.INTER_AREA)
cv2.imshow('img',dog)
cv2.waitKey(0)
cv2.destroyAllWindows()
缩放前
缩放后

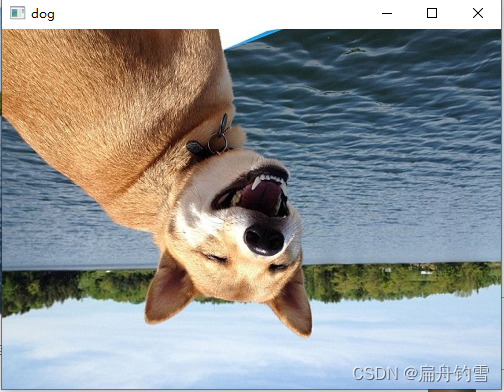
1.2 图像的翻转
- flip(src, flipCode)
- flipCode =0 表示上下翻转
- flipCode >0 表示左右翻转
- flipCode <0 上下 + 左右
# 翻转
import cv2
import numpy as np
#导入图片
dog = cv2.imread('./dog.jpeg')
new_dog = cv2.flip(dog, flipCode=-1)
cv2.imshow('dog', new_dog)
cv2.waitKey(0)
cv2.destroyAllWindows()
翻转前
翻转后
1.3 图像的旋转
- rotate(img, rotateCode)
- ROTATE_90_CLOCKWISE 90度顺时针
- ROTATE_180 180度
- ROTATE_90_COUNTERCLOCKWISE 90度逆时针
# 旋转
import cv2
import numpy as np
#导入图片
dog = cv2.imread('./dog.jpeg')
new_dog = cv2.rotate(dog, rotateCode=cv2.cv2.ROTATE_90_COUNTERCLOCKWISE)
cv2.imshow('dog', new_dog)
cv2.waitKey(0)
cv2.destroyAllWindows()
旋转前
旋转后

2.图像的仿射变换
2.1 仿射变换之 图像平移
-
仿射变换是图像旋转, 缩放, 平移的总称.具体的做法是通过一个矩阵和和原图片坐标进行计算, 得到新的坐标, 完成变换. 所以关键就是这个矩阵.
-
warpAffine(src, M, dsize, flags, mode, value)
-
M:变换矩阵
-
dsize: 输出图片大小
-
flag: 与resize中的插值算法一致
-
mode: 边界外推法标志
-
value: 填充边界值
-
平移矩阵
- 矩阵中的每个像素由(x,y)组成,(x, y)表示这个像素的坐标. 假设沿x轴平移 t x t_x tx, 沿y轴平移 t y t_y ty, 那么最后得到的坐标为 ( x ^ , y ^ ) = ( x + t x , y + t y ) (\hat x, \hat y) = (x + t_x, y + t_y) (x^,y^)=(x+tx,y+ty), 用矩阵表示就是:
( x ^ y ^ 1 ) = ( 1 0 t x 0 1 t y 0 0 1 ) ( x y 1 ) \left(\begin{matrix}\hat x \\\hat y \\1\end{matrix}\right) = \left(\begin{matrix}1 & 0 & t_x\\0 & 1 & t_y\\0 & 0 & 1\end{matrix}\right)\left(\begin{matrix}x \\y \\1\end{matrix}\right) ⎝ ⎛x^y^1⎠ ⎞=⎝ ⎛100010txty1⎠ ⎞⎝ ⎛xy1⎠ ⎞
- 矩阵中的每个像素由(x,y)组成,(x, y)表示这个像素的坐标. 假设沿x轴平移 t x t_x tx, 沿y轴平移 t y t_y ty, 那么最后得到的坐标为 ( x ^ , y ^ ) = ( x + t x , y + t y ) (\hat x, \hat y) = (x + t_x, y + t_y) (x^,y^)=(x+tx,y+ty), 用矩阵表示就是:
#旋转狗的图片
dog=cv2.imread('./file_1636622671261/code/dog.jpeg')
#获取原始图片的大小
h,w,ch=dog.shape
#获取变换矩阵 以点100,100为中心 旋转 15度 缩放比例为1
M=cv2.getRotationMatrix2D((100,100),15,1)
#放射变化
dog=cv2.warpAffine(dog,M,dsize=(w,h))
cv2.imshow('img',dog)
cv2.waitKey(0)
cv2.destroyAllWindows()
平移前
平移后

