目前图像识别分为两大类:一类是one_stage,另一类是two-stage。这两类各有优缺点。
one_stage:最核心的优势:速度非常快,适合做实时检测任务!但是缺点也是有的,效果通常情况下不会太好!
two-stage:速度通常较慢(5FPS) ,但是效果通常还是不错的!
目前,two-stage代表有Faster-rcnn Mask-Rcnn,one-stage代表有YOLO系列。
而我们想要实现的是,道路上车辆检测,用以调节下一个路口红绿灯时长。要实现这项功能,我们就必须要有足够快的检测速度,而在识别效果上我们可以存在少量的误差,这样的情况下one-stage的YOLO算法显然是更好的选择。
YOLO系列有很多版本,我们从实际项目出发,去选择合适的版本。首先是指标分析,map指标:综合衡量检测效果(我们不能单看精度和recall);
PS:精度检测单个物体识别的准确度;recall指一帧中检测出物体数量与总数的比
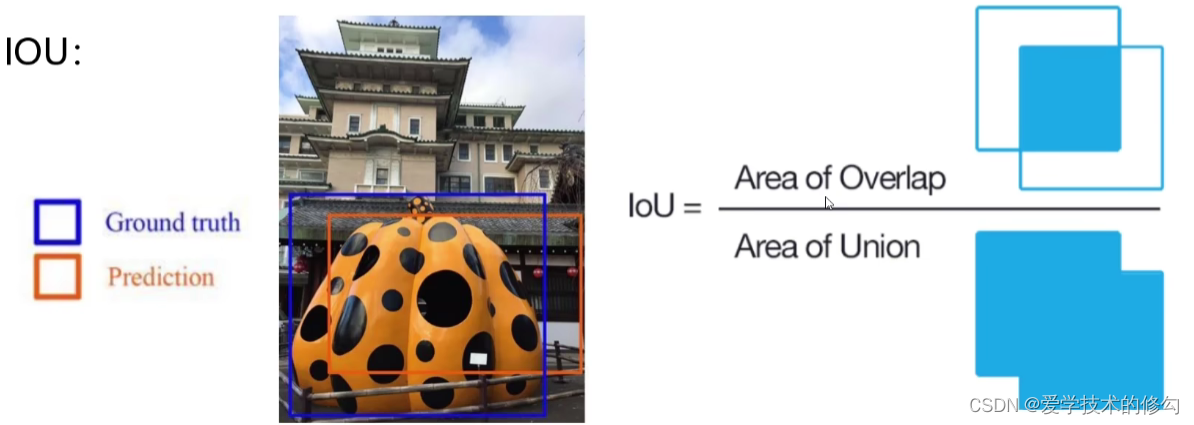
IOU是指真实物体和框选物体的交集与并集的比值。
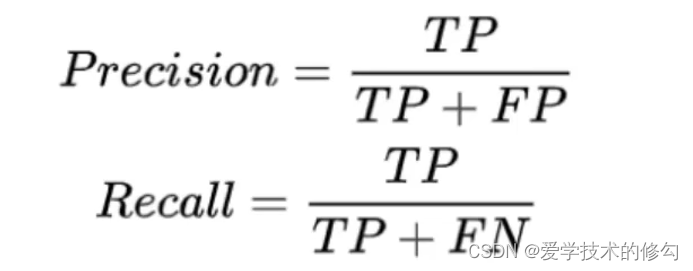
这里的TP是true positives的缩写,是指实际判定到的我们所需要的目标;FP是false positives的缩写,是指错误的把我们不需要的目标当作我们所需要的; FN是false negatives的缩写,是指把我们所需目标判定为不需要的;TN是true negatives的缩写,是指实际正确判定我们不需要的。
精度precision是指正确识别的所需物体与真实识别到比值。
召回率recall指真实识别出我们所需的占所需样本的比值。
置信度是指识别框选的是一个物体的可能性。
MAP是指综合衡量检测效果,MAP的计算是要取所有精度和召回率的平均值。(如下,计算面积)
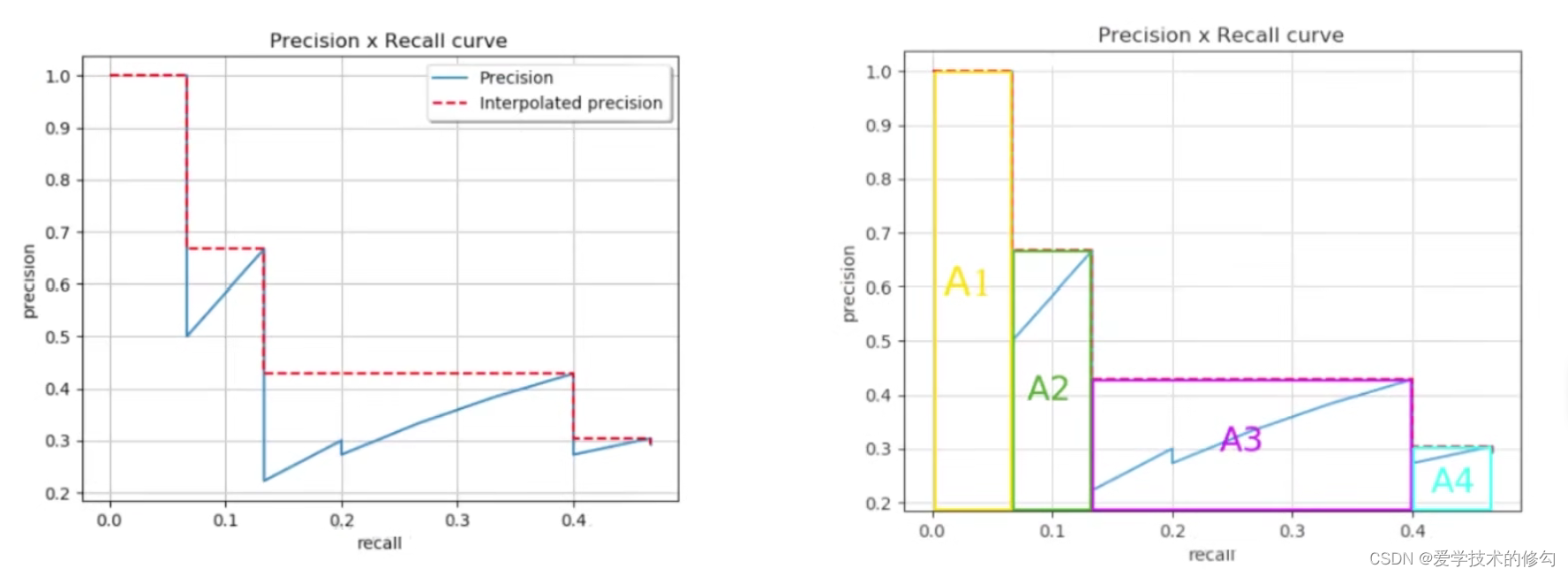
PS:YOLO算法速度更快,适合视频类识别,同样检测效果也是采用MAP来进行综合计算。