文章目录
一.虚拟机部分
看了很多博客,古月居的教程官网教程都看了,最终自己成功的方法,需要对虚拟机的网络连接修改下配置。
首先需要保证主机的ip地址和虚拟机的ip地址前三位都一样,也就是在同一局域网下,比如下图这样。

1.修改虚拟机的网络连接为桥连接模式
打开虚拟机的设置界面,在网络适配器这一项中,选择桥接模式。

关于虚拟机的网络连接几种模式的介绍,有如下博主的博客参考:主机连接wifi时,虚拟机VMware如何连接网络
2.查看自己的虚拟机IP地址
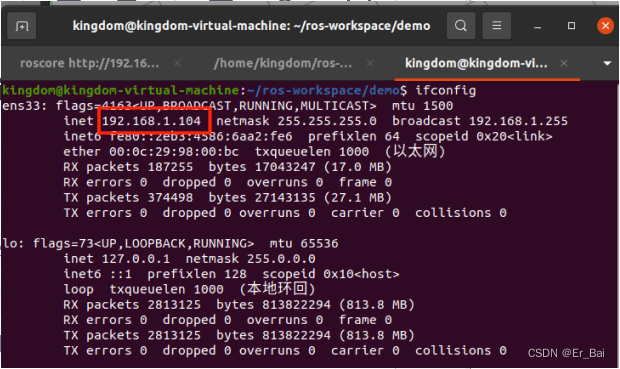
在虚拟机中打开终端,输入ifconfig,如下图显示出我的虚拟机的IP地址是192.168.1.104
3.修改虚拟机的ros配置
在主目录下,使用Ctrl+H查看隐藏文件,打开.bashrc文件,在文件的最后加入export ROS_IP=192.168.1.104
之后启动roscore,看到显示了虚拟机的ROS内核地址为http://192.168.1.104:11311/

二、主机部分
1.主机IP地址
在自己的主机中打开cmd, 输入ipconfig,看到自己的IP地址为192.168.1.101

2.在matlab中使用命令和ROS建立连接
注意要先在虚拟机中输入roscore打开ros内核,才能建立连接, 分别输入以下三句话,
setenv('ROS_MASTER_URI','http://192.168.1.104:11311/')
setenv('ROS_IP','192.168.1.101')
rosinit()

3.查看ROS话题并订阅话题
在matlab命令行中,输入rostopic list,看到目前的话题

接下来来订阅一个话题,查看发送的数据是什么,有两种方式,一种是使用receive()函数,另一种是使用回调函数,前者只能得到一次message,后者可以实时获取数据,只要订阅的话题有publish数据。
扫描二维码关注公众号,回复:
14997914 查看本文章

(1)方式一:使用receive()函数
sub_name = rossubscriber(topic_name)
message = receive(sub_name, wait_time)

这里提示,要使用showdetail()函数查看message的具体信息,使用看下效果

(2)方式二:使用回调函数
sub_name = rossubscriber(topic_name, @callbackfunction);
function callbackfunction(~, msg)
%your code
end
实现效果如图所示:
