1. 简介
作者提出了一种单个的端到端区域建议网络用于多类别3D目标检测。2D和3D检测任务各自的目标是最终对一个对象的所有实例进行分类,而它们在定位目标的维数上是不同的。直观地说,我们期望能够利用2D检测的强大功能来指导和改进3D检测的性能,最好是在一个统一的框架内,而不是作为单独的组件。因此,作者重新定义了3D检测问题,使2D和3D空间都利用共享的锚点和分类目标。这样一来,可靠地对物体进行分类的角度来看,3D检测器的性能自然能够跟2D检测器媲美。因此,剩余的挑战被减少到相机坐标间内的3D定位了。
作者提出三个关键的设计来改进3D估计。
1. 提出构造3D锚点,使其在图像空间内发挥作用,使用每个锚点的3D参数的先验统计信息初始化所有锚点。因此,基于固定相机视角的一致性和2D尺度与3D深度的相关性,每个离散锚点在3D中具有很强的先验推理能力。
2. 设计了新的深度感知卷积层,(图1的blue)能够学习空间感知的特征。传统上,卷积操作倾向于空间不变【18,19】,以便在任意图像位置检测对象。然而,虽然这是低阶特征的情况,但如果能够提高对深度的认知,并假设相对一致的相机场景几何的话,高阶特征具有提升的潜力。
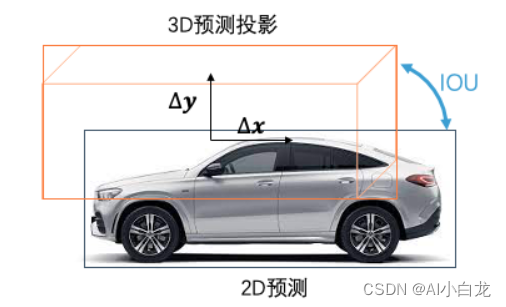
3.在后优化算法中使用3D --> 2D投影一致性损失来优化方向估计\theta。使用2D边界框来帮助纠正异常的\theta估计值。
概括如下:
- 利用共享的2D和3D检测空间,建立一个独立的单目3D区域建议网络(M3D-RPN),同时利用先验统计对每个3D参数进行强初始化。
- 提出深度感知卷积来感知3D参数估计,从而使网络能学习更多的空间级高阶特征。
- 提出一个简单的方向估计后优化算法,该算法使用3D投影和2D检测来改善\theta的估计。
- 在城市KITTI benchmark上取得SOTA,用于单目鸟瞰视角和使用单个多类别网络的3D检测。
方案难点:
- 深度信息缺失,由 2D 图像预测 3D 位置困难
- 相机传感器敏感,受环境影响(夜晚、雨天)等较大
- 图像层面,遮挡、截断等问题严重影响感知精度
论文地址:M3D-RPN:Monocular 3D Region Proposal Network for Object Detection
Github地址: https://github.com/garrickbrazil/M3D-RPN
项目官方地址:http://cvlab.cse.msu.edu/ project-m3d-rpn.html
优秀的论文翻译:【论文翻译】M3D-RPN:Monocular 3D Region Proposal Network for Object Detection
2. 安装说明
2.1 环境要求
- Python >= 3.6
- paddlepaddle >= 2.0.2
- cuda >= 9
- boost 库
- 常见 Python 库
In [2]
# 安装库
! pip install shapelyLooking in indexes: https://pypi.tuna.tsinghua.edu.cn/simple
Collecting shapely
Downloading https://pypi.tuna.tsinghua.edu.cn/packages/d1/ec/3038263d69a0065d3ab6944ae839f5f00896efd29b13ae62d73c00345b95/Shapely-1.8.2-cp37-cp37m-manylinux_2_12_x86_64.manylinux2010_x86_64.whl (2.0 MB)
━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━━ 2.0/2.0 MB 9.8 MB/s eta 0:00:00:00:0100:01
Installing collected packages: shapely
Successfully installed shapely-1.8.2
[notice] A new release of pip available: 22.1.2 -> 22.2.1
[notice] To update, run: pip install --upgrade pip
2.2 解压数据及代码
项目代码在 M3D-RPN-2.0.tar 文件中,数据集在 kitti.tar 文件中,解压到合适路径即可使用。
In [ ]
# 如果希望解压到其他目录
# 可选择其他路径(默认 /home/aistudio )
! tar xf ~/data/data141443/kitti.tar
! unzip -qo ~/data/data141443/M3D-RPN-2.0.zip
! rm -rf __MACOSX3. 数据准备
In [3]
# 删除已有软连接
! rm -rf ~/M3D-RPN-2.0/dataset/kitti_split1/training
! rm -rf ~/M3D-RPN-2.0/dataset/kitti_split1/validationIn [4]
%cd ~/M3D-RPN-2.0/
! python dataset/kitti_split1/setup_split.py
! sh dataset/kitti_split1/devkit/cpp/build.sh
! cd lib/nms && make/home/aistudio/M3D-RPN-2.0
Linking train
Linking val
Done
evaluate_object.cpp: In function ‘void saveAndPlotPlots(std::__cxx11::string, std::__cxx11::string, std::__cxx11::string, std::vector<double>*, bool)’:
evaluate_object.cpp:763:11: warning: ignoring return value of ‘int system(const char*)’, declared with attribute warn_unused_result [-Wunused-result]
system(command);
~~~~~~^~~~~~~~~
evaluate_object.cpp:768:9: warning: ignoring return value of ‘int system(const char*)’, declared with attribute warn_unused_result [-Wunused-result]
system(command);
~~~~~~^~~~~~~~~
evaluate_object.cpp:770:9: warning: ignoring return value of ‘int system(const char*)’, declared with attribute warn_unused_result [-Wunused-result]
system(command);
~~~~~~^~~~~~~~~
evaluate_object.cpp:772:9: warning: ignoring return value of ‘int system(const char*)’, declared with attribute warn_unused_result [-Wunused-result]
system(command);
~~~~~~^~~~~~~~~
evaluate_object.cpp: In function ‘bool eval(std::__cxx11::string, Mail*)’:
evaluate_object.cpp:786:9: warning: ignoring return value of ‘int system(const char*)’, declared with attribute warn_unused_result [-Wunused-result]
system(("mkdir " + plot_dir).c_str());
~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
evaluate_object.cpp: In function ‘int32_t main(int32_t, char**)’:
evaluate_object.cpp:925:11: warning: ignoring return value of ‘int system(const char*)’, declared with attribute warn_unused_result [-Wunused-result]