2.2 仿射变换之获取变换矩阵
仿射变换的难点就是计算变换矩阵, OpenCV提供了计算变换矩阵的API
- getRotationMatrix2D(center, angle, scale)
- center 中心点 , 以图片的哪个点作为旋转时的中心点.
- angle 角度: 旋转的角度, 按照逆时针旋转.
- scale 缩放比例: 想把图片进行什么样的缩放.
# 仿射变换之平移
import cv2
import numpy as np
#导入图片
dog = cv2.imread('./dog.jpeg')
h, w, ch = dog.shape
# M = np.float32([[1, 0, 100], [0, 1, 0]])
# 注意旋转的角度为逆时针.
# M = cv2.getRotationMatrix2D((100, 100), 15, 1.0)
# 以图像中心点旋转 M则为计算后的变换矩阵
M = cv2.getRotationMatrix2D((w/2, h/2), 15, 1.0)
# 注意opencv中是先宽度, 再高度
new = cv2.warpAffine(dog, M, (w, h))
cv2.imshow('new', new)
cv2.waitKey(0)
cv2.destroyAllWindows()
-
getAffineTransform(src[], dst[]) 通过三点可以确定变换后的位置, 相当于解方程, 3个点对应三个方程, 能解出偏移的参数和旋转的角度.
- src原目标的三个点
- dst对应变换后的三个点
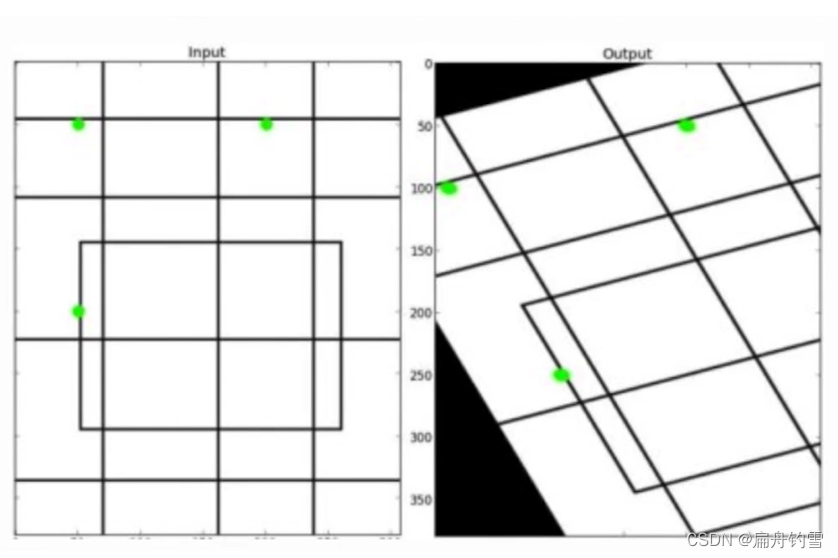
# 通过三个点来确定M
# 仿射变换之平移
import cv2
import numpy as np
#导入图片
dog = cv2.imread('./dog.jpeg')
h, w, ch = dog.shape
# 一般是横向和纵向的点, 所以一定会有2个点横坐标相同, 2个点纵坐标相同
src = np.float32([[200, 100], [300, 100], [200, 300]])
dst = np.float32([[100, 150], [360, 200], [280, 120]])
M = cv2.getAffineTransform(src, dst)
# 注意opencv中是先宽度, 再高度
new = cv2.warpAffine(dog, M, (w, h))
cv2.imshow('new', new)
cv2.waitKey(0)
cv2.destroyAllWindows()
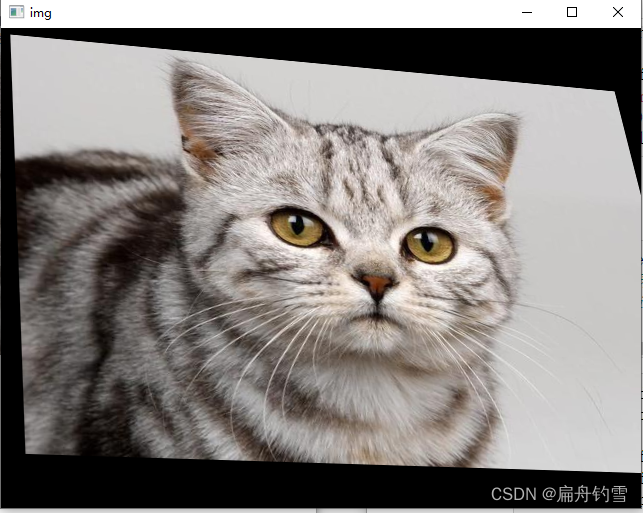
2.3 仿射变换之 图片的透视变换
透视变换就是将一种坐标系变换成另一种坐标系. 简单来说可以把一张"斜"的图变"正",或者将一张 ‘正’ 图片 变 ‘斜’
img=cv2.imread('./file_1636622671261/code/cat.jpeg')
print(img.shape)
#获取变换矩阵
ori_point=np.float32([[10,10],[210,110],[0,350],[250,390]])
res_point=np.float32([[20,15],[230,110],[20,300],[300,350]])
M=cv2.getPerspectiveTransform(ori_point,res_point)
img2=cv2.warpPerspective(img,M,dsize=(640,480))
cv2.imshow('img',img2)
cv2.waitKey(0)
cv2.destroyAllWindows()
变斜前:

变斜后