前言
最近在摸索点云数据的处理,希望实现对点云数据的目标检测。但是在复现PointPillars算法时遇到很多坑,特此记录一下。不建议在windows环境下测试程序,笔者自己测试下,windows总会遇到奇奇怪怪的报错。
本机安装环境
Unbuntu18.04
Python 3.7
Pytorch 1.10
cuda 11.1
spconv v2.1.22
安装Spconv
进入Spconv官网,根据自己的CUDA版本找到对应的install命令,直接输入即可。
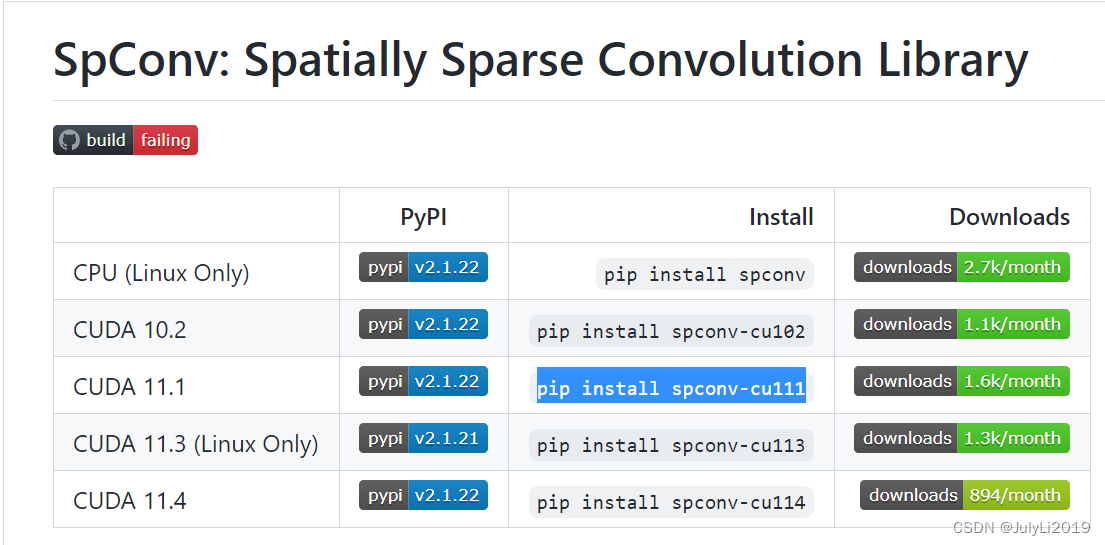
本次安装选用v2.1.22,安装命令为:pip install spconv-cu111
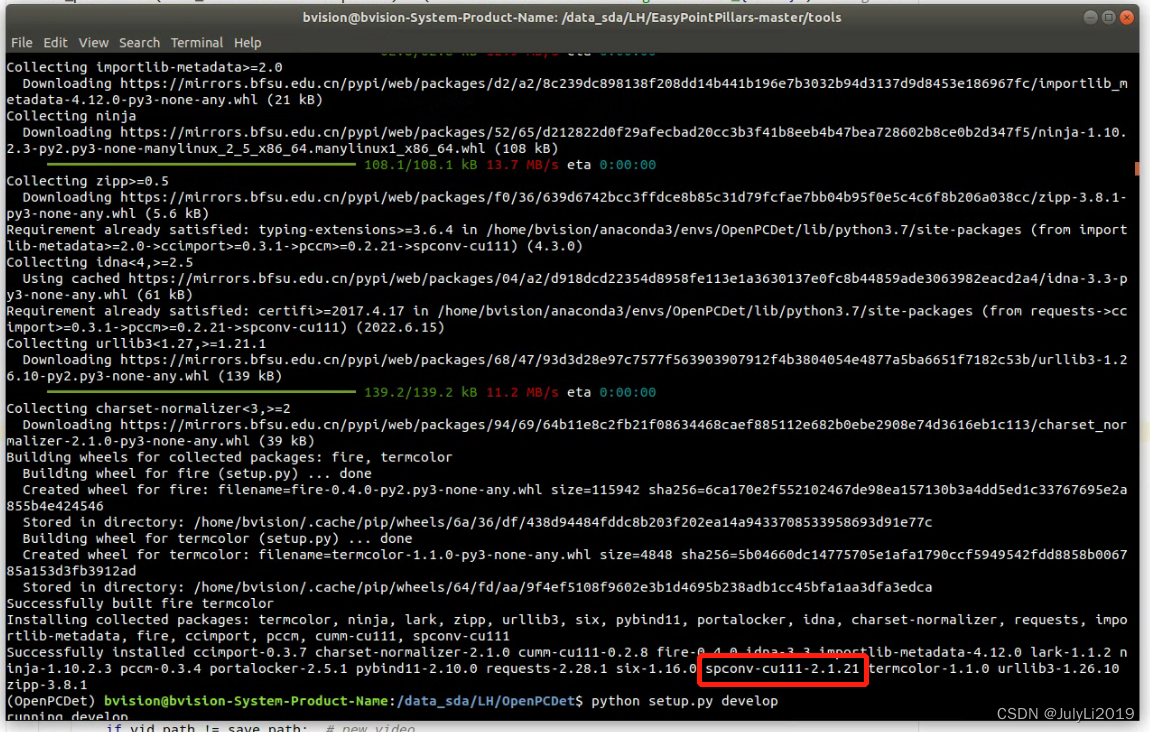
出现上图说明安装成功。
安装pcdet
clone 项目
