源自:《无人系统技术》
作者:熊泽昊 李杰 牛轶峰
摘 要
生成对抗网络(GAN)在无人系统多个层次上的应用提高了其智能化、自主化水平,具有巨大的应用价值和发展潜力。对GAN在无人系统技术中的应用进行了综合评述并且进行了展望。首先介绍了GAN的基本概念、训练方式和传统GAN的模型结构,并且从模型结构的变动、目标损失的变化以及适用的领域等方面详细介绍了深度卷积生成对抗网络(DCGAN)、循环生成对抗网络(CylcleGAN)、生成对抗模仿学习(GAIL)、序列生成对抗网络(SeqGAN)等GAN的8种衍生模型。接着概述了与无人系统OODA回路相关的智能感知、智能判断、智能决策、人机交互等方向上GAN方法的实际应用。最后基于无人系统共性技术的发展趋势,对GAN在无人系统的单体智能、多体或群体智能以及人机混合智能等方向上的应用进行了展望。
关键词
无人系统;人工智能;生成对抗网络;决策规划;环境感知;人机交互
1 引 言
无人系统具有成本低、伤亡小、生存能力强、性能好等特点,能够在各种枯燥乏味(Dull)、环境恶劣(Dirty)、危险(Dangerous)、纵深(Deep)的4D环境中替代人类完成任务。无人系统涵盖了无人机(Unmanned Aerial Vehicle,UAV)、无人水下潜航器UUV(Unmanned Underwater Vehicle,UUV)、无人水面艇(Unmanned Surface Vessel,USV)、无人地面车辆(Unmanned Ground Vehicle,UGV)等无人系统平台,被广泛应用于城市反恐、情报收集、损毁评估等军事领域,在物流、医疗、交通、消防等民用领域也表现出了强劲的发展势头。而现有无人系统人工智能水平低且自主能力不足,提高无人系统的智能化水平是智能社会、国防现代化建设发展的关键。
2 GAN及其衍生方法
2.1 GAN的基本概念
Goodfellow等[4]基于零和博弈的思想提出了GAN框架。GAN旨在构建相互对抗的生成器和判别器,根据不同的目标达成两者的博弈关系。判别器用于判别输入样本是否是真实样本,生成器用于生成干扰判别器判断的虚假样本,通过对抗训练同时提高两者的性能。
2.2 GAN的网络结构
本节主要介绍了GAN的基本结构和训练过程,GAN为了适应不同任务,其中的神经网络可以用CNN、循环神经网络(Recurrent Neural Network,RNN)替代。生成器从潜在变量 中生成样本,将生成器表示为潜在空间到真实空间的映射函数:,其中, 为潜在空间抽样的隐变量, 为真实数据。判别器输出样本是否真实的概率值,被抽象为将数据映射到真假分布的概率函数:。GAN的结构图如图1所示。
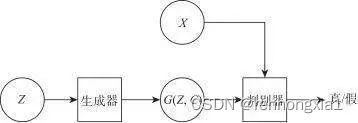
图1 生成对抗网络模型
在图1中,真实样本 和生成样本 同时放入GAN中,判别器在开始训练时能很快的区分真假样本。而随着训练继续,判别器逐渐难以区分生成样本和真实样本的差异性。最后,判别器无法再区分二者的差异。在GAN的训练过程中,潜在变量会生成虚假样本 ,判别器会判断其是真实的样本 还是虚假的样本 。优化的目标函数为
式中, 和 为生成器和判别器的参数, 和 分别表示真实样本的概率分布和生成样本的概率分布, 为二元交叉熵损失函数。
对于判别器而言,最大化 被作为判别器的优化目标。同时,最小化 被作为生成器的优化目标。当生成器最小化 时,判别器会尝试最大化 ,两者之间的联系如式(1)所示。
在训练的过程中,会采用训练多次判别器、1次生成器的方式保证两者之间的“博弈”平衡。因此,当生成器的参数固定时,对 进行求导,得出最优判别器 为
将式(2)代入式(1),得出当最优判别器的参数稳定时,生成器的优化目标等价于最小化 与 之间的JS散度(Jenson Shannon Divergence,JSD)。当 时,生成样本的分布与原始样本的分布相近,两者达到了难以区分的程度。
2.3 GAN的衍生模型
GAN及其衍生模型在无人系统的智能化发展中发挥了重要作用。本节提出了其中8种具有代表性的GAN衍生模型。它们解决了无人系统在智能感知、智能判断、智能决策、人机交互等方面的一系列突出问题。
其中,深度卷积生成对抗网络(Deep Convolutional Generative Adversarial Networks,DCGAN)、循环生成对抗网络(Cylcle Generative Adversarial Networks,CylcleGAN)、多尺度梯度生成对抗性网络(Multi-Scale Gradient Generative Adversarial Networks,MSG-GAN)提高了图像生成的清晰度和风格迁移的效率,主要应用在无人系统的智能感知和智能判断等方向上。Wasserstein-生成对抗网络(Wasserstein Generative Adversarial Networks,WGAN)使用了Wasserstein距离作为评判原始数据分布和生成数据分布之间差异的标准,在处理分布较为复杂的问题上具有强大的潜力,主要应用在无人系统的语音处理上,用于拟合复杂的语音数据分布。生成对抗模仿学习(Generative Adversarial Imitation Learning,GAIL)、序列生成对抗网络(Sequence Generative Adversarial Networks,SeqGAN)都是强化学习与GAN的结合,传统强化学习方法往往缺乏了专家信息的指导,GAN的引入替代了原有人工设置的奖励函数,并且在其处理离散数据的问题上有了新的启发,主要应用在无人系统的智能决策和自然语言处理相关的问题中。时空预测生成对抗网络(LSTM Generative Adversarial Networks,GAN-LSTM)提出了使用RNN捕获时序数据的相关性特征,是GAN在应用方向上的一种扩展,主要用于处理无人系统中具有时序特征的数据。可解释生成对抗网络(Interpretable Generative Adversarial Networks,Interpretable GAN)是最新的研究成果之一,着重解决的是GAN的可解释性问题,在无人系统技术的各个方面具备一定的应用潜力。图2汇总了近年来GAN的重要衍生模型及其特点。

图2 生成对抗网络的发展过程
2.3.1 深度卷积生成对抗网络(DCGAN)
DCGAN[5]首次将CNN和GAN结合,这使生成器生成的样本在质量和多样性上得到了提升。DCGAN通过CNN提高了GAN提取样本特征的质量和速度,保留了样本的结构化信息和整体语义。DCGAN的结构如图3所示。

图3 深度卷积生成对抗网络模型
在图3中,DCGAN的生成器和判别器都使用CNN替代原始的神经网络结构。目的是为了提高GAN在高分辨率图像上的训练效果,CNN可以快速地提取样本的特征。
虽然DCGAN保留了样本的特征,但生成器所生成的样本质量不高。而且DCGAN仍然存在不稳定性因素,随着模型训练时间延长,模型有时会体现出单一震荡模式,生成器的生成样本会收敛到同一种结果上,这需要研究者进行进一步研究。
