目录
第一章介绍了在相对速度为0时候的雷达测距原理,第二章介绍了基于LFM的雷达测距原理及其实现,但是存在相对运动时,无法得到目标物体的多普勒信息,进而无法计算目标物体的速度。本章将在第二章的基础上,实现连续LFM波形的雷达测距测速。
该笔记参考资料:Radar测距及测速原理(2)——快速Chirp序列方法推导及实际应用 - 知乎 (zhihu.com)![]() https://zhuanlan.zhihu.com/p/77500626
https://zhuanlan.zhihu.com/p/77500626
1. LFM测速
1.1 雷达测速原理
通常来说,我们可以通过确定电磁波传播的时间来估算距离,通过多普勒效应产生的频率偏移来估算相对速度。但实际使用中我们会发现,对于没有经过调制的连续波谱(Continuous Wave),我们只发出相同的正弦或余弦信号,接收到的波也是呈周期性变化的,所以我们无从知道从发出到接受到底经过了多少个波长,从而无法确定信号从发出到接受所经历的时间(time of flight),也就无法测算距离。
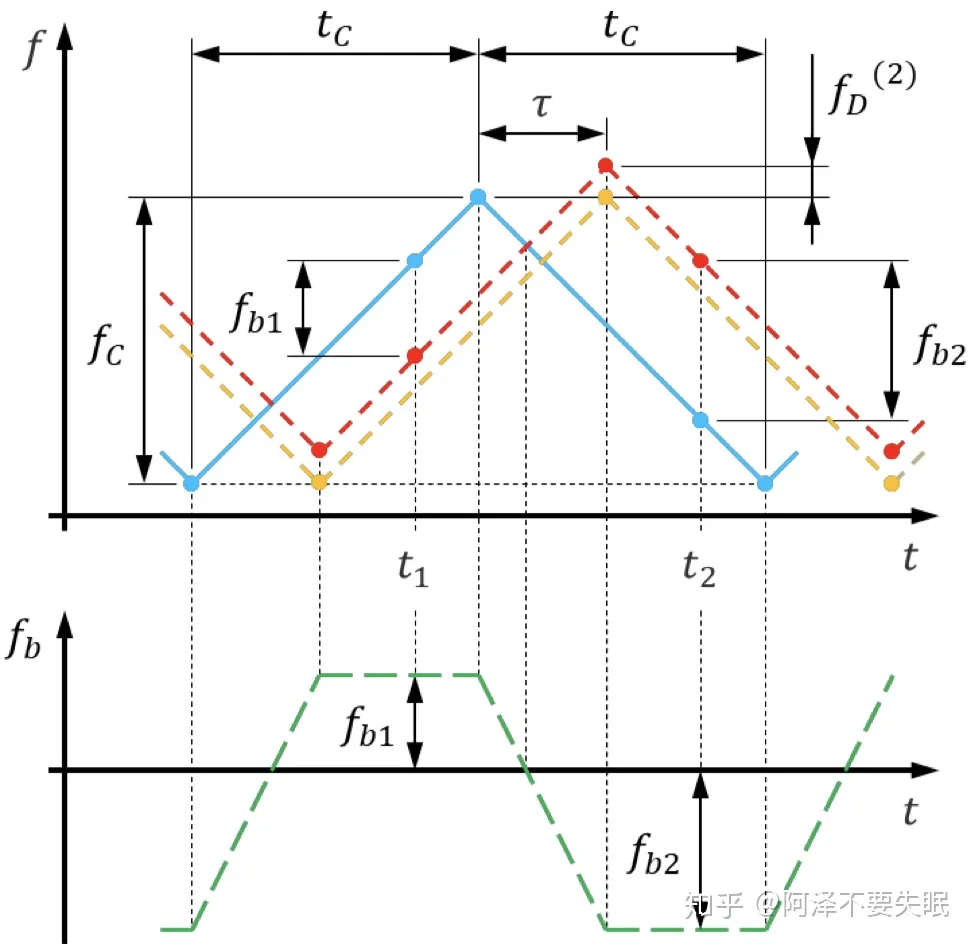
于是,我们引入了线性调频LFM,使发出信号的频率随时间处于不断的变化中。LFM雷达在扫频周期内发射频率变化的连续波,被物体反射后的回波与发射信号有一定的频率差,通过测量频率差可以获得目标与雷达之间的距离信息。