system(("rm -r results/" + result_sha).c_str());
~~~~~~^~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
python setup.py build_ext --inplace
running build_ext
skipping 'cpu_nms.c' Cython extension (up-to-date)
skipping 'gpu_nms.cpp' Cython extension (up-to-date)
rm -rf build
整个数据集包含图片 images,标签 labels 和相机参数 calib,每个标签文件种包含以下字段:
type---物体类别
truncated---是否截断
occluded---是否遮挡
alpha---观测角
bbox---障碍物2D框
dimension---障碍物的3D大小
location---障碍物的3D底面中心点位置
rotation_y---障碍物的朝向角
最终数据集文件组织结构为:
kitti
└── training
├── calib
├── image_2
└── label_2
4. 模型结构
单目 3D 检测提供两种选择:基于 anchor 的方案和 anchor-free 的方案
基于anchor:从图像中估计出 3D 检测框,也无需预测中间的 3D 场景表示,可以直接利用一个区域提案网络,生成给点图像的 3D 锚点。不同于以往与类别无关的 2D 锚点,3D 锚点的形状通常与其语义标签有很强的相关性。
Anchor-free:将 2D 检测方法 CenterNet 扩展到基于图像的 3D 检测器,该框架将对象编码为单个点(对象的中心点)并使用关键点估计来找到它。此外,几个平行的头被用来估计物体的其他属性,包括深度、尺寸、位置和方向。
采用 anchor 的方法使用了 3D 障碍物的平均信息作为先验知识,3D 检测效果实际落地更好,所以我们采用经典的基于 anchor 的方法。在骨干网络部分,我们选择的是 DenseNet,这种网络建立的是前面所有层与后面层的密集连接,实现特征重用,有着省参数,扛过拟合等优点。
根据单目 3D 检测实时性的要求,这里我们选择了 DenseNet121 作为我们的骨干网络。
数据过滤:根据 bbox 可见程度、大小来过滤每个 bbox 标签,根据有无保留 bbox 过滤每张图片,整体平衡前后背景,保证训练的稳定性。
数据增强:主要使用 RandomFlip、Resize 两种数据增强策略
Anchor定义:模型输出2D anchor定义3D anchor定义

后处理优化: 根据将 3D 相关信息组成 3D 框,投影到图像上得到投影的八点框,取八点最小外接包围框与 2D 预测结果算 IOU,通过不断的调整旋转角 ry 或深度 z,来使得 IOU 最小。此算法利用了 2D 检测的结果要比 3D 检测的结果准确的先验知识,用 2D 框来纠正预测的 3D 属性,来达到优化 3D 定位精度的目的。整体框架如下图所示:
经过调整后,在 car 类前后效果对比如下:
| 3D detection | Easy | Mod | Hard |
|---|---|---|---|
| 优化前 | 16.57 | 13.82 | 12.30 |
| 优化后 | 19.09 | 15.70 | 13.15 |
| 增量 | +2.52 | +1.88 | +0.85 |
5. 模型训练
训练被拆分成了热身配置和主要配置。详细信息可查看 config 中的配置。
首先,在启动模型训练之前,可以修改配置文件中相关内容, 主要包括数据集的地址以及类别数量。对应到配置文件中的位置如下所示:
基础配置
solver_type: 'sgd'
lr: 0.004
momentum: 0.9
weight_decay: 0.0005
max_iter: 50000
snapshot_iter: 10000
display: 20
do_test: True
数据集路径
dataset_test: 'kitti_split1'
datasets_train:
name: 'kitti_split1'
anno_fmt: 'kitti_det'
im_ext: '.png'
scale: 1
还有一些其他的配置诸如优化器配置、标签信息、检测器样本等,可以在 config 目录下查看。
- 启动热身配置训练 (不包含 depth-aware)
In [1]
! python train.py --conf=kitti_3d_multi_warmup/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/__init__.py:107: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import MutableMapping /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/rcsetup.py:20: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import Iterable, Mapping /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/colors.py:53: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import Sized 2022-07-30 15:44:24,451-INFO: Loading KITTI dataset from dataset ... 2022-07-30 15:44:24,451-INFO: Loading imgs_label kitti_split1 2022-07-30 15:44:35,085-INFO: 1000/3712, dt: 0.0106, eta: 28.8s 2022-07-30 15:44:48,086-INFO: 2000/3712, dt: 0.0118, eta: 20.2s 2022-07-30 15:45:01,280-INFO: 3000/3712, dt: 0.0123, eta: 8.7s 2022-07-30 15:45:11,044-INFO: weighted respectively as 1.00 and 0.00 2022-07-30 15:45:11,045-INFO: Found 3534 foreground and 178 empty images W0730 15:45:11.055980 1527 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 10.1 W0730 15:45:11.060575 1527 device_context.cc:465] device: 0, cuDNN Version: 7.6. load pretrain model from pretrained_model/densenet.pdparams 2022-07-30 15:45:27,696-INFO: iter: 20, acc (bg: 0.68, fg: 0.28, iou: 0.57), loss (bbox_3d: 2.9470, cls: 1.7128, iou: 0.5649), misc (ry: 1.67, z: 3.07), dt: 3.16, eta: 43.9h epoch 0 | batch step 20 | iter 20, batch cost: 0.49549, loss 4.922 2022-07-30 15:45:40,023-INFO: iter: 40, acc (bg: 1.00, fg: 0.17, iou: 0.58), loss (bbox_3d: 2.7112, cls: 0.9902, iou: 0.5598), misc (ry: 1.53, z: 2.70), dt: 1.89, eta: 26.2h epoch 0 | batch step 40 | iter 40, batch cost: 0.42486, loss 5.402 2022-07-30 15:45:52,233-INFO: iter: 60, acc (bg: 1.00, fg: 0.10, iou: 0.58), loss (bbox_3d: 2.8668, cls: 0.8062, iou: 0.5496), misc (ry: 1.70, z: 2.58), dt: 1.46, eta: 20.3h epoch 0 | batch step 60 | iter 60, batch cost: 0.53743, loss 7.218 2022-07-30 15:46:03,758-INFO: iter: 80, acc (bg: 1.00, fg: 0.18, iou: 0.59), loss (bbox_3d: 2.6783, cls: 0.6714, iou: 0.5409), misc (ry: 1.73, z: 2.85), dt: 1.24, eta: 17.2h epoch 0 | batch step 80 | iter 80, batch cost: 0.52226, loss 3.733 2022-07-30 15:46:16,135-INFO: iter: 100, acc (bg: 1.00, fg: 0.35, iou: 0.60), loss (bbox_3d: 2.4326, cls: 0.5723, iou: 0.5181), misc (ry: 1.44, z: 2.96), dt: 1.12, eta: 15.5h epoch 0 | batch step 100 | iter 100, batch cost: 0.47307, loss 2.757 2022-07-30 15:46:28,455-INFO: iter: 120, acc (bg: 1.00, fg: 0.42, iou: 0.60), loss (bbox_3d: 2.0926, cls: 0.5493, iou: 0.5161), misc (ry: 1.41, z: 2.62), dt: 1.03, eta: 14.3h epoch 0 | batch step 120 | iter 120, batch cost: 0.47274, loss 3.074 2022-07-30 15:46:40,738-INFO: iter: 140, acc (bg: 0.99, fg: 0.48, iou: 0.61), loss (bbox_3d: 2.1851, cls: 0.4690, iou: 0.5022), misc (ry: 1.66, z: 2.50), dt: 0.97, eta: 13.5h epoch 0 | batch step 140 | iter 140, batch cost: 0.48107, loss 2.733 2022-07-30 15:46:52,978-INFO: iter: 160, acc (bg: 0.99, fg: 0.59, iou: 0.62), loss (bbox_3d: 2.1454, cls: 0.5109, iou: 0.4816), misc (ry: 1.54, z: 2.75), dt: 0.93, eta: 12.9h epoch 0 | batch step 160 | iter 160, batch cost: 0.45592, loss 3.518 2022-07-30 15:47:05,190-INFO: iter: 180, acc (bg: 1.00, fg: 0.38, iou: 0.62), loss (bbox_3d: 2.2131, cls: 0.5824, iou: 0.4913), misc (ry: 1.30, z: 2.69), dt: 0.89, eta: 12.4h epoch 0 | batch step 180 | iter 180, batch cost: 0.45615, loss 2.335 2022-07-30 15:47:17,361-INFO: iter: 200, acc (bg: 1.00, fg: 0.44, iou: 0.61), loss (bbox_3d: 2.2246, cls: 0.6390, iou: 0.5003), misc (ry: 1.39, z: 2.87), dt: 0.86, eta: 12.0h epoch 0 | batch step 200 | iter 200, batch cost: 0.47935, loss 4.167 2022-07-30 15:47:29,857-INFO: iter: 220, acc (bg: 0.99, fg: 0.44, iou: 0.62), loss (bbox_3d: 2.1621, cls: 0.5316, iou: 0.4924), misc (ry: 1.69, z: 2.62), dt: 0.84, eta: 11.7h epoch 0 | batch step 220 | iter 220, batch cost: 0.50687, loss 2.841 2022-07-30 15:47:42,019-INFO: iter: 240, acc (bg: 1.00, fg: 0.65, iou: 0.64), loss (bbox_3d: 1.8156, cls: 0.4068, iou: 0.4596), misc (ry: 1.28, z: 2.81), dt: 0.82, eta: 11.4h epoch 0 | batch step 240 | iter 240, batch cost: 0.50188, loss 1.798 2022-07-30 15:47:54,038-INFO: iter: 260, acc (bg: 0.99, fg: 0.50, iou: 0.62), loss (bbox_3d: 2.0267, cls: 0.5757, iou: 0.4855), misc (ry: 1.51, z: 2.03), dt: 0.81, eta: 11.1h epoch 0 | batch step 260 | iter 260, batch cost: 0.54614, loss 2.679 2022-07-30 15:48:05,952-INFO: iter: 280, acc (bg: 0.99, fg: 0.72, iou: 0.65), loss (bbox_3d: 1.6289, cls: 0.3576, iou: 0.4421), misc (ry: 1.36, z: 1.91), dt: 0.79, eta: 10.9h epoch 0 | batch step 280 | iter 280, batch cost: 0.48394, loss 3.034 2022-07-30 15:48:16,912-INFO: iter: 300, acc (bg: 0.90, fg: 0.36, iou: nan), loss (bbox_3d: 2.6962, cls: 1.0629, iou: nan), misc (ry: 1.59, z: 2.99), dt: 0.77, eta: 10.7h epoch 0 | batch step 300 | iter 300, batch cost: 0.32453, loss nan 2022-07-30 15:48:26,841-INFO: iter: 320, acc (bg: 0.81, fg: 0.15, iou: nan), loss (bbox_3d: 2.7870, cls: 1.7044, iou: nan), misc (ry: 1.52, z: 3.33), dt: 0.76, eta: 10.5h epoch 0 | batch step 320 | iter 320, batch cost: 0.43582, loss 5.697 2022-07-30 15:48:36,756-INFO: iter: 340, acc (bg: 0.94, fg: 0.07, iou: nan), loss (bbox_3d: 2.8472, cls: 1.6913, iou: nan), misc (ry: 1.36, z: 3.00), dt: 0.74, eta: 10.2h epoch 0 | batch step 340 | iter 340, batch cost: 0.34816, loss nan 2022-07-30 15:48:46,644-INFO: iter: 360, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.7810, cls: 1.6852, iou: nan), misc (ry: 1.54, z: 3.50), dt: 0.73, eta: 10.0h epoch 0 | batch step 360 | iter 360, batch cost: 0.31263, loss nan 