2.3.2 循环生成对抗网络(CycleGAN)
CycleGAN[6]用在两种不同风格的样本数据相互转换的问题上时,不需要类似pix2pix[7]的成对样本训练。CycleGAN的具体结构如图4所示。
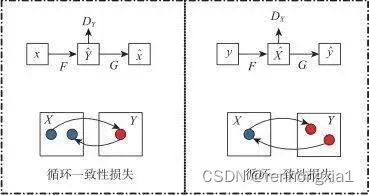
图4 循环生成对抗网络模型
在图4中, 和 分别为两种不同风格的图像域, 和 是两种不同风格相互进行迁移的转换器, 和 为判别器。域的图像会通过 生成与 域类似的图像 ,由 来判别图像的真假。同样的, 域的图像通过 生成与 域类似的图像 ,由 来判别图像的真假。该方法提出了循环一致性损失约束CycleGAN。为了保证生成器和判别器维持对抗训练,对抗损失如式(3)所示。
式(3)中的对抗损失保证了G和F生成样本符合不同域的风格,而无法保证两种图像之间的内容相同。的提出解决了这一问题。如式(4)所示。
与 共同构成了CycleGAN的损失函数,保证了两种不同风格样本迁移的质量。总的优化函数如式(5)所示。
虽然CycleGAN使两个域中的样本在高维空间中相似,但循环机制会导致信息的丢失。
2.3.3 Wasserstein-生成对抗网络(WGAN)
由于GAN使用JS距离来度量生成样本分布与原始样本分布之间的差别,原始GAN面临着两大难题,分别为梯度消失和模式崩溃。WGAN[8]改用Wasserstein距离替代JS距离对两者的分布度量。Wasserstein距离与JS距离相比,主要有两点优势:(1)Wasserstein距离能够更好的判断不同分布的重叠程度。(2)Wasserstein距离可以获得有意义的梯度,在求导过程中更有优势。Wasserstein距离度量两个分布之间的差距可以用式(6)来表示。
式中,函数 的Lipschitz常数记为K, 常利用神经网络模拟。WGAN保证了训练样本的丰富性,解决了GAN的训练难题。
2.3.4 生成对抗模仿学习(GAIL)
Ho等[9]提出了一种深度强化学习方法GAIL,该方法将GAN与模仿学习结合,其思想是将GAN的生成器看作一个动作序列的生成器,将生成的动作序列作为专家行为的模仿,这种策略被称为反向强化学习(Inverse Reinforcement Learning)。其中,强化学习的优化目标如式(7)所示。
在式(7)中, 代表了策略 的熵正则, 的值越高意味着当前状态下的奖励值越大。代表了由专家行为策略所产生的收益,GAIL通过预训练的判别器替代了原有的奖励机制。GAIL的具体框架图如图5所示。
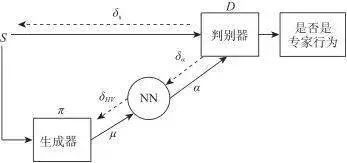
图5 模仿学习生成对抗网络模型
在图5中,生成器生成的动作序列与专家行为相似,并以判别器的判断替代强化学习中奖励函数,是对强化学习的一种延伸。
2.3.5 序列生成对抗网络(SeqGAN)
SeqGAN[10]是GAN与强化学习结合的又一成功案例,主要被用于自然语言处理上。在SeqGAN出现之前,GAN对于离散数据的判别结果无法为生成器提供有效梯度。SeqGAN采用了强化学习训练生成器解决了这一难题,其结构如图6所示。
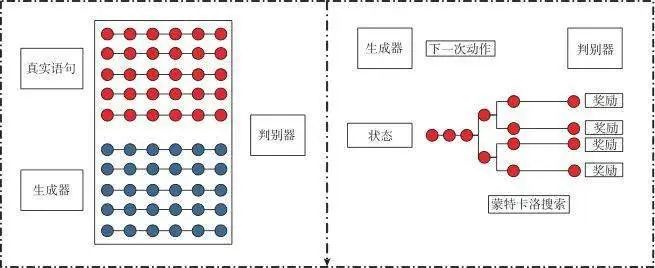
图6 序列生成对抗网络模型
在图6中,SeqGAN的训练步骤主要分成两步,首先,通过真实世界的语句和生成的虚假语句来训练判别器,使判别器具有分辨真假语句的能力。接着,在语句生成的过程中,通过蒙特卡洛树搜索 (Monte Carlo Tree Search,MCTS)将语句中缺少的词语补齐。最后,生成器将会生成多个完整的语句序列,再使用训练好的判别器对每一个语句序列打分,得到语句序列的奖励值,通过奖励值计算梯度更新生成器网络。