git clone https://github.com/open-mmlab/OpenPCDet.git
创建并配置虚拟环境
创建
conda create -n OpenPCDet python==3.7
激活
conda activate OpenPCDet
安装环境
先单独安装torch
torch安装连接为:https://pytorch.org/get-started/previous-versions/
本次安装选用的命令行为:
pip install torch==1.10.0+cu111 torchvision==0.11.0+cu111 torchaudio==0.10.0 -f https://download.pytorch.org/whl/torch_stable.html
torch安装完成后,cd 到clone好的OpenPCDet目录下:
pip install -r requirements.txt
安装pcdet
在OpenPCDet目录下:
python setup.py develop
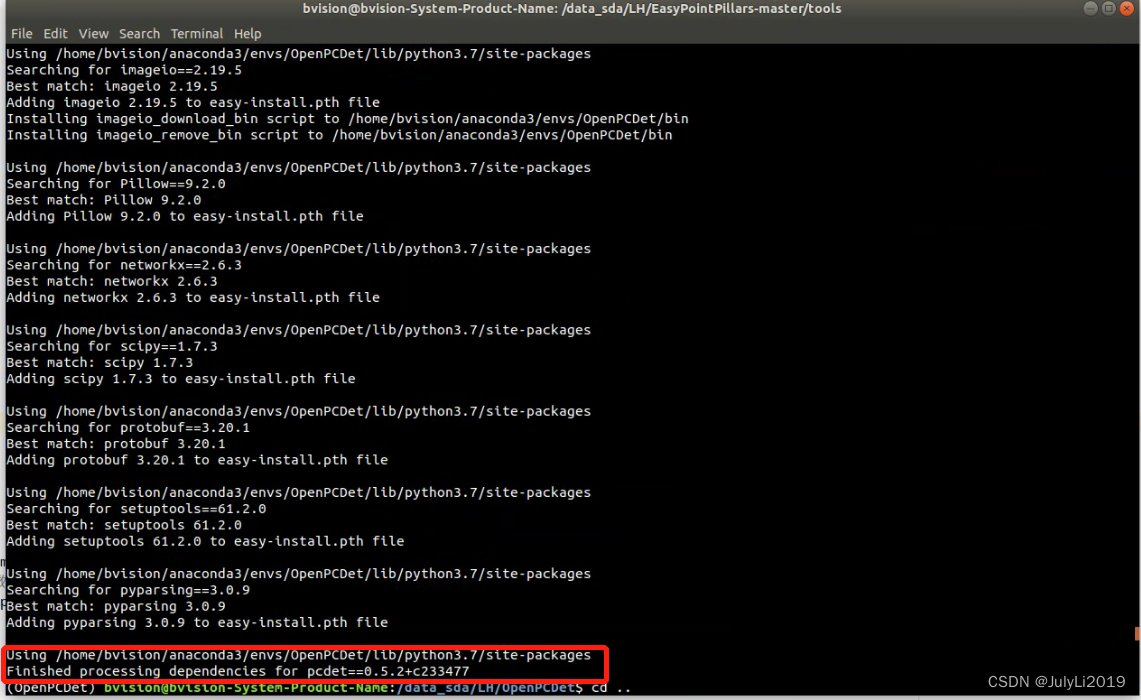
出现上图说明安装成功。
总结
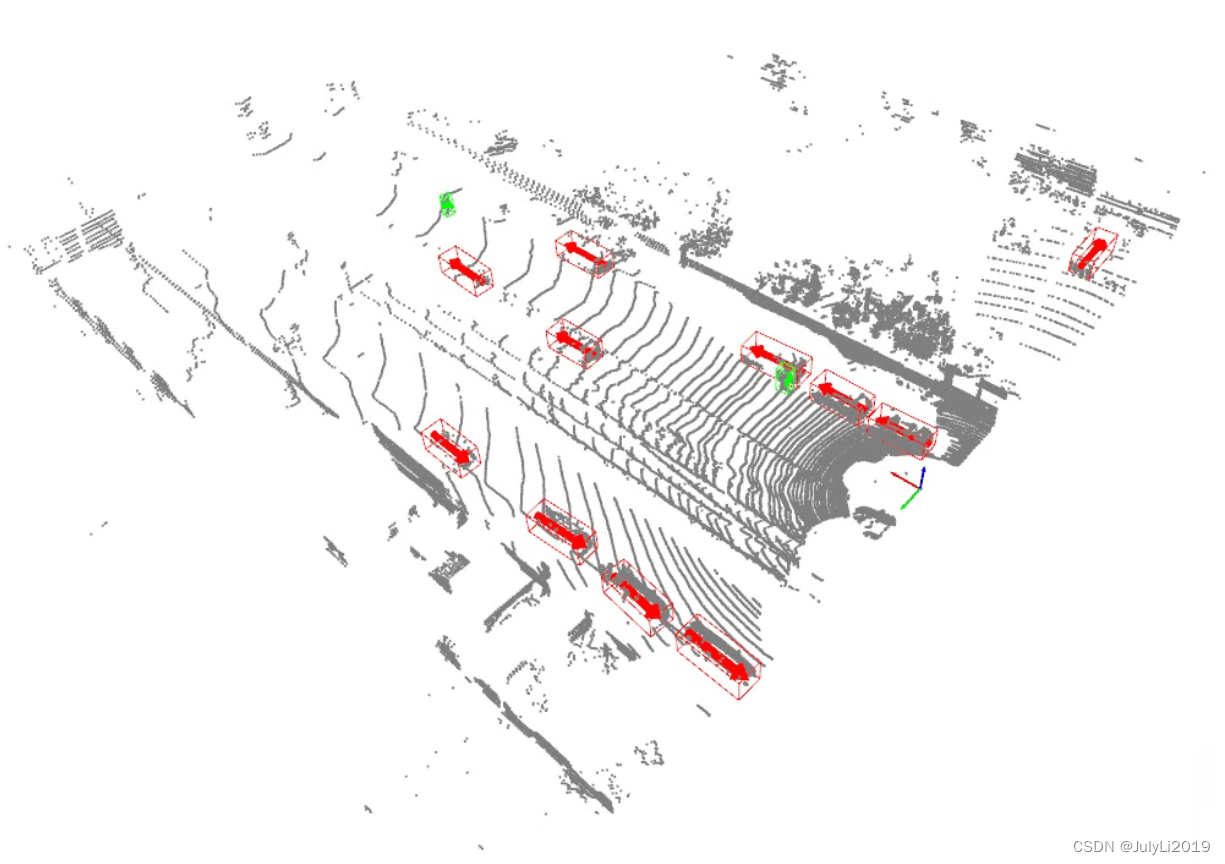
本次环境安装前前后后搞了两天,但最后还是跑出了点云的目标检测算法的demo,结果还算是好的。

参考文档:
https://blog.csdn.net/weixin_48994268/article/details/116746453
https://blog.csdn.net/ylwhxht/article/details/121956936
如果阅读本文对你有用,欢迎一键三连呀!!!
2022年7月21日16:30:41