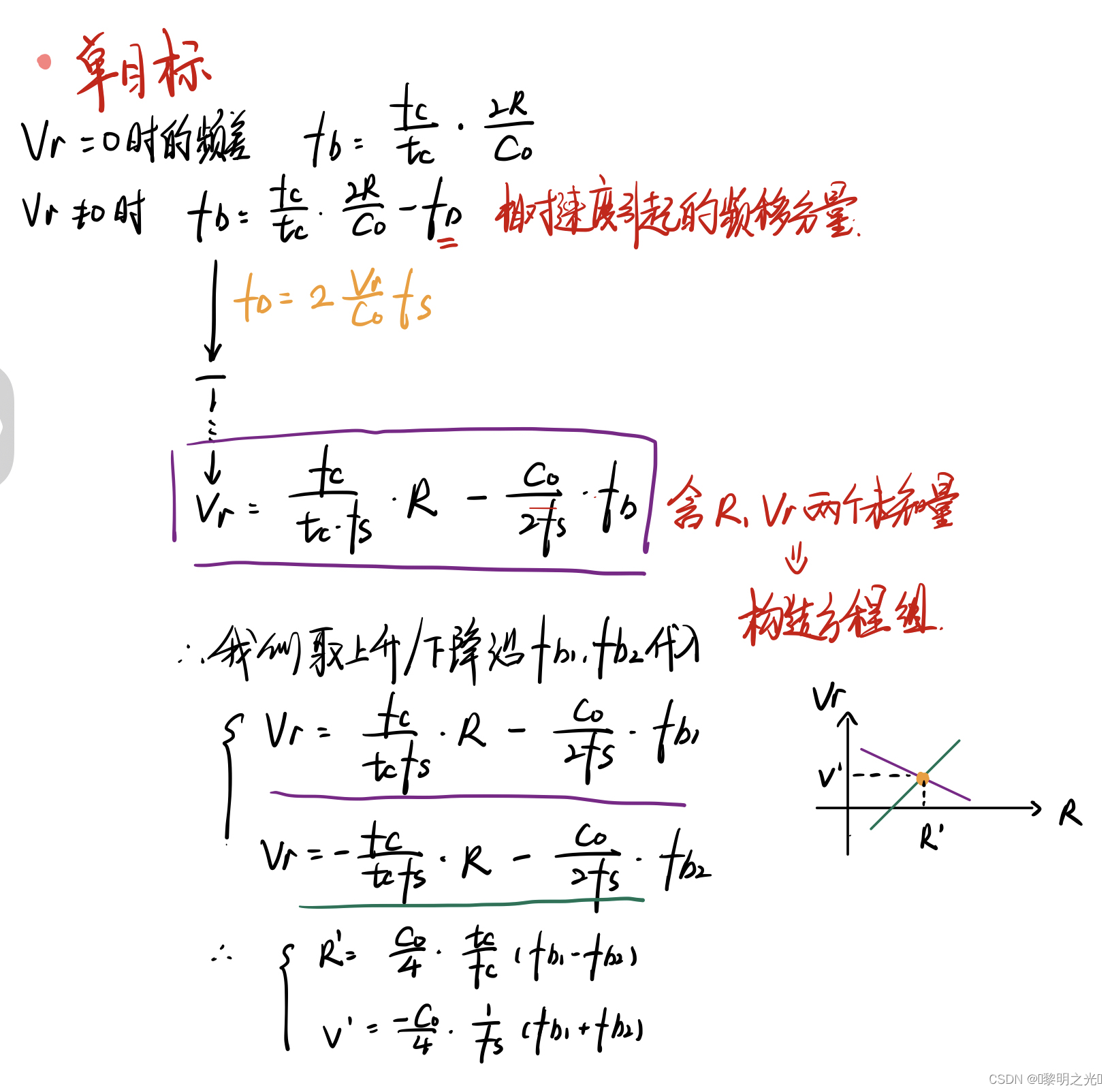
第一章讨论了相对速度为0的情况,现考虑存在相对运动速度,当存在相对速度(正值表示远离,负值表示靠近),距离R会随着时间进行变化,当相对速度
,R不断增大,故
也不断变大;当相对速度
,R不断减小,故
也不断减小。因此当目标物同观测点有相对运动时,多普勒频偏也要放在考虑之中,发出及接受的信号频率变化变成如下图所示:
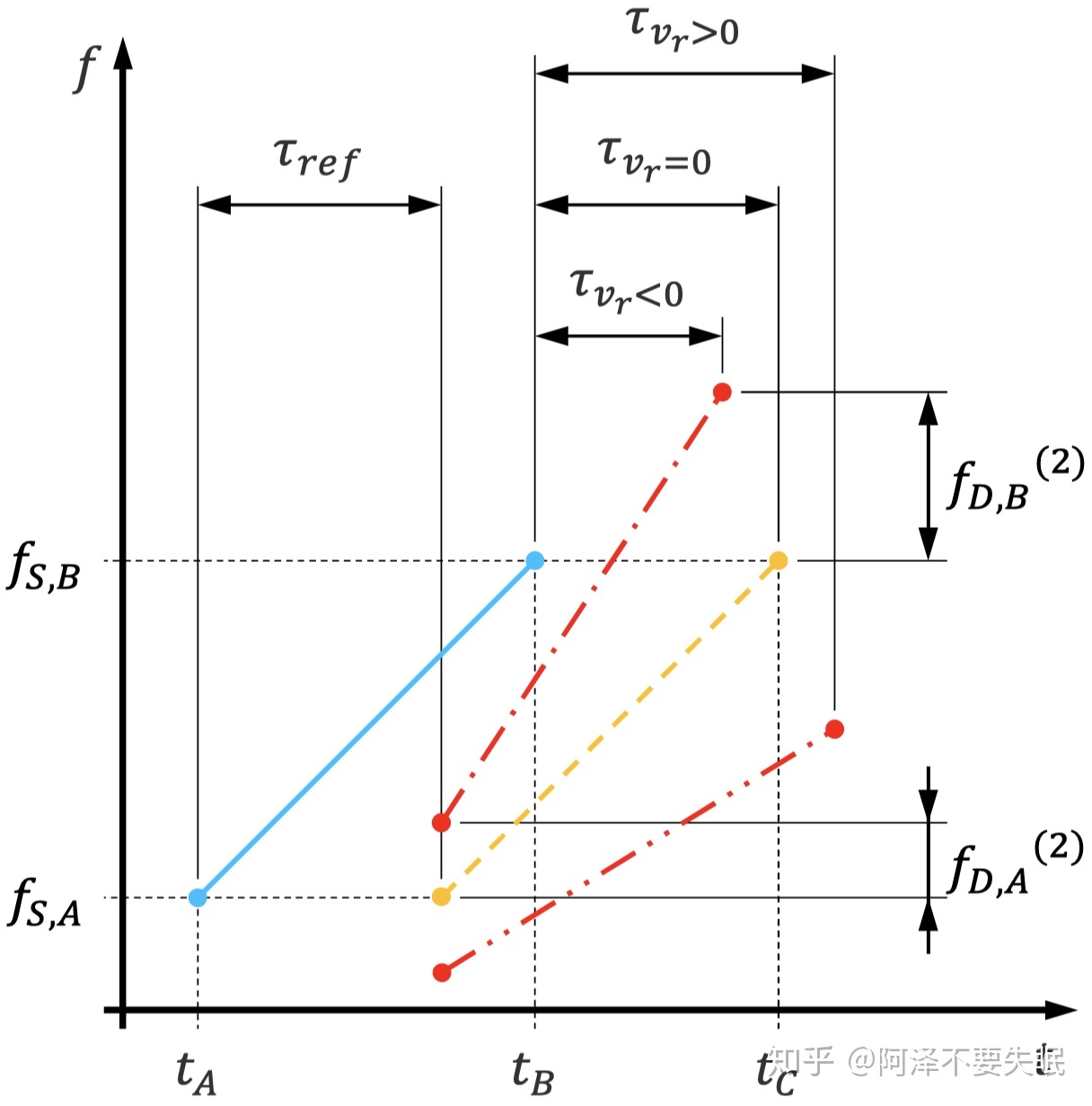
为了简化模型,且考虑到信号从发出到接收所经历的时间极短,加速度不变,目标物体相对速度几乎不变,信号频率变化如下所示:
蓝色表示原始发射波形,虚线的红黄两线表示接收到的不同回波信号,因为目标物体存在相对速度,接收到的回波信号在原始信号的基础上不但右移(时延)如黄虚线所示,同时存在上下移动(频移)如红虚线所示,具体解释如下:
1.2 Chrip信号测速
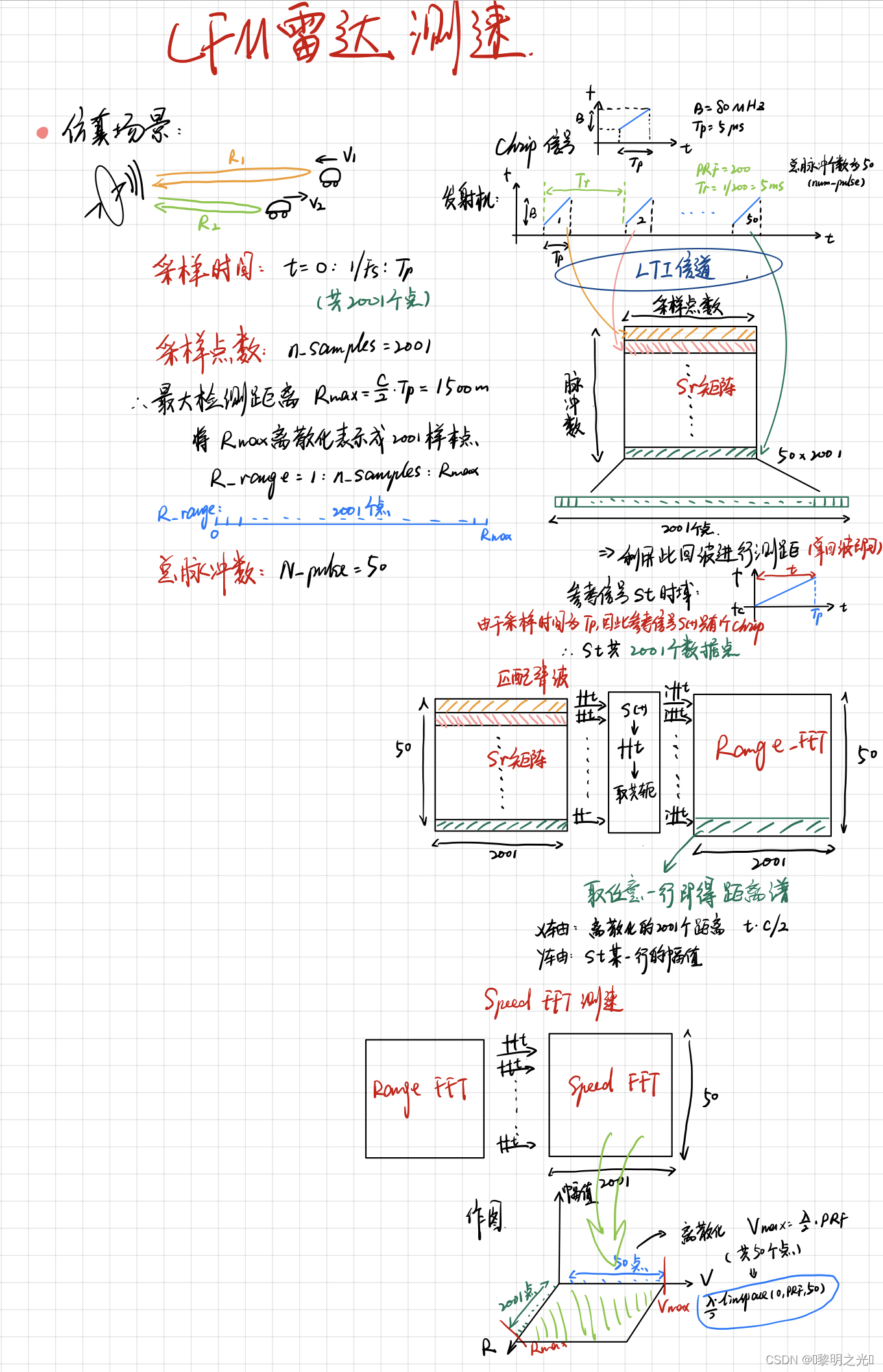
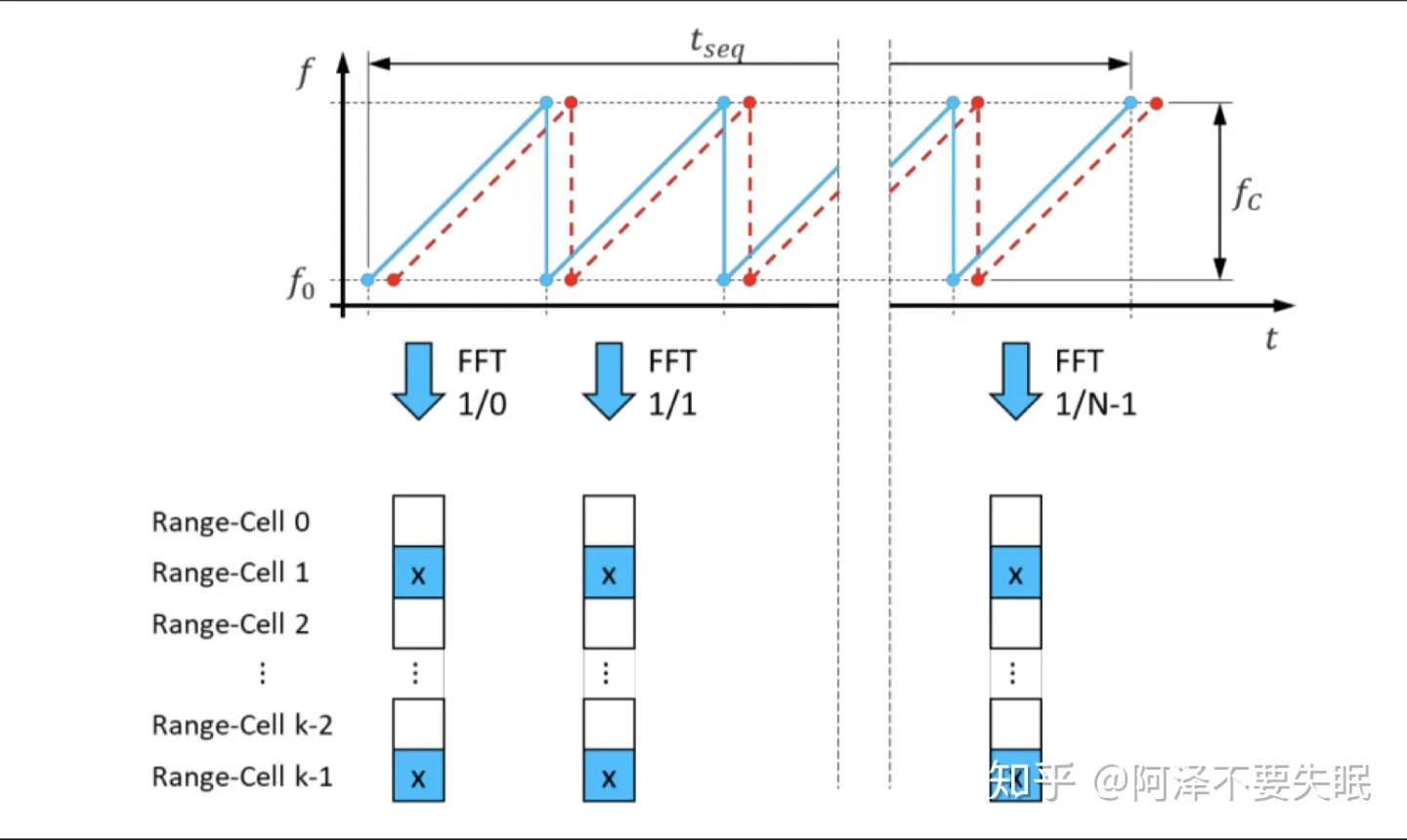