2.3.6 时空预测生成对抗网络(GAN-LSTM)
在许多实际问题上,需要处理的数据表现出了序列化的特征,如卫星云图、环境变化等。Xu等[11]提出了一种将LSTM网络与GAN结合的方法,用于预测卫星云图中未来时刻的图像。其具体的模型框架如图7所示。
2.3.7 多尺度梯度生成对抗网络(MSG-GAN)
众所周知,GAN在训练过程中难以适应不同数据集的原因是因为其在训练过程中存在不稳定性,并且梯度的缺失导致难以学习到有效的数据分布。MSG-GAN[12]允许使用多个不同尺度的梯度,从鉴别器回传到生成器当中来解决这一问题。
该模型的生成器生成图像的过程可以看作是潜在变量 反向卷积生成图像的分解步骤,而每一层生成的图像都会使用对应清晰度图像的判别器进行判别,使计算的梯度最简单有效传播回生成器中。该模型不仅解决了GAN中梯度无效的问题,并且能够生成比原始GAN生成图像清晰度更高的图像。其模型的结构如图8所示。
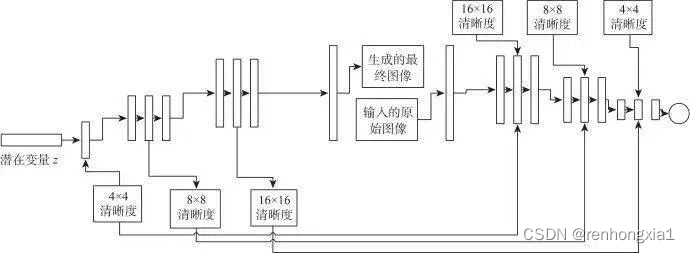
图8 多尺度梯度生成对抗网络模型
2.3.8 可解释生成对抗网络(Interpretable GAN)
GAN以其强大的学习能力和生成能力闻名于世,而其可解释性的缺失对于研究者而言是一重大难题。在最新的研究中,Interpretable GAN[13]帮助GAN通过操纵神经网络层中不同卷积核的特征图来修改生成图像上的指定视觉概念,为GAN生成图像的可解释性研究提供了一个新思路。
3 GAN在无人系统领域的运用现状

表 1 GAN的在无人系统领域的应用T
3.1 GAN在智能感知上的应用
3.1.1 目标检测
UAV对于电力输电线路上的绝缘子目标检测是电力巡检任务的重要目标,关系到输电线路网络的可靠性和安全性。王德文等[15]提出了一种基于WGAN的图片去模糊绝缘子目标检测方法,该方法将模糊图片作为生成器的输入,生成器将根据绝缘子的相关性特征生成清晰的图片,判别器将判别绝缘子图片的真实来源,最后提高了Faster-RCNN 目标检测算法对绝缘子目标的检测准确度。
3.2 GAN在智能判断上的应用
在UGV、UAV等无人系统平台中,精确、快速地对现有系统运行的背景环境、周围目标的行为和自身运行状态等信息进行判断,是无人系统进行下一步决策与行动的基础。本节主要介绍了GAN在无人系统的外部态势预测、内部态势预测、人类行为判断上的应用,阐述了其强化无人系统分析自身及外界环境信息的能力。
3.2.1 外部态势预测
无人系统的外部态势预测包括对未知外部态势情况的判断、预测、理解,是无人系统进行下一步决策与行动的前提。智能化的无人系统在做出下一步的决策前,应当通过启发式算法预测即将出现的场景和态势,并以此作为判断下一步行动是否有效的标准。
为了对环境感知中出现的图像进行细节增强,规避气候、污染等因素对图像造成的影响,戴雪瑞等[22]提出了一种多尺度级联的金字塔生成对抗网络(Multi-scale Cascaded Pyramids Generate Adversarial Networks,CPGAN)。与MSG-GAN类似,CPGAN采用多尺度梯度图像梯度进行联合训练,生成器把可见光图像转化为红外热图像,判别器用于区分两种图像之间的区别。最终,CPGAN生成了包含丰富细节的红外热图像。范佳琦[23]等针对现有场景预测任务中可用样本较少的问题,提出使用CycleGAN将原始天气环境为晴天的样本转换成雨天、黑夜、雪天等不同天气场景下的样本,并对原始的数据集进行扩充,改善了无人系统环境感知的训练过程。
自动驾驶汽车总是在复杂、不确定的路况环境中行驶。因此,无人系统需要对驾驶的场景和路径进行预测。Ghosh等[24]提出了SAD-GAN。该模型以DCGAN作为模型的基本框架,将当前时间 获取到的场景图像作为输入,快速学习到图像中的特征,将 时刻的场景作为生成器的输出。SAD-GAN旨在对驾驶场景进行预测,并且在视频游戏Road rash上验证了模型的准确性。
3.2.2 内部状态评估
在无人系统执行任务的过程中,无人系统会收集大量与内部运行状态有关的参数,这些数据被用于无人系统对于当前内部自身状态的判断和检测中。王凤芹等[25]提出了一种LSTM-GAN的变体方法来支持无人飞行器的异常检测,这种算法利用LSTM神经网络对飞行数据的时序特征进行采集,GAN框架被用来训练并且判断当前是否处于飞行异常状态。从实验结果来看,LSTM-GAN提高了UAV飞行数据异常的检测能力,是GAN在无人系统数据分析上的成功应用。
无人系统集群在执行任务过程中需要对内部所有无人系统节点的安全性和稳定性做出判断,因此其数据通信至关重要。在UAV通信领域,由于传统的通信传输方式无法对大量的原始数据以无损的方式传输,因此无人系统的通信方式一直在更新换代。牟迪等[26]提出了一种基于CGAN的UAV智能光通信方法。该方法可以模拟真实的信道传输,改善无人系统的通信性能。在训练过程中,数据发生器充当生成器不断生成类似于真实信道输出的样本,判别器则被用来判断样本是否来自于真实的信道输出。实验证明,CGAN改善了无人系统数据传输的质量,具有前瞻性。
3.2.3 人的行为判断
由于人类的运动轨迹本质上是一组自然的序列数据,拥有时序特征。GAN有助于无人系统判定人类运动轨迹。欧阳俊等[27]提出了一种基于LSTM网络与GAN模型的行人轨迹预测模型GI-GAN。该模型在GAN-LSTM的基础上引入了双注意力机制模块,分别统计行人的个体行为信息和群体交互信息,极大地提高了轨迹预测的精度。田龙伟等[28]将场景、路人行为等信息进行编码作为GAN的输入,将生成器生成的路径作为在不同场景下路人行为的重要参考。通过对行人所处的物理环境和相对位置进行分析,判别器准确地预测了行人的运动轨迹,同时提高了预测精度。
3.3 GAN在智能决策上的应用
自主决策能力决定了无人系统的智能化水平,是无人系统自主性技术的重要组成。本节阐述了GAN在无人系统决策上的应用,突出了其在强化学习领域的衍生和增强作用。
3.3.1 GAN通过博弈对抗进行决策
在对抗博弈的环境中,UAV的飞行态势数据容易产生缺失,这对于后续UAV的决策规划会产生一定的影响。刘小峰等[29]提出了利用现有的人类专家经验对模型进行训练,借鉴已有的无人对抗决策数据,生成UAV的对抗博弈决策。该方法将GAIL结合到决策生成方法中,借鉴专家经验,学习更有效的博弈对抗策略。在训练中,GAIL将对UAV的决策过程进行指导,其中将UAV的感知态势信息输入到生成器中生成预测的UAV行为策略序列,判别器判断预测的行为策略序列与专家提出的行为策略序列之间是否有差别。最终,生成器将输出与专家行为策略一致的预测行为策略,完成决策任务。
在自动驾驶的决策中,优先驾驶路径是避免UGV发生事故的重要手段之一,UGV可以利用GAN对其违规检测行为进行规避。曹轩豪等[30]提出将专家在行驶过程中的决策路径作为GAN的训练数据,将行驶过程中GAN生成的路径作为实际驾驶过程中的路径参考。