2022-07-30 15:48:56,450-INFO: iter: 380, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.6894, cls: 1.6709, iou: nan), misc (ry: 1.48, z: 2.73), dt: 0.72, eta: 9.9h epoch 0 | batch step 380 | iter 380, batch cost: 0.35810, loss nan 2022-07-30 15:49:06,365-INFO: iter: 400, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8477, cls: 1.6712, iou: nan), misc (ry: 1.60, z: 3.09), dt: 0.70, eta: 9.7h epoch 0 | batch step 400 | iter 400, batch cost: 0.33034, loss nan 2022-07-30 15:49:15,709-INFO: iter: 420, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8604, cls: 1.6656, iou: nan), misc (ry: 1.74, z: 3.08), dt: 0.69, eta: 9.6h epoch 0 | batch step 420 | iter 420, batch cost: 0.35772, loss nan 2022-07-30 15:49:25,107-INFO: iter: 440, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 3.1004, cls: 1.6635, iou: nan), misc (ry: 1.73, z: 3.00), dt: 0.68, eta: 9.4h epoch 0 | batch step 440 | iter 440, batch cost: 0.44086, loss 4.242 2022-07-30 15:49:34,778-INFO: iter: 460, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.9430, cls: 1.6531, iou: nan), misc (ry: 1.55, z: 3.01), dt: 0.67, eta: 9.3h epoch 0 | batch step 460 | iter 460, batch cost: 0.39412, loss nan 2022-07-30 15:49:44,426-INFO: iter: 480, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.6437, cls: 1.6503, iou: nan), misc (ry: 1.71, z: 2.80), dt: 0.67, eta: 9.2h epoch 0 | batch step 480 | iter 480, batch cost: 0.42811, loss 5.613 2022-07-30 15:49:54,486-INFO: iter: 500, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8225, cls: 1.6487, iou: nan), misc (ry: 1.56, z: 4.15), dt: 0.66, eta: 9.1h epoch 0 | batch step 500 | iter 500, batch cost: 0.41976, loss 4.490 2022-07-30 15:50:05,250-INFO: iter: 520, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.7804, cls: 1.6359, iou: nan), misc (ry: 1.52, z: 2.93), dt: 0.66, eta: 9.0h epoch 0 | batch step 520 | iter 520, batch cost: 0.48338, loss 4.897 2022-07-30 15:50:16,740-INFO: iter: 540, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.6938, cls: 1.6308, iou: nan), misc (ry: 1.55, z: 3.69), dt: 0.65, eta: 9.0h epoch 0 | batch step 540 | iter 540, batch cost: 0.40569, loss 5.528 2022-07-30 15:50:27,389-INFO: iter: 560, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 3.0550, cls: 1.6286, iou: nan), misc (ry: 1.64, z: 3.63), dt: 0.65, eta: 8.9h epoch 0 | batch step 560 | iter 560, batch cost: 0.39938, loss nan 2022-07-30 15:50:37,931-INFO: iter: 580, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.7601, cls: 1.6200, iou: nan), misc (ry: 1.47, z: 2.83), dt: 0.64, eta: 8.8h epoch 0 | batch step 580 | iter 580, batch cost: 0.33427, loss nan 2022-07-30 15:50:48,232-INFO: iter: 600, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8752, cls: 1.6214, iou: nan), misc (ry: 1.70, z: 3.11), dt: 0.64, eta: 8.8h epoch 0 | batch step 600 | iter 600, batch cost: 0.42065, loss nan 2022-07-30 15:50:57,694-INFO: iter: 620, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.4335, cls: 1.6145, iou: nan), misc (ry: 1.46, z: 2.35), dt: 0.63, eta: 8.7h epoch 0 | batch step 620 | iter 620, batch cost: 0.41829, loss 4.738 2022-07-30 15:51:08,082-INFO: iter: 640, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.9969, cls: 1.6115, iou: nan), misc (ry: 1.57, z: 3.44), dt: 0.63, eta: 8.6h epoch 0 | batch step 640 | iter 640, batch cost: 0.44508, loss 4.876 2022-07-30 15:51:17,536-INFO: iter: 660, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8563, cls: 1.6088, iou: nan), misc (ry: 1.54, z: 3.32), dt: 0.63, eta: 8.6h epoch 0 | batch step 660 | iter 660, batch cost: 0.31495, loss nan 2022-07-30 15:51:27,147-INFO: iter: 680, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.9002, cls: 1.6037, iou: nan), misc (ry: 1.69, z: 2.83), dt: 0.62, eta: 8.5h epoch 0 | batch step 680 | iter 