目录
IntelRealSense系列SDK开发
RealSense系列深度传感器由Intel公司开发的消费级深度相机,需使用SDK对其进行开发,主要是了获得其传感器数据。
Samples
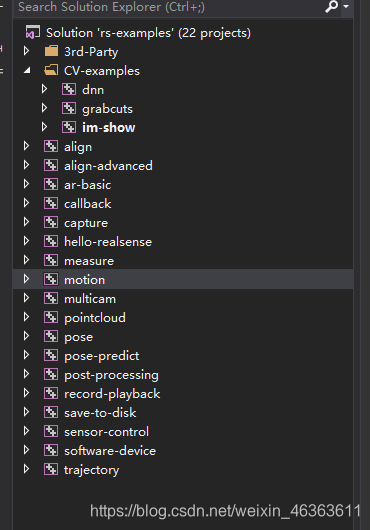
其中,
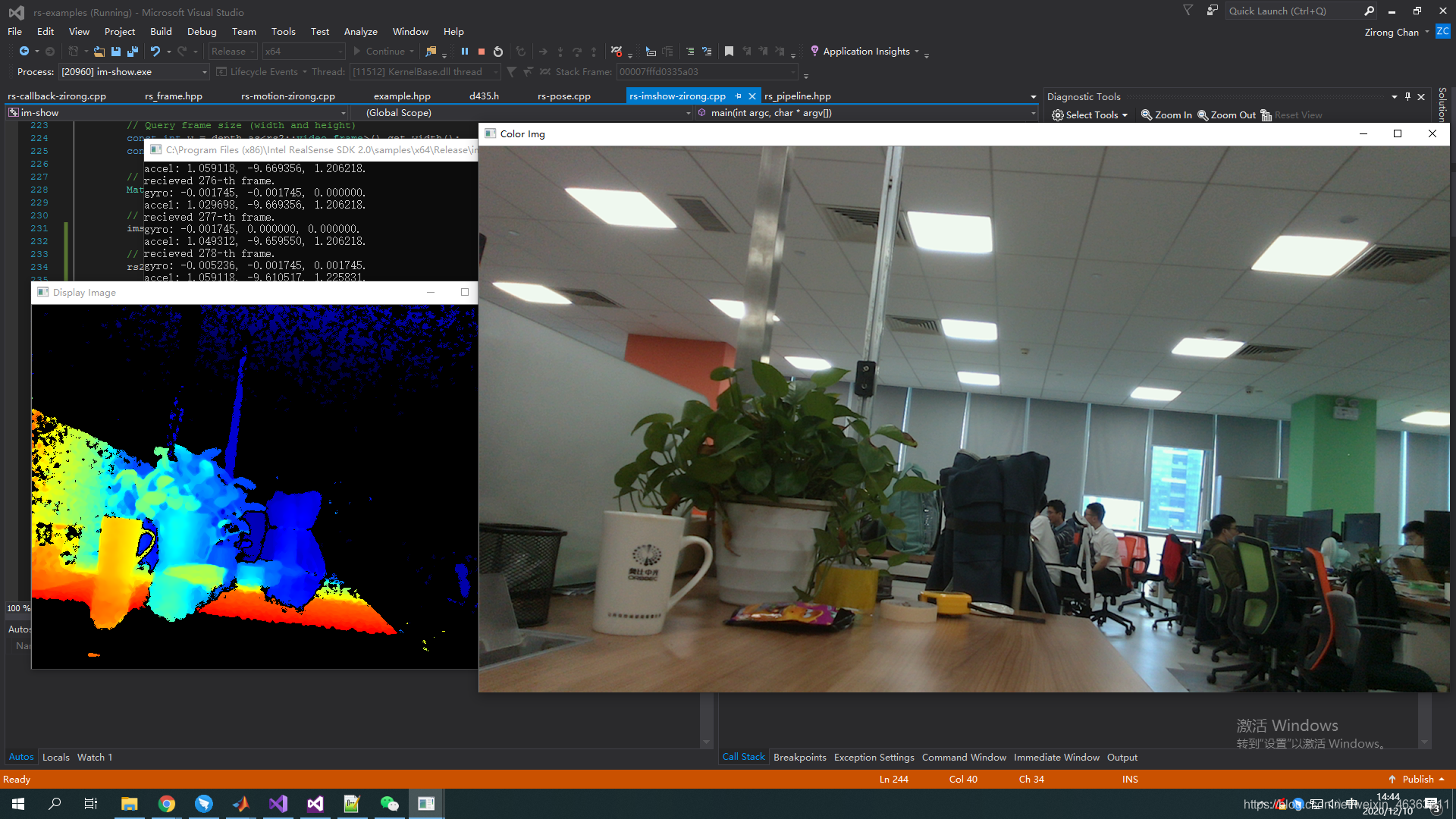
- im-show 提供支持OpenCV的数据接口与显示程序
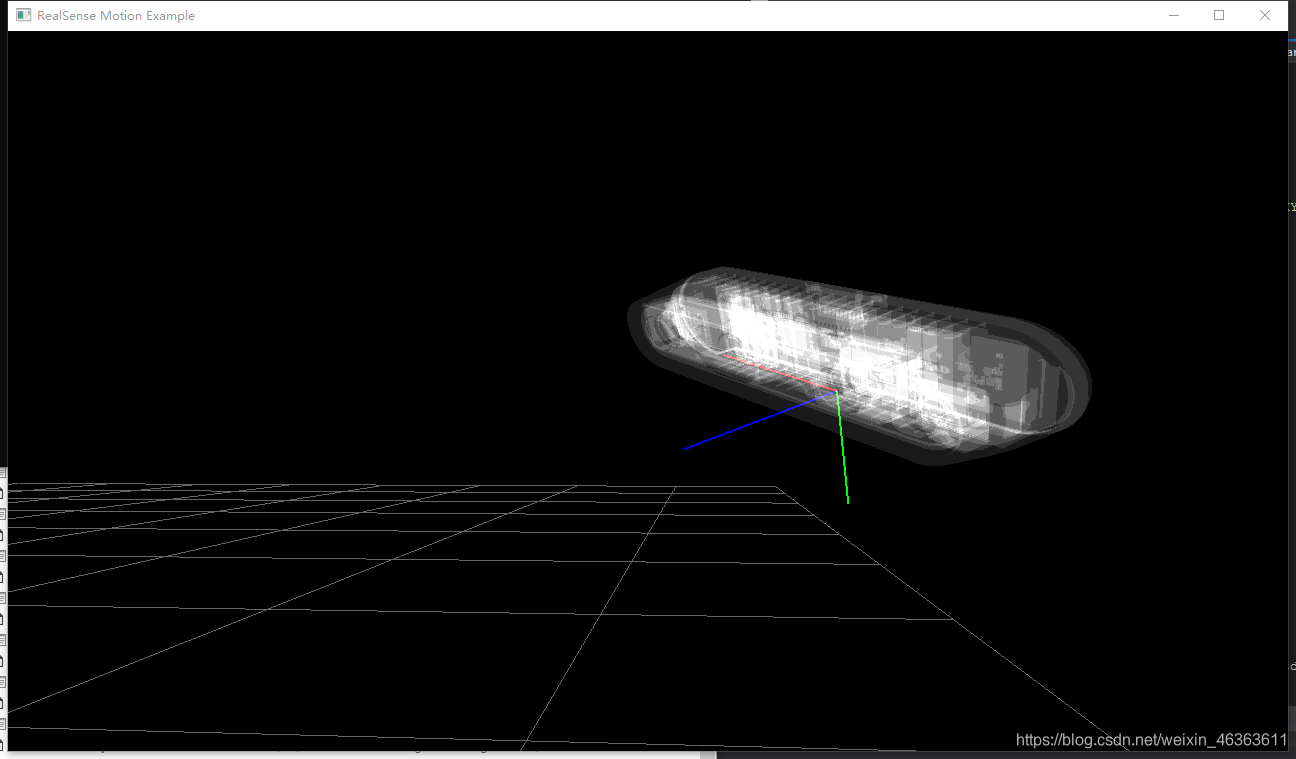
- motion 展示了如何从获取数据中解析陀螺仪与加速计的读数,即IMU数据,并以此展示相机位姿。
- callback 展示了如何通过回调函数,同时获取同步过的图像数据流,与不同步的IMU数据流。

获取数据基本流程
获取同步数据:深度/彩色
创建管线(pipeline)
rs2::pipeline pipe_sync;
配置(config)通过enable/disable函数控制数据流
// only enable the video frames
rs2::config cfg_sync;
//cfg.enable_stream(RS2_STREAM_COLOR, 1920, 1080, RS2_FORMAT_ANY, 30);
cfg_sync.enable_stream(RS2_STREAM_COLOR, 1280, 720, RS2_FORMAT_BGR8, 30);
cfg_sync.enable_stream(RS2_STREAM_DEPTH, 640, 480, RS2_FORMAT_Z16, 30);
cfg_sync.disable_stream(RS2_STREAM_ACCEL);
cfg_sync.disable_stream(RS2_STREAM_GYRO);
启动管线
pipe_sync.start(cfg_sync);
获取同步数据
while (true)
{
rs2::frameset data = pipe_sync.wait_for_frames(); // Wait for next set of frames from the camera
// color
rs2::frame color = data.get_color_frame();
// convert to OpenCV
const int w_clr = color.as<rs2::video_frame>().get_width();
const int h_clr = color.as<rs2::video_frame>().get_height();
Mat color_img(Size(w_clr, h_clr), CV_8UC3, (void*)color.get_data(), Mat::AUTO_STEP);
// depth is related to depth_scale
rs2::depth_frame depth = data.get_depth_frame();
const int w = depth.get_width();
const int h = depth.get_height();
Mat depth_image(Size(w, h), CV_16UC1, (void*)depth.get_data(), Mat::AUTO_STEP);
// depth scale
float depth_scale = depth.get_uints();
// other operation goes here ...
}
停止管线
pipe_sync.stop();
获取运动数据:陀螺仪,加速计
// Declare RealSense pipeline, encapsulating the actual device and sensors
rs2::pipeline pipe;
// Create a configuration for configuring the pipeline with a non default profile
rs2::config cfg;
// Add streams of gyro and accelerometer to configuration
cfg.enable_stream(RS2_STREAM_ACCEL, RS2_FORMAT_MOTION_XYZ32F);
cfg.enable_stream(RS2_STREAM_GYRO, RS2_FORMAT_MOTION_XYZ32F);
// Start streaming with the given configuration;
// Note that since we only allow IMU streams, only single frames are produced
auto profile = pipe.start(cfg, [&](rs2::frame frame)
{
// Cast the frame that arrived to motion frame
auto motion = frame.as<rs2::motion_frame>();
// If casting succeeded and the arrived frame is from gyro stream