结合第一章节以及本章前面内容,雷达测距测速的基本原理相信各位已经明白,现在将基本原理与LFM相结合,通过缩短每一个Chrip信号的频扫时间,使得在每一个Chrip时间内,相对速度基本保持不变(降低相对速度带来的影响)。此时,可以将每一个Chrip信号看成一个准静态情况(一个Chirp中相对速度为0,相对距离R不变,从而不考虑多普勒效应),从而比较容易的确定一个Chirp中的相对距离R。但是因为视为准静态过程,我们无从得知相对速度的值,因此,我们需要发出很多个连续相同的Chirp(Chirp序列)来确定相对速度,如下图:
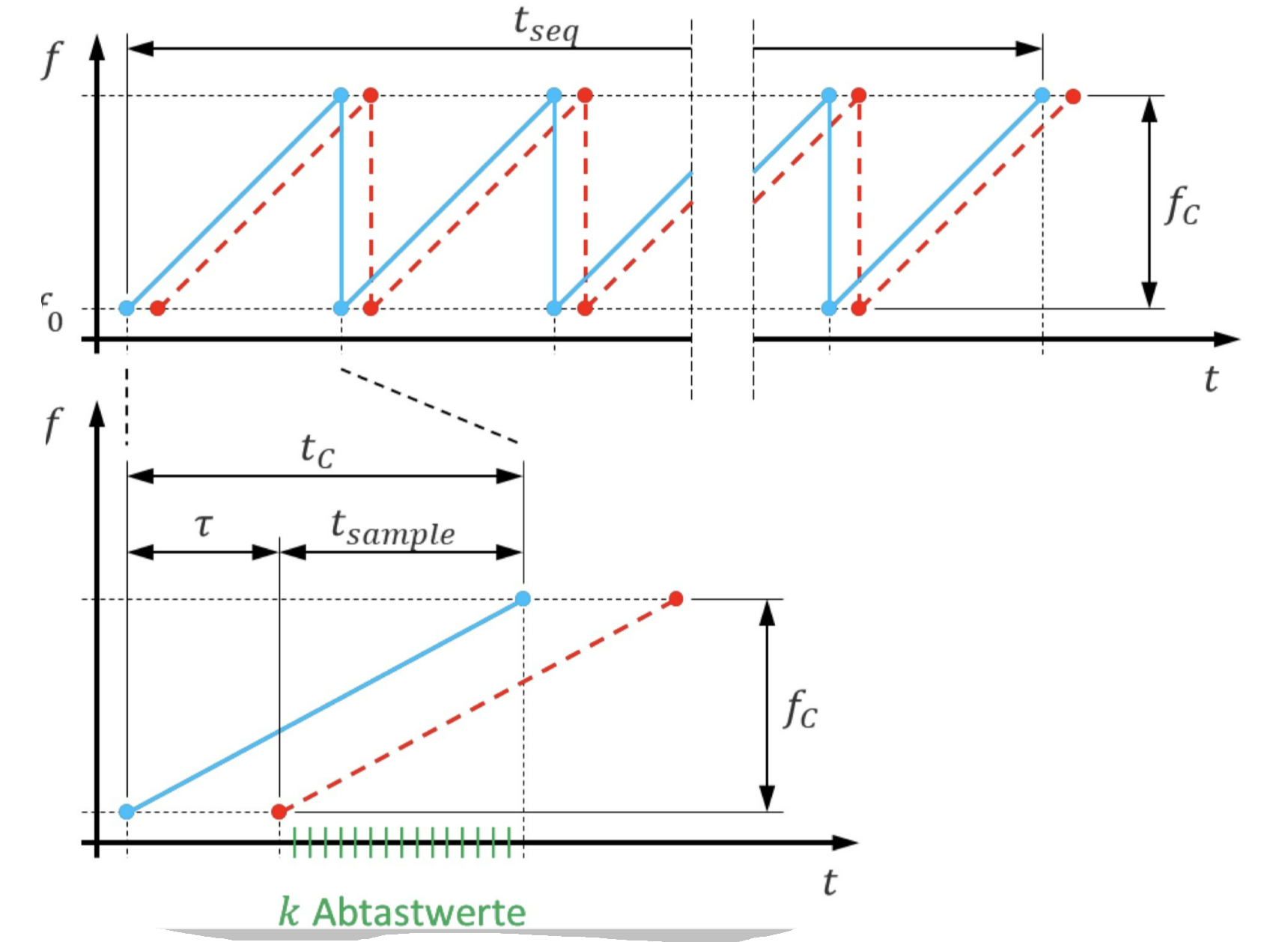
如图所示,很多个Chirp组成了一个”Sequence“,总时间用 表示。在每个Chirp中,相对距离R被视为定值,因此,在一个Chirp序列中,R是以离散值表示出来的,每一个Chirp给出一个R,这里将离散的相对距离序列称为Range Cells。我们假设总共发出N个相同Chirp,那么从第0到第N-1个Chirp的扫频周期及扫频带宽相等均为
和
。
为了得到每个Chirp的相对距离R,我们首先要得到每个Chirp中的差频(beat frequency),因此,我们将每一个Chirp进行采样,共得到k个采样值。利用快速傅里叶变换(FFT)得出每个Chirp中的值,从而得到相对距离R。因为这里的FFT之后得到的是距离,所以在这里称为“Range-FFT"。经过FFT后,对于每个Chirp我们得都到了k个频点(frequency bins),其也对应着测量相对距离R的分辨率。
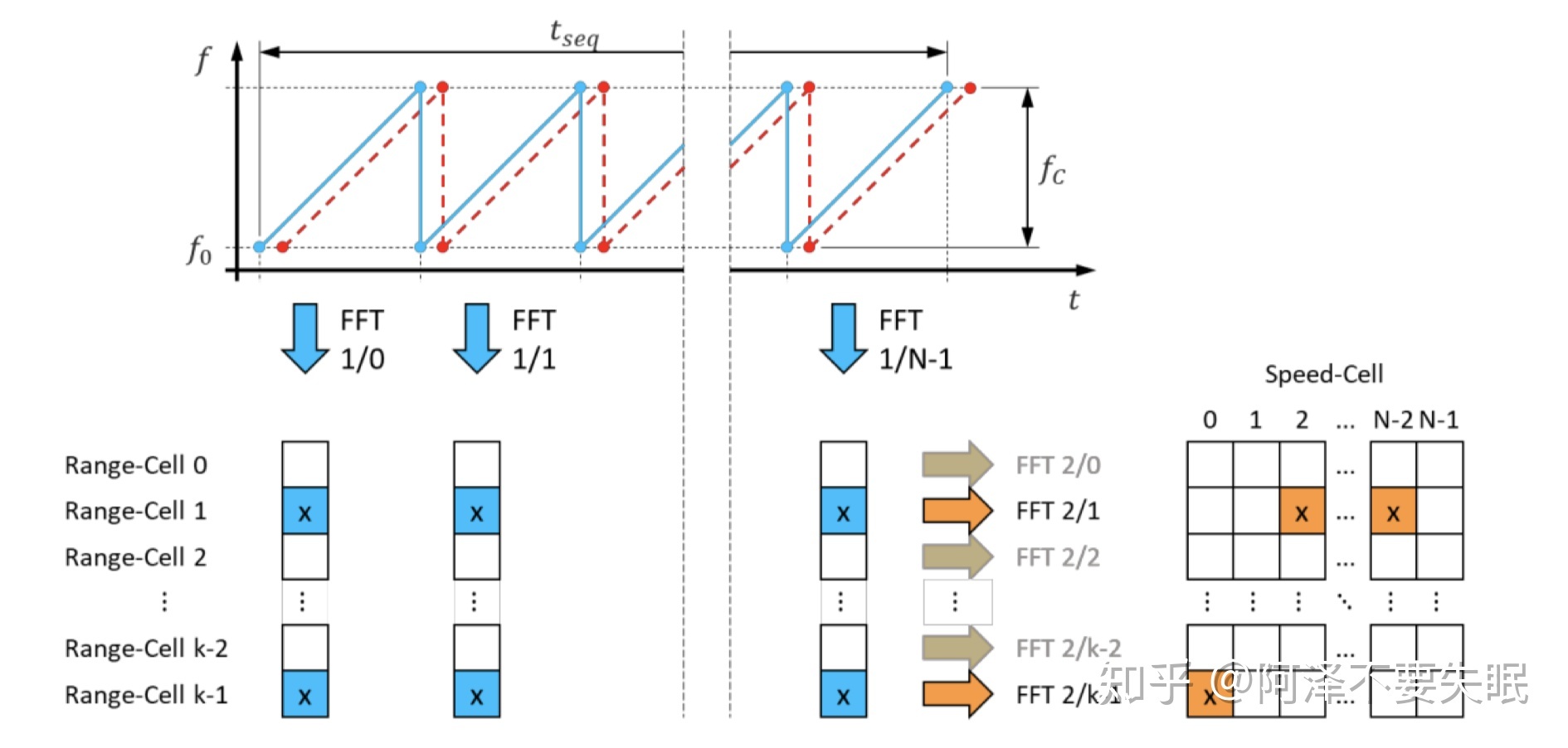
由于在一个测量序列中,经历的时间较短,我们假设其相对速度是不变的,不存在加速度。并且,相对速度可由R的变化求出,而R又可以由差频得到,因此,我们就可以利用上一步Range-FFT得出的一个序列中各个Chirp的
的变化来求相对速度。
在上一步中,由FFT得到的是一个复数,由于
极短,所以
的变化也很小,从而不足以使得不同Chirp得到的相对距离R跳跃到不同的Range cells中(FFT后,幅值最大的序号不变),但其变化还是存在的。其结果可以在复频域中表示出来:在一个测量序列中,
在复频域中旋转,其旋转的频率即为相对速度
的标尺!对
再进行FFT,可以得到其变化的频率,从而得到相对速度。因为这里的FFT之后得到的是相对速度,所以我们这里称为“Speed-FFT”
由于每个Chirp可以得到一个相对距离R,所以相对距离的分辨率为:
而在一个序列中我们假设相对速度不变,因此相对速度的分辨率为:
注意:公式中各个物理量的表示可能与我们仿真所使用到的表示不同,如在仿真中用带宽表示。
2. LFM测速代码实现
-
参数设置
| 参数设置 | 参数含义 |
| fc | 载波频率4GHz |
| Fs | 采样率为200MHz(USRP最大采样率受限) |