3.3.2 GAN在决策控制上的应用
在UGV平台上,先进辅助驾驶系统(Advanced Driver Assistance System,ADDAS)具有重要作用。ADDAS系统利用安装在UGV平台上的多种不同传感器,在一定的时间内收集车内外的环境特征、异常状况等重要参数,以便UGV可以在极短的时间内反应并提前做出决策。ADDAS系统面临着复杂突变的环境挑战,而现有的基于模仿学习的智能体决策方法无法应对此种挑战。岳泊暄等[31]提出了一种基于CGAN和GAIL的文本边界增强GAN模型,该模型的控制决策方法主要分为三个部分:(1)引入文本学习网络模块通过RNN学习与交通法规有关的文本表示特征。(2)将GAIL模型中的GAN模块改变为交通法规相关的CGAN模块,使GAIL输出符合交通法规的决策行为序列。(3)改进训练方法,使得文本特征网络可以更新GAIL的网络参数。
3.4 GAN在人机交互上的应用
无人系统并非完全独立,其执行任务的过程离不开操作员的指挥与控制,因此无人系统与人的交互是无人系统智能化的重要方向之一。操作员通过语音的方式对无人系统输出指令,无人系统需要判断指令的内容并且做出回应,该方向涉及自然语言、语音处理等技术。本节从GAN在无人系统自然语言处理和理解、语音处理等方面的应用,讨论了GAN在无人系统人机交互上表现出的潜力。
3.4.1 自动问答
自动问答是操作员/无人系统的用户同无人系统进行人机交互的重要应用之一。GAN的对抗性策略为研究者们提供了优化人机交互设计的思路。Li等[32]参考了SeqGAN的思想,提出了NDGAN。与SeqGAN类似,将GAN中的判别器作为奖励函数,用于判断人与机器的话之间的差距,并且将其作为强化学习中的奖励。模型通过模仿学习和对抗训练对人类的对话进行模仿。实验证明,GAN可以帮助机器理解人类的对话含义。
由于无人系统长期在复杂、多变的环境中工作,因此自动问答的过程中需要对语音指令进行降噪处理。徐轩等[33]提出了一种基于自动编码器和GAN的智能语音降噪方法AEWGAN,该模型在训练阶段将真实状态下的纯净语音加入噪声,目的是使GAN中的判别器拥有判别纯净语音和噪声语音的能力。AEWGAN是WGAN的衍生,可以更好地度量真实样本和生成样本的分布差异。该模型的生成器对噪声语音进行编码和解码操作生成纯净语音。这项工作直接被应用在人群噪声、加性高斯白噪声、餐厅内嘈杂噪声、工厂噪声等数据集上,来模拟服务机器人可能面临的真实噪声环境。
3.4.2 自然语言理解
机器翻译是无人系统理解操作员/无人系统的用户简单口令的重要手段。BRCSGAN[34]引入了强化学习进行对抗训练,判别器判断机器翻译与人为翻译句子之间的差异,生成器生成与人类翻译相似的目标句子,模型引入了BLEU静态损失函数对生成器进行强化学习训练。
4 GAN在无人系统领域的应用展望
目前,无人系统的人工智能技术水平不足,无法在多元、复杂的任务环境下正常运行。切合无人系统共性技术的发展趋势,GAN在无人系统的智能化发展方向主要有三个方面:
-
(1)单体无人系统的智能化程度需要不断提高,利用以GAN为主要框架的人工智能算法进一步提升“观察Observation、判断Orientation、决策Decision、执行Action”(OODA)回路的执行速度和自主化水平。
-
(2)利用GAN与强化学习的结合,通过专家行为决策的训练,提高群体无人系统的智能决策水平,增强个体无人系统的协同能力,推动无人系统由个体智能转变为群体智能。