if (motion && motion.get_profile().stream_type() == RS2_STREAM_GYRO && motion.get_profile().format() == RS2_FORMAT_MOTION_XYZ32F)
{
// Get the timestamp of the current frame
double ts = motion.get_timestamp();
// Get gyro measures
rs2_vector gyro_data = motion.get_motion_data();
}
// If casting succeeded and the arrived frame is from accelerometer stream
if (motion && motion.get_profile().stream_type() == RS2_STREAM_ACCEL && motion.get_profile().format() == RS2_FORMAT_MOTION_XYZ32F)
{
// Get accelerometer measures
rs2_vector accel_data = motion.get_motion_data();
}
});
使用回调函数获取数据
#include <librealsense2/rs.hpp> // Include RealSense Cross Platform API
#include <iostream>
#include <mutex>
{
std::mutex mutex;
// Define frame callback
// The callback is executed on a sensor thread and can be called simultaneously from multiple sensors
// Therefore any modification to common memory should be done under lock
auto callback = [&](const rs2::frame& frame)
{
std::lock_guard<std::mutex> lock(mutex);
if (rs2::frameset fs = frame.as<rs2::frameset>())
{
// With callbacks, all synchronized stream will arrive in a single frameset
for (const rs2::frame& f : fs)
// operation ...