680, batch cost: 0.38046, loss nan 2022-07-30 15:51:36,771-INFO: iter: 700, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.7077, cls: 1.6013, iou: nan), misc (ry: 1.53, z: 3.16), dt: 0.62, eta: 8.5h epoch 0 | batch step 700 | iter 700, batch cost: 0.44091, loss 4.932 2022-07-30 15:51:47,549-INFO: iter: 720, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 3.1246, cls: 1.5999, iou: nan), misc (ry: 1.63, z: 3.52), dt: 0.62, eta: 8.4h epoch 0 | batch step 720 | iter 720, batch cost: 0.36298, loss nan 2022-07-30 15:51:57,578-INFO: iter: 740, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8187, cls: 1.5975, iou: nan), misc (ry: 1.36, z: 3.08), dt: 0.61, eta: 8.4h epoch 0 | batch step 740 | iter 740, batch cost: 0.35585, loss nan 2022-07-30 15:52:07,169-INFO: iter: 760, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8386, cls: 1.5943, iou: nan), misc (ry: 1.48, z: 3.21), dt: 0.61, eta: 8.3h epoch 0 | batch step 760 | iter 760, batch cost: 0.45888, loss 4.159 2022-07-30 15:52:17,427-INFO: iter: 780, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.5863, cls: 1.5915, iou: nan), misc (ry: 1.53, z: 2.91), dt: 0.61, eta: 8.3h epoch 0 | batch step 780 | iter 780, batch cost: 0.42366, loss 5.303 2022-07-30 15:52:26,824-INFO: iter: 800, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 3.0004, cls: 1.5904, iou: nan), misc (ry: 1.48, z: 3.07), dt: 0.60, eta: 8.2h epoch 0 | batch step 800 | iter 800, batch cost: 0.33793, loss nan 2022-07-30 15:52:37,415-INFO: iter: 820, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.5873, cls: 1.5835, iou: nan), misc (ry: 1.62, z: 2.84), dt: 0.60, eta: 8.2h epoch 0 | batch step 820 | iter 820, batch cost: 0.33032, loss nan 2022-07-30 15:52:47,838-INFO: iter: 840, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 3.0223, cls: 1.5823, iou: nan), misc (ry: 1.65, z: 3.18), dt: 0.60, eta: 8.2h epoch 0 | batch step 840 | iter 840, batch cost: 0.45120, loss 6.283 2022-07-30 15:52:58,364-INFO: iter: 860, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.9777, cls: 1.5726, iou: nan), misc (ry: 1.62, z: 2.92), dt: 0.60, eta: 8.2h epoch 0 | batch step 860 | iter 860, batch cost: 0.36559, loss nan 2022-07-30 15:53:07,671-INFO: iter: 880, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.9200, cls: 1.5723, iou: nan), misc (ry: 1.72, z: 2.72), dt: 0.59, eta: 8.1h epoch 0 | batch step 880 | iter 880, batch cost: 0.34666, loss nan 2022-07-30 15:53:18,026-INFO: iter: 900, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 3.0423, cls: 1.5669, iou: nan), misc (ry: 1.59, z: 2.94), dt: 0.59, eta: 8.1h epoch 0 | batch step 900 | iter 900, batch cost: 0.29486, loss nan 2022-07-30 15:53:27,427-INFO: iter: 920, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.9947, cls: 1.5652, iou: nan), misc (ry: 1.70, z: 3.53), dt: 0.59, eta: 8.0h epoch 0 | batch step 920 | iter 920, batch cost: 0.40898, loss 4.630 2022-07-30 15:53:36,758-INFO: iter: 940, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.6468, cls: 1.5581, iou: nan), misc (ry: 1.57, z: 3.04), dt: 0.59, eta: 8.0h epoch 0 | batch step 940 | iter 940, batch cost: 0.40008, loss nan 2022-07-30 15:53:46,767-INFO: iter: 960, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8736, cls: 1.5566, iou: nan), misc (ry: 1.70, z: 2.76), dt: 0.59, eta: 8.0h epoch 0 | batch step 960 | iter 960, batch cost: 0.38730, loss nan 2022-07-30 15:53:56,973-INFO: iter: 980, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.7599, cls: 1.5565, iou: nan), misc (ry: 1.67, z: 3.30), dt: 0.58, eta: 8.0h epoch 0 | batch step 980 | iter 980, batch cost: 0.46592, loss nan 2022-07-30 15:54:06,729-INFO: iter: 1000, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8967, cls: 1.5525, iou: nan), misc (ry: 1.56, z: 3.01), dt: 0.58, eta: 7.9h epoch 0 | batch step 1000 | iter 1000, batch cost: 0.31681, loss nan 2022-07-30 15:54:16,163-INFO: iter: 1020, acc (bg: 1.00, fg: 0.00, iou: nan), loss (bbox_3d: 2.8384, cls: 1.5481, iou: nan), misc (ry: 1.46, z: 3.05), dt: 0.58, eta: 7.9h