-
(3)提高人机协同智能化水平。本节将从无人系统的共性技术角度出发,探讨GAN在无人系统上的应用趋势。具体内容如表2所示。
4.1 GAN可增强单体智能
无论是在军用还是民用UAV的无人系统中,其自我决策、自我管理能力的提高都是其智能化的标志。已经有不少研究者利用深度强化学习提高UAV在特殊环境下的飞行适应能力[36]。而基于SeqGAN的方法可以增强强化学习的合理性,避免强化学习人为设置奖励函数的弊端。
4.2 GAN可提升群体智能
无人系统由个体智能向群体智能转变是未来无人系统发展的趋势。例如,在军事方面,UAV 的“蜂群”作战逐渐成为主流的作战方式。与传统UAV执行察打任务相比,“蜂群”作战具有多能多元的特点。另一方面,UAV “蜂群”需要无人系统具备群体的自主态势感知、指挥控制、智能决策等能力,这些智能技术与人类专家行为的学习密不可分。GAIL将GAN与模仿学习相结合,从大量的人类行为决策中学习专家知识,为智能体的后续决策提供参考。可以将基于GAIL的智能决策方法应用到UAV “蜂群”的决策中,GAN与强化学习的结合可为无人系统的群体智能化算法提供新思路。
无人系统群体智能还需要各单体无人系统间相互通信,这要求无人系统集群拥有庞大的通信网络和快速、高效的通信能力。GAN常被用于网络故障检测[37]、通信方式优化等方向上,这对于未来无人系统集群的智能化通信算法具有启发作用。
4.3 GAN助力人机混合智能
无人系统的人机协同技术需要向人机融合、智能协同的方向迈进。在军用无人系统中,UAV并不能完全替代有人机,指挥员需要作为战场管理者,在一定战场空域对整个战略行动进行监督和控制,并且对UAV群实施计算、信息、指令等战术部署。因此,无人系统在人机交互、指令理解方面有智能化的需求。
GAN通过对人类专家语料库的大量学习,提高了智能体在自然语言处理、自然语言理解上的能力,这对于无人系统的人机交互、人机沟通等能力的提高具有积极的意义。
5 结束语
鉴于无人系统在军用和民用领域展现出的巨大应用价值,无人系统的智能化和自主化发展得到了世界范围内各个国家和组织的广泛关注。GAN作为一种强大的生成式模型,在无人系统的智能化和自主化进程中起到了重要作用。本文针对目前应用在人工智能领域的模型,如MSGGAN、DCGAN、SeqGAN等主流GAN模型作了综述。基于此,进一步介绍了目前被广泛应用在无人系统的智能感知、智能判断、智能决策、人机交互等方向上的GAN技术。同时,结合无人系统共性技术的发展趋势,对未来GAN模型在无人系统上的应用提出了一些设想:
-
(1)GAN可增强单体智能。GAN与不同的深度学习模型,如深度强化学习、深度卷积神经网络相结合,可以有效提高它们的性能和训练质量。未来可以针对具体的任务目标,将GAN应用在单体智能的决策学习、图像补全等方面。
-
(2)GAN可提升群体智能。在军事方面,以无人机“蜂群”为代表的无人系统集群逐渐成为主流的作战方式。如何提高无人系统集群的自主态势感知、指挥控制、智能决策等能力是现在的研究热点。GAN在模仿学习、网络故障检测等领域的应用可以对无人系统集群的群体智能涌现提供启发。
-
(3)GAN助力人机混合智能。人机协同技术是无人系统的重要研究方向。而现有的人机协同技术还存在人机难以进行交互、指令难以理解等问题,而GAN在语音增强、自然语言理解等领域的发展非常完善。因此,使用GAN提升无人系统的人机混合智能研究具有非常重要的意义。
本文仅用于学习交流,如有侵权,请联系删除 !!
加V “人工智能技术与咨询” 了解更多资讯!!