}
else
{
// Stream that bypass synchronization (such as IMU) will produce single frames
// not a frameset class
// operations ...
}
};
// Declare RealSense pipeline, encapsulating the actual device and sensors.
rs2::pipeline pipe;
// Start streaming through the callback with default recommended configuration
// The default video configuration contains Depth and Color streams
// If a device is capable to stream IMU data, both Gyro and Accelerometer are enabled by default
//
rs2::pipeline_profile profiles = pipe.start(callback);
while (true)
{
// operations ...
}
}
进阶操作
使用不同的管线获取同一设备不同流
// Declare RealSense pipeline, encapsulating the actual device and sensors.
rs2::pipeline pipe_sync;
// only enable the video frames
rs2::config cfg_sync;
//cfg.enable_stream(RS2_STREAM_COLOR, 1920, 1080, RS2_FORMAT_ANY, 30);
cfg_sync.enable_stream(RS2_STREAM_COLOR, 1280, 720, RS2_FORMAT_BGR8, 30);
cfg_sync.enable_stream(RS2_STREAM_DEPTH, 640, 480, RS2_FORMAT_Z16, 30);
cfg_sync.disable_stream(RS2_STREAM_ACCEL);
cfg_sync.disable_stream(RS2_STREAM_GYRO);
// Pipeline for IMU data
rs2::pipeline pipe_imu;
rs2::config cfg_imu;
cfg_imu.disable_stream(RS2_STREAM_COLOR);
cfg_imu.disable_stream(RS2_STREAM_DEPTH);
cfg_imu.enable_stream(RS2_STREAM_ACCEL, RS2_FORMAT_MOTION_XYZ32F);
cfg_imu.enable_stream(RS2_STREAM_GYRO, RS2_FORMAT_MOTION_XYZ32F);
pipe_sync.start();
pipe_imu.start();
// Operation goes here
pipe_sync.stop();
pipe_imu.stop();
同时开启不同设备
rs2::context ctx; // Create librealsense context for managing devices
std::map<std::string, rs2::colorizer> colorizers; // Declare map from device serial number to colorizer (utility class to convert depth data RGB colorspace)
std::vector<rs2::pipeline> pipelines;
// Capture serial numbers before opening streaming
std::vector<std::string> serials;
for (auto&& dev : ctx.query_devices())
serials.push_back(dev.get_info(RS2_CAMERA_INFO_SERIAL_NUMBER));
// Start a streaming pipe per each connected device
for (auto&& serial : serials)
{
rs2::pipeline pipe(ctx);
rs2::config cfg;
cfg.enable_device(serial);
pipe.start(cfg);
pipelines.emplace_back(pipe);
// Map from each device's serial number to a different colorizer
colorizers[serial] = rs2::colorizer();
}
// other operation goes here ...
获取相机参数
rs2::frameset data = pipe_sync.wait_for_frames(); // Wait for next set of frames from the camera
rs2::frame color = data.get_color_frame();
rs2_intrinsics intr = color.get_profile().as<rs2::video_stream_profile>().get_intrinsics(); // Calibration data
获取真实深度
rs2::frameset data = pipe_sync.wait_for_frames(); // Wait for next set of frames from the camera
// depth data
rs2::depth_frame depth = data.get_depth_frame();
// Query frame size (width and height)
const int w = depth.get_width();
const int h = depth.get_height();
cv::Mat depth_image = cv::Mat(Size(w, h), CV_16UC1);
for (int coo_x = 0; coo_x < w; coo_x++)
{
for (int coo_y = 0; coo_y < h; coo_y++)
{
// in metrics
float dist = depth.get_distance(coo_x, coo_y);
// convert to millimeter
depth_image.at<ushort>(coo_y, coo_x) = std::floor(dist * 1e3);
}
}
开发采集工具
- 使用两个管线分别采集图像/IMU数据;
- 将获取IMU数据的管线作为一个独立线程,利用其低存储尺寸的特点,到采集结束再写入硬盘;
- 另起两个独立线程解决串行图像数据存储问题(彩色、深度)。