| Ts | 采样周期Ts=1/FS=5ns |
| B | B=0.4Fs=80MHz(满足奈奎斯特带宽) |
| Tp | 一个Chrip信号的时宽10us,Tp=10e-6 |
| c | 光速,设置为3e8 |
| PRF | 每秒脉冲重复频率为200 |
| Tr | 脉冲重复周期等于1/PRF=5ms |
| lamda | 波长等于光速/载波频率=75cm(厘米波波段) |
| Rmax | 受到采样时间的限制Rmax = c/2*16*t,t为采样时间 |
| R_resolution | 距离分辨率=光速/两倍波长=c/(2B)=1.875m |
| N_pulse | 发射脉冲个数num_pulse=50 |
| t | 采样时间t = 0:1/Fs:Tp,采样时间,会决定最大检测距离 |
| N_samples | 采样点数N_samples=N_time/Fs |
-
仿真图像
| 第一个回波信号的距离幅度谱 测距(Range FFT) |
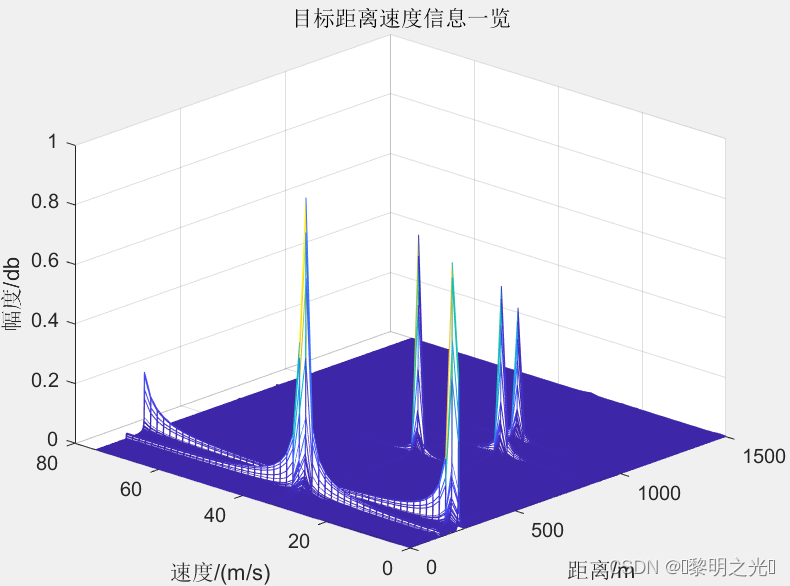
测距测速三维图像 |
 |
 |
-
matlab源码
%==========================================================================
%% 连续脉冲LFM雷达测距测速
%% 完美实现,没有bug