6. 模型评估
评估默认配置:output/kitti_3d_multi_warmup/conf.pkl
pkl配置
model: "model_3d_dilate"
solver_type: "sgd"
lr: 0.004
momentum: 0.9
max_iter: 50000
snapshot_iter: 10000
do_test: "True"
test_scale: 512
crop_size: [512, 1760]
mirror_prob: 0.5
distort_prob: -1
dataset_test: "kitti_split1"
datasets_train:
name: "kitti_split1"
anno_fmt: "kitti_det"
im_ext: ".png"
scale: 1
可视化 pkl 配置文件方法
In [ ]
import pickle
import numpy as np
PKL_PATH = 'output/kitti_3d_multi_warmup/conf.pkl'
f = open(PKL_PATH,'rb')
data = pickle.load(f)
print(data){'model': 'model_3d_dilate', 'solver_type': 'sgd', 'lr': 0.004, 'momentum': 0.9, 'weight_decay': 0.0005, 'max_iter': 50000, 'snapshot_iter': 10000, 'display': 20, 'do_test': True, 'lr_policy': 'poly', 'lr_steps': None, 'lr_target': 4e-08, 'rng_seed': 2, 'cuda_seed': 2, 'image_means': [0.485, 0.456, 0.406], 'image_stds': [0.229, 0.224, 0.225], 'feat_stride': 16, 'has_3d': True, 'test_scale': 512, 'crop_size': [512, 1760], 'mirror_prob': 0.5, 'distort_prob': -1, 'dataset_test': 'kitti_split1', 'datasets_train': [{'name': 'kitti_split1', 'anno_fmt': 'kitti_det', 'im_ext': '.png', 'scale': 1}], 'use_3d_for_2d': True, 'percent_anc_h': [0.0625, 0.75], 'min_gt_h': 32.0, 'max_gt_h': 384.0, 'min_gt_vis': 0.65, 'ilbls': ['Van', 'ignore'], 'lbls': ['Car', 'Pedestrian', 'Cyclist'], 'batch_size': 2, 'fg_image_ratio': 1.0, 'box_samples': 0.2, 'fg_fraction': 0.2, 'bg_thresh_lo': 0, 'bg_thresh_hi': 0.5, 'fg_thresh': 0.5, 'ign_thresh': 0.5, 'best_thresh': 0.35, 'nms_topN_pre': 3000, 'nms_topN_post': 40, 'nms_thres': 0.4, 'clip_boxes': False, 'test_protocol': 'kitti', 'test_db': 'kitti', 'test_min_h': 0, 'min_det_scales': [0, 0], 'cluster_anchors': 0, 'even_anchors': 0, 'expand_anchors': 0, 'anchors': array([[-5.00000000e-01, -8.50000000e+00, 1.55000000e+01,
2.35000000e+01, 5.19685035e+01, 5.30606061e-01,
1.71303030e+00, 1.02484848e+00, -7.99062281e-01],
[-8.50000000e+00, -8.50000000e+00, 2.35000000e+01,
2.35000000e+01, 5.21756230e+01, 1.61817308e+00,
1.60048077e+00, 3.81134615e+00, -4.52645995e-01],
[-1.65000000e+01, -8.50000000e+00, 3.15000000e+01,
2.35000000e+01, 4.83343975e+01, 1.64394636e+00,
1.52877395e+00, 3.96643678e+00, 6.72665133e-01],
[-2.52760863e+00, -1.25552168e+01, 1.75276089e+01,
2.75552177e+01, 4.47814414e+01, 5.33859649e-01,
1.77070175e+00, 9.71052632e-01, 9.29950244e-02],
[-1.25552168e+01, -1.25552168e+01, 2.75552177e+01,
2.75552177e+01, 4.47042842e+01, 1.59936232e+00,
1.56904348e+00, 3.81408696e+00, -1.86627213e-01],
[-2.25828266e+01, -1.25552168e+01, 3.75828247e+01,
2.75552177e+01, 4.34917372e+01, 1.62085791e+00,
1.53588472e+00, 3.91044236e+00, 7.18576848e-01],
[-5.06911659e+00, -1.76382332e+01, 2.00691166e+01,
3.26382332e+01, 3.46664975e+01, 5.60784314e-01,
1.75183007e+00, 9.67189542e-01, -3.83682971e-01],
[-1.76382332e+01, -1.76382332e+01, 3.26382332e+01,
3.26382332e+01, 3.53501396e+01, 1.56719697e+00,
1.59113636e+00, 3.80957071e+00, -5.10569112e-01],
[-3.02073498e+01, -1.76382332e+01, 4.52073517e+01,
3.26382332e+01, 3.71276897e+01, 1.60199566e+00,
1.52918655e+00, 3.90407809e+00, 4.52309814e-01],
[-8.25477314e+00, -2.40095463e+01, 2.32547722e+01,
3.90095444e+01, 2.87706550e+01, 6.13238434e-01,
1.76021352e+00, 9.79964413e-01, 6.65861306e-02],
[-2.40095463e+01, -2.40095463e+01, 3.90095444e+01,
3.90095444e+01, 2.83305319e+01, 1.54346232e+00,
1.59211813e+00, 3.65965377e+00, -8.10724630e-01],
[-3.97643166e+01, -2.40095463e+01, 5.47643166e+01,
3.90095444e+01, 3.05408887e+01, 1.62575851e+00,
1.52380805e+00, 3.90750258e+00, 3.11866703e-01],
