这是搬来的红酒瓶标签曲面展平+文字识别
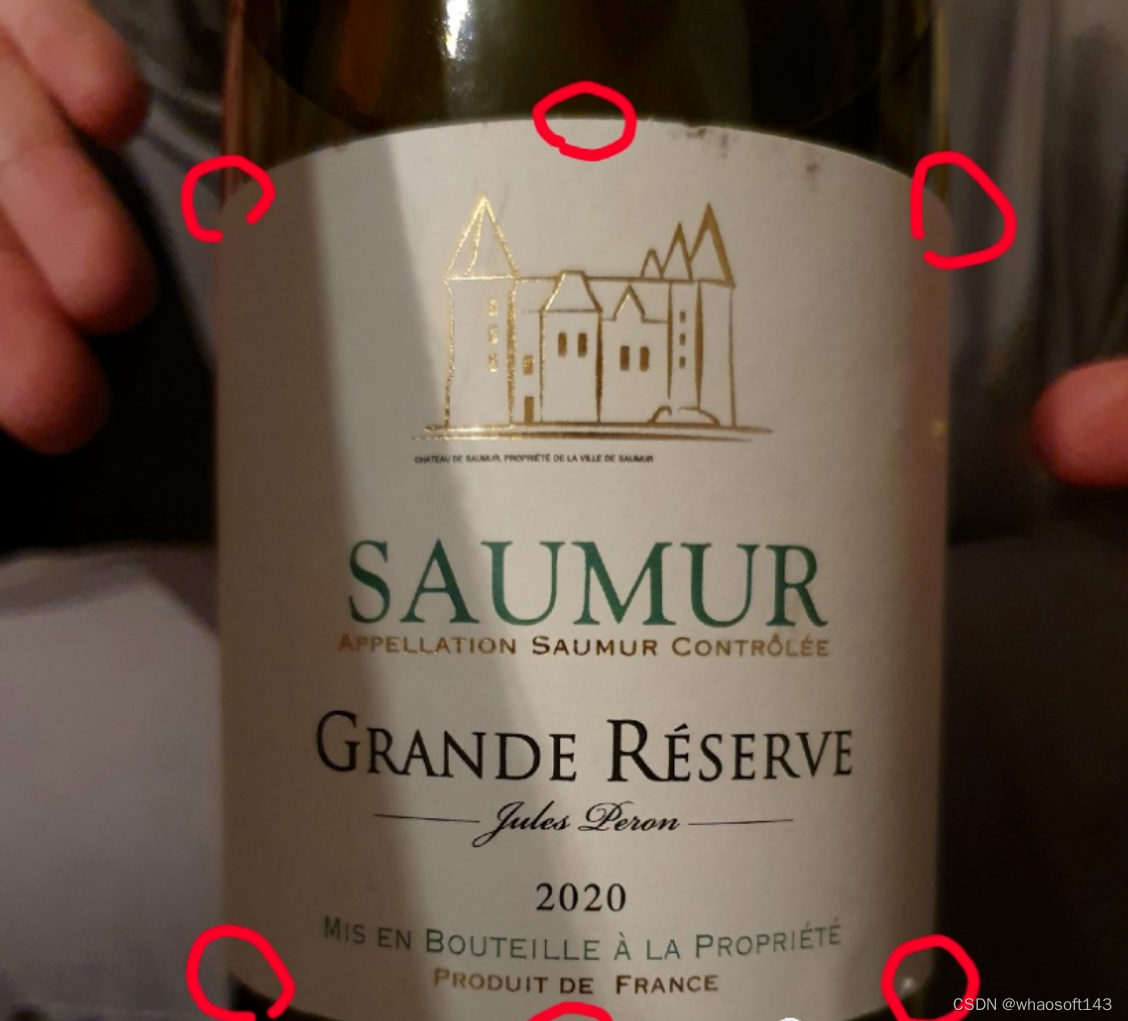
本文的目标是让计算机从一张简单的照片中读取一瓶红酒上标签文字的内容。因为酒瓶标签上的文本在圆柱体上是扭曲的,我们无法直接提取并识别字符,所以一般都会将曲面标签展平之后再做识别,以提升准确率。

第一部分:传统方法提取标签
以上图为例,先尝试使用传统图像处理方法提取标签轮廓。
【1】转为灰度图 + 自适应二值化

 【2】高斯滤波平滑 + 固定阈值二值化
【2】高斯滤波平滑 + 固定阈值二值化


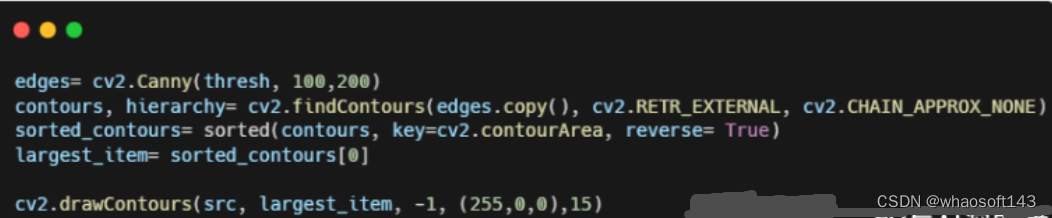
【3】轮廓提取排序,查找最大面积轮廓

【4】批量测试,检测算法稳定性

批量测试后发现在其他图片上并不能很好的提取标签轮廓,所以我们需要考虑其他方法来解决。
第二部分:使用深度学习图像分割网络(U-Net)提取标签
【1】准备数据集(图像 + mask标签)

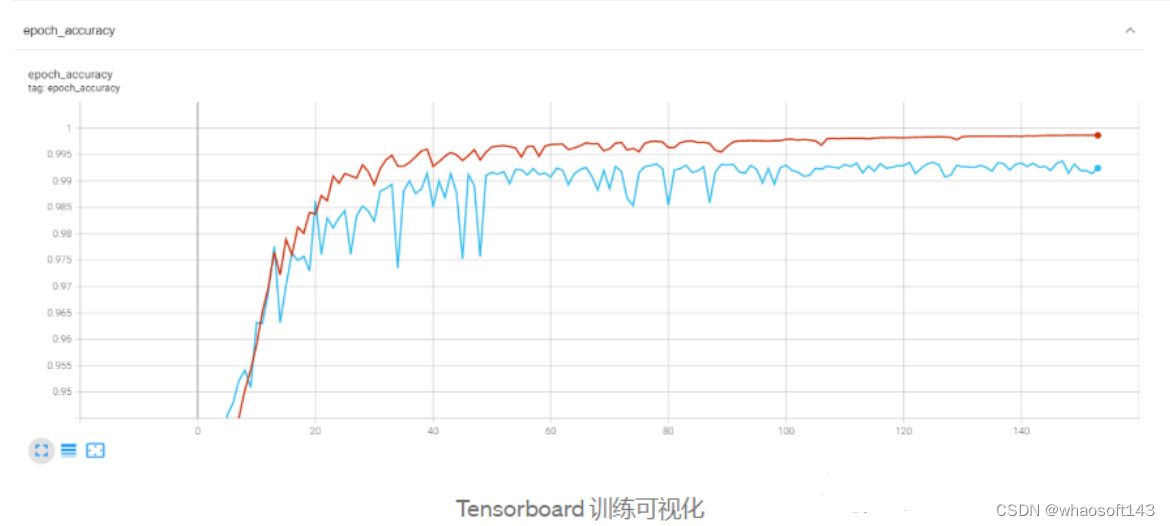
【2】训练U-Net网络模型
U-Net网络代码(TensorFlow实现):
def build_model(self, Config):inputs = tf.keras.layers.Input((256,256,3))s = tf.keras.layers.Lambda(lambda x: x / 255)(inputs)#Contraction pathc1 = tf.keras.layers.Conv2D(16, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(s)c1 = tf.keras.layers.Dropout(Config['contraction_1_dropout'])(c1)c1 = tf.keras.layers.Conv2D(16, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c1)p1 = tf.keras.layers.MaxPooling2D((2, 2))(c1)c2 = tf.keras.layers.Conv2D(32, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(p1)c2 = tf.keras.layers.Dropout(Config['contraction_2_dropout'])(c2)c2 = tf.keras.layers.Conv2D(32, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c2)p2 = tf.keras.layers.MaxPooling2D((2, 2))(c2)c3 = tf.keras.layers.Conv2D(64, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(p2)c3 = tf.keras.layers.Dropout(Config['contraction_3_dropout'])(c3)c3 = tf.keras.layers.Conv2D(64, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c3)p3 = tf.keras.layers.MaxPooling2D((2, 2))(c3)c4 = tf.keras.layers.Conv2D(128, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(p3)c4 = tf.keras.layers.Dropout(Config['contraction_4_dropout'])(c4)c4 = tf.keras.layers.Conv2D(128, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c4)p4 = tf.keras.layers.MaxPooling2D(pool_size=(2, 2))(c4)c5 = tf.keras.layers.Conv2D(256, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(p4)c5 = tf.keras.layers.Dropout(Config['contraction_5_dropout'])(c5)c5 = tf.keras.layers.Conv2D(256, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c5)#Expansive pathu6 = tf.keras.layers.Conv2DTranspose(128, (2, 2), strides=(2, 2), padding='same')(c5)u6 = tf.keras.layers.concatenate([u6, c4])c6 = tf.keras.layers.Conv2D(128, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(u6)c6 = tf.keras.layers.Dropout(Config['expansive_1_dropout'])(c6)c6 = tf.keras.layers.Conv2D(128, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c6)u7 = tf.keras.layers.Conv2DTranspose(64, (2, 2), strides=(2, 2), padding='same')(c6)u7 = tf.keras.layers.concatenate([u7, c3])c7 = tf.keras.layers.Conv2D(64, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(u7)c7 = tf.keras.layers.Dropout(Config['expansive_2_dropout'])(c7)c7 = tf.keras.layers.Conv2D(64, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c7)u8 = tf.keras.layers.Conv2DTranspose(32, (2, 2), strides=(2, 2), padding='same')(c7)u8 = tf.keras.layers.concatenate([u8, c2])c8 = tf.keras.layers.Conv2D(32, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(u8)c8 = tf.keras.layers.Dropout(Config['expansive_3_dropout'])(c8)c8 = tf.keras.layers.Conv2D(32, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c8)u9 = tf.keras.layers.Conv2DTranspose(16, (2, 2), strides=(2, 2), padding='same')(c8)u9 = tf.keras.layers.concatenate([u9, c1], axis=3)c9 = tf.keras.layers.Conv2D(16, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(u9)c9 = tf.keras.layers.Dropout(Config['expansive_4_dropout'])(c9)c9 = tf.keras.layers.Conv2D(16, (3, 3), activation='relu', kernel_initializer='he_normal', padding='same')(c9)outputs = tf.keras.layers.Conv2D(1, (1, 1), activation='sigmoid')(c9)model = tf.keras.Model(inputs=[inputs], outputs=[outputs])return model
【3】图像推理验证
 样本外预测示例
样本外预测示例
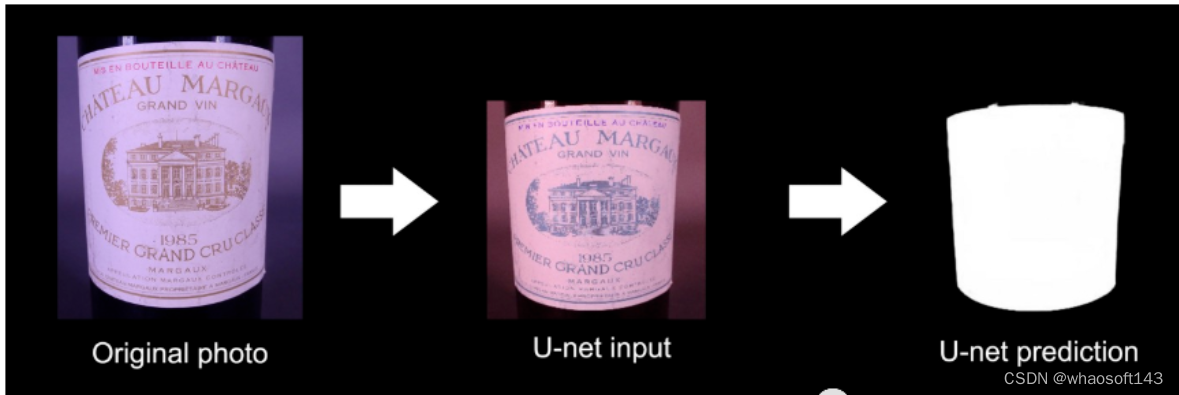
样本外预测示例
个别因干扰而分割失败的情况(暂时忽略):
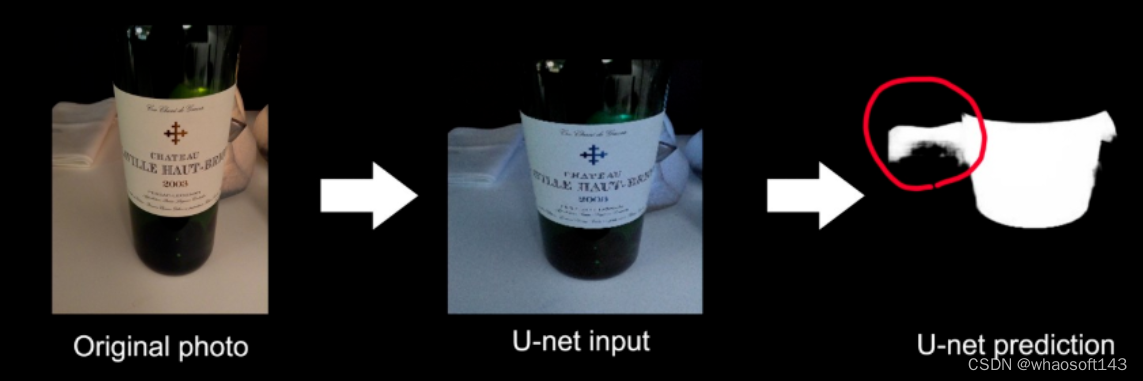
样本外预测示例
第三部分:曲面标签展平与文字识别
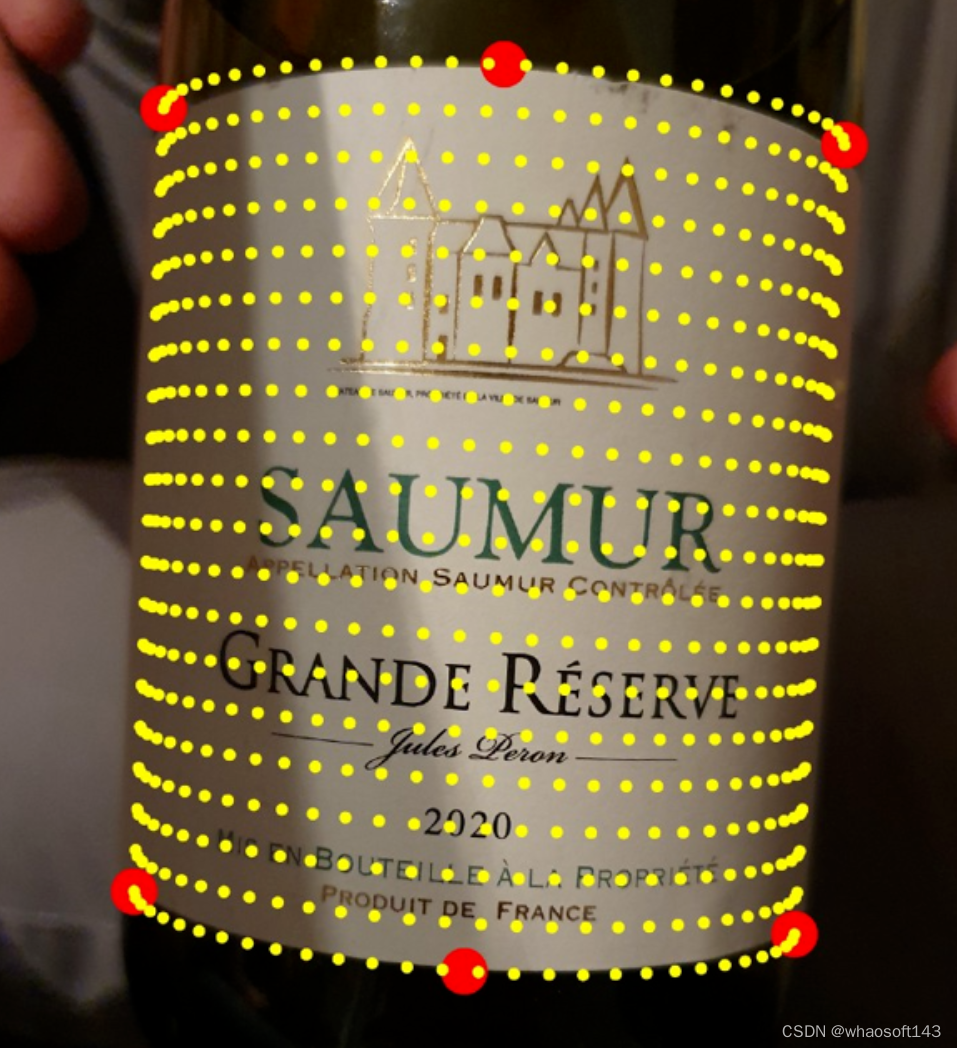
【1】根据分割结果提取6个特征点
调整图像大小、二值化、对齐U-Net预测:
# mask is the U-net output image# src is the source image# self is the parent class labelVisionmask = cv2.cvtColor(mask,cv2.COLOR_GRAY2RGB)mask=cv2.resize(mask,(src.shape[1],src.shape[0]))mask = np.round(mask) #binary transformr_src, r_mask = self.align_vertically(src, mask)
 如下方法先找到对角线的 A、C、D 和 F 坐标点,并通过计算简单距离计算找到 B 坐标:
如下方法先找到对角线的 A、C、D 和 F 坐标点,并通过计算简单距离计算找到 B 坐标:
其中 XB 是 B 点的 X 坐标。我们现在可以选择与该 XB 位置对应的图像的列向量 (lambda):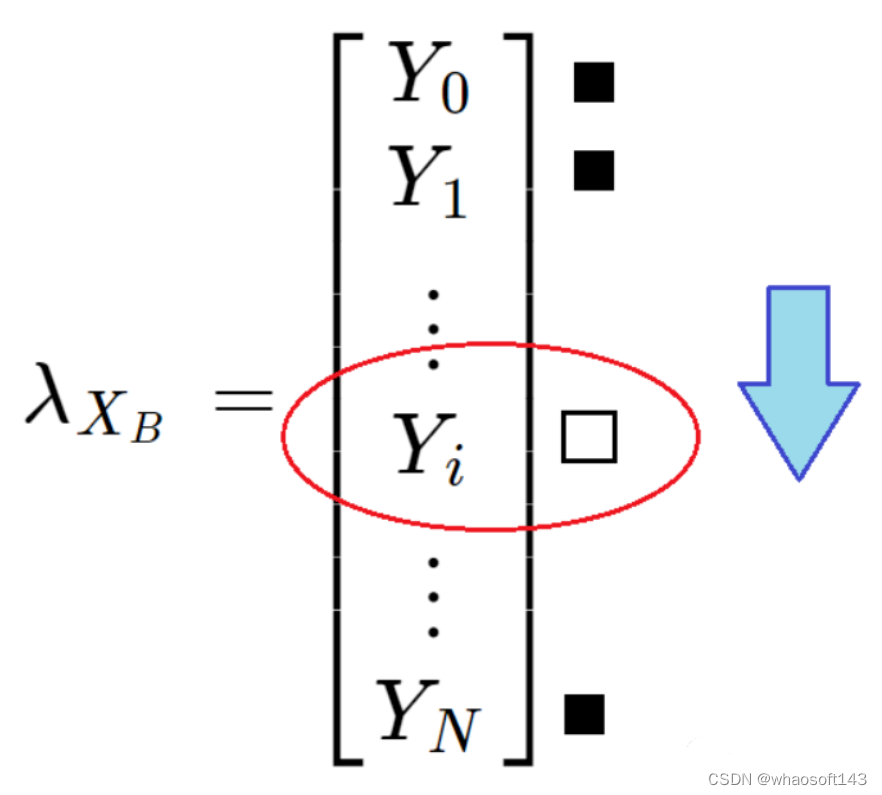 我们在向量中从上到下迭代以找到第一个白色像素以减去 B 点的 Y 坐标。
我们在向量中从上到下迭代以找到第一个白色像素以减去 B 点的 Y 坐标。
E 点的逻辑是相同的:我们在 D 和 F 点的中间找到列向量,这次我们从下到上迭代,直到找到第一个白色像素。
要获取实现的详细代码,请查看文末代码中的getCylinderPoints方法。
【2】根据6个特征点做曲面展平
网格圆柱投影:
标签展平: whaosoft aiot http://143ai.com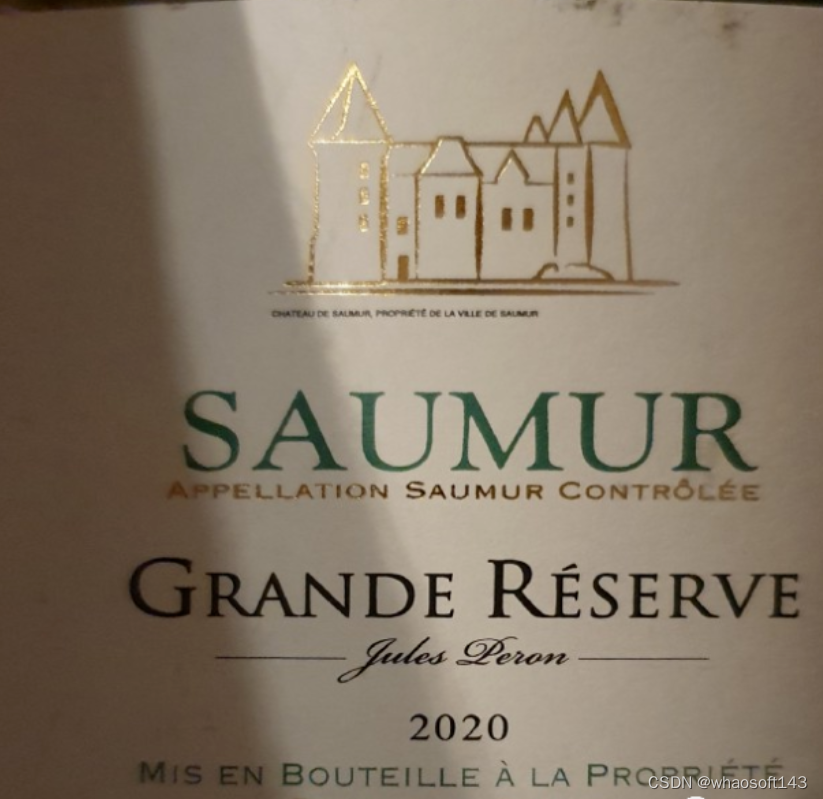
【3】OCR文字识别
原始图像 OCR结果:
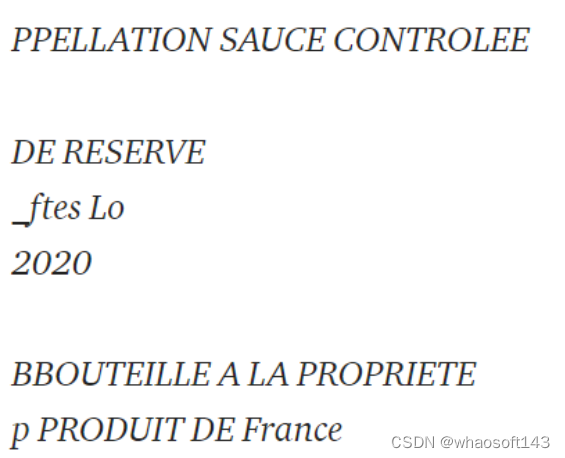
展平图像 OCR结果:
虽然展平图像 OCR结果不一定完美,但相比原始图像OCR结果要好很多。
源码下载:
https://github.com/AntoninLeroy/wine_label_reader_toolkit