% matlab2021b
%==========================================================================
clear;clc;close all;
%% LFM参数设置
fc = 4e9; %载波频率
PRF = 2000; %脉冲重复频率
Tr = 1/PRF; %脉冲重复周期
B = 80e6; %带宽
Fs = 2.5*B; %采样频率
Ts = 1/Fs; %采样时间
Tp = 10e-6; %脉宽
c = 3e8;
lamda = c/fc; %载波波长
Kr = B/Tp; %调频斜率
N_pulse = 50; %脉冲个数(个数不能太少)
t = 0:1/Fs:Tp; %采样时间
N_samples = length(t); %采样点个数
N_targets= 5; %目标物体个数
Rmax = c/2*1*Tp; %最大检测距离(受到采样时间的限制,采样时间为16Tp)
Vmax = lamda*PRF/2; %目标最大速度,最大测速范围满足在第一盲速之内
R_targets = [1000,230,680,860,145];%物体的距离随机生成
RCS = 10*(exp(1i*2*pi*rand(1,N_targets)));%目标物体RCS,幅度为10,相位在(0,2pi)之间随机分布
V_targets = Vmax*((rand(1,N_targets))/2);%目标物体速度
%% 接收矩阵sr计算
sr = zeros(N_pulse,N_samples);%sr的每一行表示一个回波信号所含的采样点,一共有50行不同回波信号构成
for i = 1:N_pulse
delay = (i-1)*Tr; %发送第i个Chrip信号时相对初始时间的时延
sr_row = 0;
% 内层for循环,一个目标一个目标来研究,对应每一个回波脉冲是由每一个目标回波之和组成
for k=1:N_targets
tao=2*(R_targets(k)-V_targets(k).*(delay+t))/c; %在当前时刻,雷达信号往返的时间(目标物体在运动,距离在变化)
sr_temp=RCS(k).*rectpuls(t-tao-Tp/2,Tp).*exp(-1j*2*pi*fc*tao+1j*pi*Kr.*(t-tao-Tp/2).^2);
sr_row=sr_row+sr_temp;
end
% 外层for循环,不同的脉冲,对应的delay是不同值,再代入来计算回波
sr(i,:)=sr_row;
end
R_range = c*t/2; %在采样时间内,距离的范围
%% 脉冲压缩
% 参考信号st
st=rectpuls(t-Tp/2,Tp).*exp(1i*pi*Kr*(t-Tp/2).^2);%时域参考信号(将原始信号右移Tp/2)
stf=conj(fft(st));%匹配滤波器的频域特性
for i=1:N_pulse
sr_mf(i,:)=ifft(fft(sr(i,:)).*stf); %分别对每一行脉冲压缩 频域脉冲压缩(匹配滤波mf)
end
%% 图像输出
%----------------------------测距(Range FFT)------------------------------
% 第一个回波信号的距离幅度谱
figure(2);
plot(t*c/2,abs(sr_mf(1,:)))
title('第一个回波信号的距离幅度谱');
%----------------------------测速(Speed FFT)------------------------------
sr_speed=fft(sr_mf,[],1);
V=linspace(0,PRF,50)*lamda/2;
% 尝试着画一下三维图
figure(4)
mesh(R_range,V,abs(sr_speed)/max(max(abs(sr_speed))));
xlabel('距离/m');
ylabel('速度/(m/s)');
zlabel('幅度/db');
title('目标距离速度信息一览');
-
代码分析