[-1.22478371e+01, -3.19956741e+01, 2.72478371e+01,
4.69956741e+01, 2.30111798e+01, 6.06449275e-01,
1.75815217e+00, 9.95905797e-01, 2.07553162e-01],
[-3.19956741e+01, -3.19956741e+01, 4.69956741e+01,
4.69956741e+01, 2.29484396e+01, 1.51036697e+00,
1.59892202e+00, 3.41869266e+00, -1.07553604e+00],
[-5.17435112e+01, -3.19956741e+01, 6.67435074e+01,
4.69956741e+01, 2.50000350e+01, 1.62773519e+00,
1.52728223e+00, 3.91656214e+00, 3.33727076e-01],
[-1.72529469e+01, -4.20058937e+01, 3.22529488e+01,
5.70058937e+01, 1.84786287e+01, 6.01377953e-01,
1.74685039e+00, 1.00673228e+00, 3.47205080e-01],
[-4.20058937e+01, -4.20058937e+01, 5.70058937e+01,
5.70058937e+01, 1.88152861e+01, 1.48707424e+00,
1.59864629e+00, 3.33720524e+00, -8.61836265e-01],
[-6.67588425e+01, -4.20058937e+01, 8.17588425e+01,
5.70058937e+01, 2.05755766e+01, 1.62259012e+00,
1.53216288e+00, 3.94210948e+00, 3.22827453e-01],
[-2.35266075e+01, -5.45532150e+01, 3.85266075e+01,
6.95532150e+01, 1.50346916e+01, 6.24688797e-01,
1.74406639e+00, 9.16597510e-01, 4.09687668e-01],
[-5.45532150e+01, -5.45532150e+01, 6.95532150e+01,
6.95532150e+01, 1.53459774e+01, 1.28964912e+00,
1.65929825e+00, 3.08289474e+00, -2.75262084e-01],
[-8.55798264e+01, -5.45532150e+01, 1.00579826e+02,
6.95532150e+01, 1.63260674e+01, 1.61281972e+00,
1.52656394e+00, 3.93422188e+00, 2.68282700e-01],
[-3.13903351e+01, -7.02806702e+01, 4.63903351e+01,
8.52806702e+01, 1.22645452e+01, 6.30507614e-01,
1.74746193e+00, 9.53908629e-01, 3.16888822e-01],
[-7.02806702e+01, -7.02806702e+01, 8.52806702e+01,
8.52806702e+01, 1.18782324e+01, 1.04448598e+00,
1.67046729e+00, 2.41532710e+00, -2.10551319e-01],
[-1.09171005e+02, -7.02806702e+01, 1.24171005e+02,
8.52806702e+01, 1.35797114e+01, 1.62121377e+00,
1.53905797e+00, 3.96132246e+00, 1.88529752e-01],
[-4.12471313e+01, -8.99942627e+01, 5.62471313e+01,
1.04994263e+02, 9.93203179e+00, 6.10459770e-01,
1.77063218e+00, 9.33965517e-01, 4.85936169e-01],
[-8.99942627e+01, -8.99942627e+01, 1.04994263e+02,
1.04994263e+02, 8.94859682e+00, 8.11129032e-01,
1.76588710e+00, 1.66185484e+00, 7.96113709e-02],
[-1.38741394e+02, -8.99942627e+01, 1.53741394e+02,
1.04994263e+02, 1.10426775e+01, 1.61037123e+00,
1.53266821e+00, 3.89865429e+00, 3.95016718e-02],
[-5.36021461e+01, -1.14704292e+02, 6.86021423e+01,
1.29704285e+02, 8.38891072e+00, 6.04338624e-01,
1.79275132e+00, 9.49629630e-01, 8.05747649e-01],
[-1.14704292e+02, -1.14704292e+02, 1.29704285e+02,
1.29704285e+02, 8.07141465e+00, 1.01018519e+00,
1.75148148e+00, 2.18962963e+00, -7.64042511e-02],
[-1.75806442e+02, -1.14704292e+02, 1.90806442e+02,
1.29704285e+02, 9.18446466e+00, 1.60643243e+00,
1.52597297e+00, 3.86878378e+00, -6.56303932e-02],
[-6.90885468e+01, -1.45677094e+02, 8.40885468e+01,
1.60677094e+02, 6.92342698e+00, 6.26693548e-01,
1.79145161e+00, 9.60241935e-01, 7.83861491e-01],
[-1.45677094e+02, -1.45677094e+02, 1.60677094e+02,
1.60677094e+02, 6.78398804e+00, 1.38389610e+00,
1.61545455e+00, 2.86194805e+00, -1.03479279e+00],
[-2.22265656e+02, -1.45677094e+02, 2.37265656e+02,
1.60677094e+02, 7.86264322e+00, 1.61697095e+00,
1.54979253e+00, 3.94771784e+00, -7.12191598e-02],
[-8.85000000e+01, -1.84500000e+02, 1.03500000e+02,
1.99500000e+02, 5.18910968e+00, 6.60465116e-01,
1.75534884e+00, 8.40930233e-01, 1.72643724e-01],
[-1.84500000e+02, -1.84500000e+02, 1.99500000e+02,
1.99500000e+02, 4.38755254e+00, 7.42857143e-01,
1.72785714e+00, 1.38142857e+00, 6.42191569e-01],
[-2.80500000e+02, -1.84500000e+02, 2.95500000e+02,
1.99500000e+02, 5.58339956e+00, 1.58328358e+00,
1.54699360e+00, 3.86228145e+00, -7.18690361e-02]]), 'bbox_means': array([[-0.00022546, 0.00160404, 0.06383215, -0.09315256, 0.01069604,
-0.06744095, 0.19155604, 0.05884239, -0.02122913, 0.06871941,
-0.00352113]]), 'bbox_stds': array([[0.13962965, 0.1255247 , 0.24738377, 0.23853353, 0.16330168,
0.13235298, 3.62072376, 0.38246312, 0.10154974, 0.50257567,
1.85493732]]), 'anchor_scales': array([ 32. , 40.1104343 , 50.27646685, 63.01909126,
78.99134748, 99.01178916, 124.10643323, 155.56134174,
194.98853052, 244.40858256, 306.35419975, 384. ]), 'anchor_ratios': array([0.5, 1. , 1.5]), 'hard_negatives': True, 'focal_loss': 0, 'cls_2d_lambda': 1, 'iou_2d_lambda': 1, 'bbox_2d_lambda': 0, 'bbox_3d_lambda': 1, 'bbox_3d_proj_lambda': 0.0, 'hill_climbing': True, 'pretrained': 'pretrained_model/densenet.pdparams', 'visdom_port': 8100}
In [ ]
%cd ~/M3D-RPN-2.0
! python test.py \
--conf_path output/kitti_3d_multi_warmup/conf.pkl \
--weights_path output/kitti_3d_multi_warmup/weights/iter50000.0_params.pdparams/home/aistudio/M3D-RPN-2.0 /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/__init__.py:107: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import MutableMapping /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/rcsetup.py:20: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import Iterable, Mapping /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/colors.py:53: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import Sized W0606 16:20:25.278681 659 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 10.1 W0606 16:20:25.283661 659 device_context.cc:465] device: 0, cuDNN Version: 7.6. loaded model from output/kitti_3d_multi_warmup/weights/iter50000.0_params.pdparams start evaluation... 2022-06-06 16:23:50,091-INFO: testing 1000/3769, dt: 0.201, eta: 9.3m 2022-06-06 16:27:11,090-INFO: testing 2000/3769, dt: 0.201, eta: 5.9m 2022-06-06 16:30:31,986-INFO: testing 3000/3769, dt: 0.201, eta: 2.6m Evaluation Finished!
预模型 output/kitti_3d_multi_warmup/weights/iter50000.0_params.pdparams 效果
Car
| Easy | Mod | Hard | |
|---|---|---|---|
| 2D detection | 87.27 | 81.74 | 66.60 |
| 3D BEV | 24.93 | 18.58 | 16.69 |
| 3D detection | 19.10 | 15.69 | 13.15 |
Ped
| Easy | Mod | Hard | |
|---|---|---|---|
| 2D detection | 72.47 | 58.28 | 50.07 |
| 3D BEV | 4.12 | 4.55 | 3.44 |
| 3D detection | 3.77 | 3.45 | 3.07 |
Cyclist
| Easy | Mod | Hard | |
|---|---|---|---|
| 2D detection | 63.97 | 45.97 | 39.73 |
| 3D BEV | 11.72 | 10.16 | 10.16 |
| 3D detection | 10.56 | 10.07 | 10.07 |
7. 模型推理
推理过程包括两个步骤:1)导出推理模型 2)执行推理代码
导出推理模型
PaddlePaddle 框架保存的权重文件分为两种:支持前向推理和反向梯度的训练模型和只支持前向推理的推理模型。二者的区别是推理模型针对推理速度和显存做了优化,裁剪了一些只在训练过程中才需要的 tensor,降低显存占用,并进行了一些类似层融合,kernel 选择的速度优化。因此可执行如下命令导出推理模型。
In [14]
! python export_model.py \
--conf_path output/kitti_3d_multi_warmup/conf.pkl \
--weights_path output/kitti_3d_multi_warmup/weights/iter50000.0_params.pdparams生成的推理模型位于 inference 目录,里面包含三个文件,分别为
- inference.pdmodel
- inference.pdiparams
- inference.pdiparams.info。
其中 inference.pdmodel 用来存储推理模型的结构, inference.pdiparams 和 inference.pdiparams.info 用来存储推理模型相关的参数信息。
结果保存在 inference_result 目录下。
In [16]
! python infer.py \
--conf_path output/kitti_3d_multi_warmup/conf.pkl/opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/__init__.py:107: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import MutableMapping /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/rcsetup.py:20: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import Iterable, Mapping /opt/conda/envs/python35-paddle120-env/lib/python3.7/site-packages/matplotlib/colors.py:53: DeprecationWarning: Using or importing the ABCs from 'collections' instead of from 'collections.abc' is deprecated, and in 3.8 it will stop working from collections import Sized W0607 08:43:10.540436 17651 device_context.cc:447] Please NOTE: device: 0, GPU Compute Capability: 7.0, Driver API Version: 11.2, Runtime API Version: 10.1 W0607 08:43:10.544229 17651 device_context.cc:465] device: 0, cuDNN Version: 7.6.
In [15]
! python vis.py