官方方式(22.04、 20.04、 18.04、 16.04)
官方安装步骤:
0: humble/ Ubuntu 22.04
https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debians.html
1: noetic / Ubuntu 20.04
http://wiki.ros.org/noetic/Installation/Ubuntu
2: melodic / Ubuntu 18.04
http://wiki.ros.org/melodic/Installation/Ubuntu
3: kinetic / Ubuntu 16.04
http://wiki.ros.org/kinetic/Installation/Ubuntu
问题解惑
配置密钥时出现:gpg: no valid OpenPGP data found.
rosdep初始时出现:rosdep init 连接超时的问题
本地方式 ubuntu(20.04) 配置 ros(noetic) 系统
一、系统准备阶段
首先需要一个ubuntu系统(16.04、18.04、20.04、22.04),可以物理安装,也可虚拟机安装(VMware),在装系统过程自行 csdn 或 百度,这楼里不做说明。
二、ros的安装配置
# 配置源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 配置访问密钥
wget http://packages.ros.org/ros.key
sudo apt-key add ros.key
sudo apt-get update --fix-missing
# 安装 ros
sudo apt install ros-noetic-desktop-full
三、ros 环境参数配置
为了每次都自动激活ros环境,我们将命令 “source /opt/ros/noetic/setup.bash” 添加到 ~/.bashrc
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
运行roscore,检查前面的步骤是否成功
roscore
四、rosdep 初始化
ros依赖包工具rosdep 初始化,方便安装第三方包
# rosdep 依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
# rosdep 初始化(如果无法连接查看上方 问题解惑)
sudo rosdep init
rosdep update
五、ros应用商店apt源(简单使用)
网址:
https://index.ros.org/
https://index.ros.org/packages/
终端1:开启ros
roscore
终端2:安装并运行ros包(小乌龟)
sudo apt install ros-noetic-turtlesim
rosrun turtlesim turtlesim_node
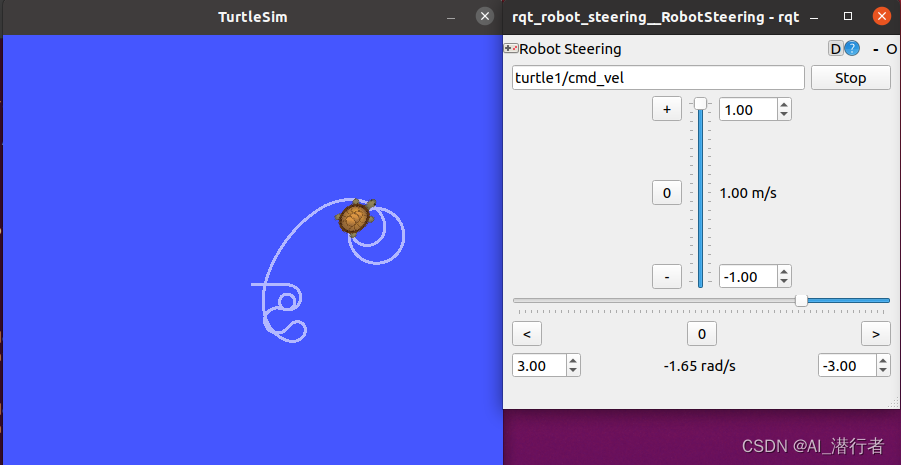
终端3:安装并运行ros包(rqt_robot_steering)
sudo apt install ros-noetic-rqt-robot-steering
rosrun rqt_robot_steering rqt_robot_steering
将 rqt_robot_steering 窗口下的目录改为 turtle1/cmd_vel,然后就可以拖动 slider 了
六、ros源码包编译(github)(既可学习、又可修改)
零、配置 catkin 工作空间
cd ~
mkdir catkin_ws # 目录名可变
cd catkin_ws
mkdir src
一、首先进入ros包网站 ( https://index.ros.org )
二、寻找自己想要的包(这里假设是 turtlrsim 小乌龟)

三、点进去找到 源码网址(Checkout URI)
cd ~/catkin_ws/src
git clone [email protected]:ros/ros_tutorials.git
cd ~/catkin_ws # 进入catkin工作空间
catkin_make # 编译源代码
source ~/catkin_ws/devel/setup.bash # 环境参数设置到当前终端(可以将这句添加到.bashrc)
终端0:(开启ros核心)
roscore
终端1:(执行编译好的 ros 包)
rosrun turtlesim turtlesim_node
本地方式 ubuntu(18.04) 配置 ros(melodic) 系统
1.配置软件库(可选)
2.配置安装ros
# 1.设置安装源,设置代理源,如清华源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 2.设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 3.更新软件包
sudo apt update
# 4.安装ROS melodic
sudo apt-get install ros-melodic-desktop-full
# 初始化rosdep(如果无法连接查看上方 问题解惑)
sudo rosdep init
rosdep update
3.激活ros环境(如 catkin工具)
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
本地方式 ubuntu(16.04) 配置 ros(kinetic) 系统
1.配置软件库(可选)
打开Ubuntu系统的软件中心,点击软件和更新。确认下述窗口中的前四个选项已被勾选。

2.配置安装ros
# 添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
# 添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
# 安装ROS
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full
# 初始化rosdep(如果无法连接查看上方 问题解惑)
sudo rosdep init
rosdep update
3.激活ros环境(如catkin工具)
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc