1.Explore the effect of negative roll, pitch or yaw angles. Does transforming from RPY angles to rotation matrix then back to RPY angles give a different result to the starting value as it does for Euler angles?
fprintf('\n Question 1:\n');
f_origin=eye(3,3);
rpy=[-0.1,-0.2,0.3]
rpy2R = rpy2r(-0.1,-0.2, 0.3) % rpy-> R, 'XYZ'
R2rpy = tr2rpy(rpy2R) %R -> rpy
trplot(f_origin,'color', 'r','frame','O');hold on;
trplot(rpy2R, 'color', 'g','frame','1');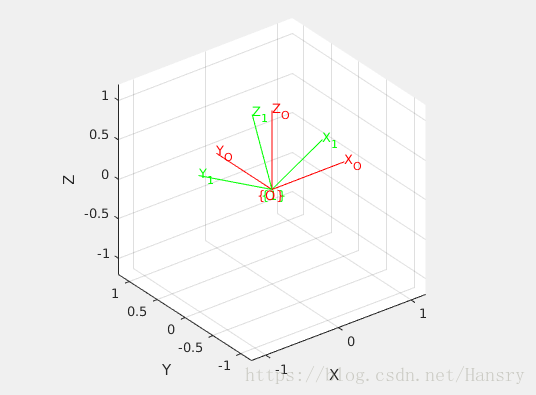
Answer:
As for Euler angles, we kown that mapping from rotation matrix to Euler angle is not unique. But there will not have multiple solutions from rotation matrix to roll-pitch-yaw angle, thanks to roll-pitch-yaw sequence allows all angles to have arbitrary sign. Unfortunately, roll-pitch-yaw has a singularity when
.
2.Explore the many options associated with trplot.
fprintf('\n Question 2:\n');
T_origin=eye(4,4);trplot(T_origin,'frame','O','color','red');hold on; %define a identity matrix as the reference frame called {0}
T_A=T_origin*trotx(pi/4)*transl(0,0.5,0); %rotate by 45 degress about the X axis, then a walk of 0.5 unit along the new y-axis
trplot(T_A,'frame','A','color','g'); %frame{A}
T_B=T_origin*trotx(pi/4)*transl(-0.5,0,0);
trplot(T_B, 'frame', 'B', 'text_opts', {'FontSize', 10, 'FontWeight', 'bold'}); %change the parameter of text, frame{B}
T_C=T_origin*trotx(pi/4)*transl(0,0,0.4);
h = trplot(T_C, 'frame', 'C', 'color', 'y');
trplot(h, T_C); %frame{C}
fprintf('\n The figure shows different result by changing the parameters of trplot \n')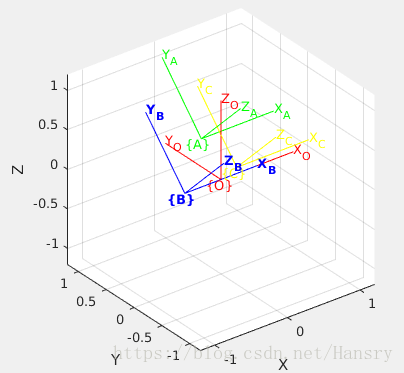
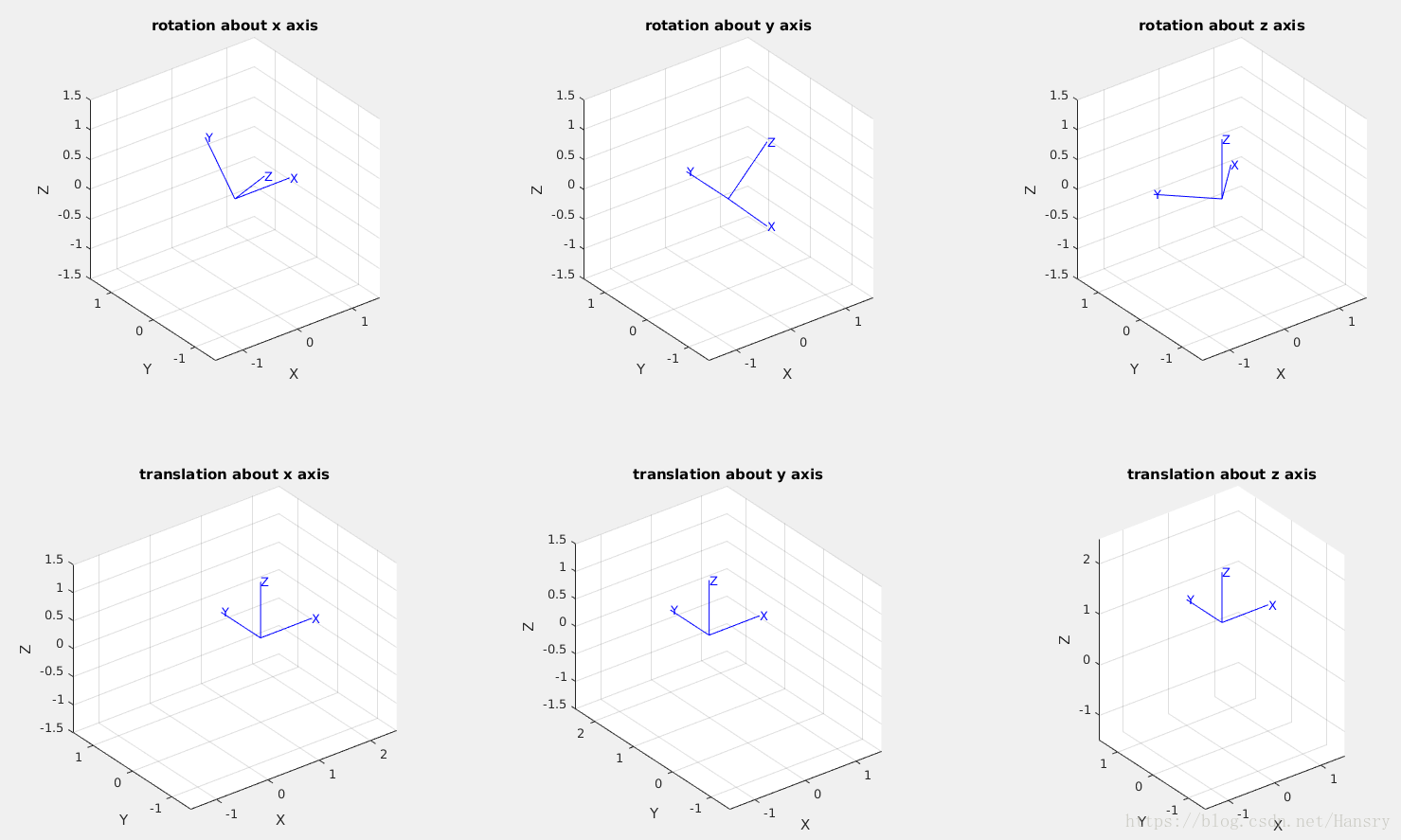
3.Use tranimate to show translation and rotational motion about various axes.
fprintf('\n Question 3:\n');
fprintf('\n The figure shows translation and rotational motion about various axes\n')
R_x=trotx(pi/4); %Rotation
R_y=troty(pi/4);
R_z=trotz(pi/4);
subplot(231),title('rotation about x axis'),tranimate(R_x,'nsteps',20);
subplot(232),title('rotation about y axis'),tranimate(R_y,'nsteps',20);
subplot(233),title('rotation about z axis'),tranimate(R_z,'nsteps',20);
t_x=transl(1,0,0); %translation
t_y=transl(0,1,0);
t_z=transl(0,0,1);
subplot(234),title('translation about x axis'),tranimate(t_x,'nsteps',20);
subplot(235),title('translation about y axis'),tranimate(t_y,'nsteps',20);
subplot(236),title('translation about z axis'),tranimate(t_z,'nsteps',20);Running the code to see the motion of all the transformation.
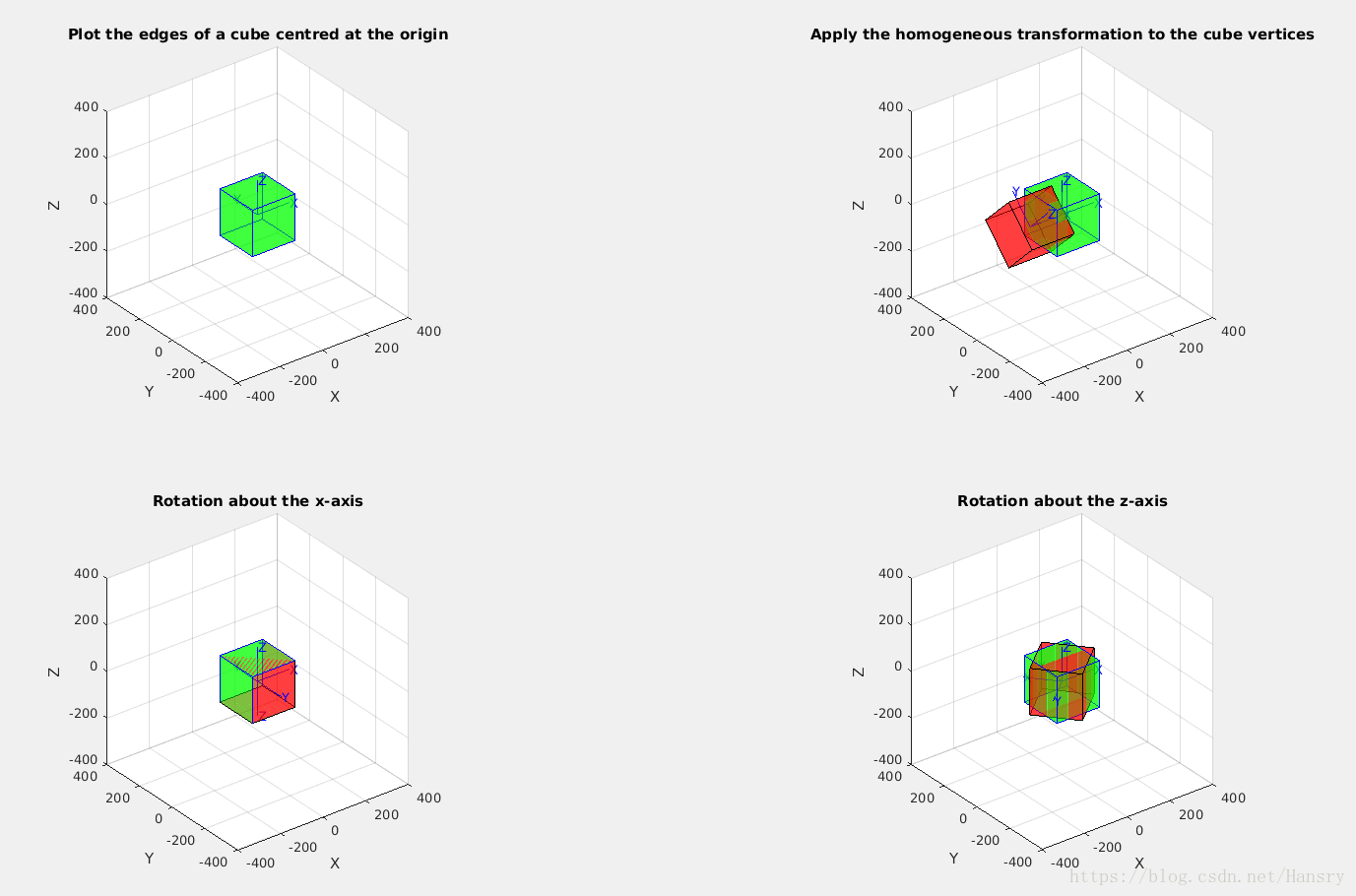
4. Animate a tumbling cube
a) Write a function to plot the edges of a cube centred at the origin.
b) Modify the function to accept an argument which is a homogeneous transformation which is applied to the cube vertices before plotting.
c) Animate rotation about the x-axis.
d) Animate rotation about all axes
plot_cube.m
function y=plot_cube(size,rotation_step,T_A)
origin=[0,0,0]; %To setup the origin of cube
x_orig= [0 1 1 0 0 0; % -100 100 100 -100 -100 -100
1 1 0 0 1 1; % 100 100 -100 -100 100 100
1 1 0 0 1 1; % 100 100 -100 -100 100 100
0 1 1 0 0 0]; % -100 100 100 -100 -100 -100
x_orig=(x_orig-0.5)*size+origin(1); % the x coordinate of all the cube vertices
y_orig= [0 0 1 1 0 0;
0 1 1 0 0 0;
0 1 1 0 1 1;
0 0 1 1 1 1];
y_orig=(y_orig-0.5)*size+origin(2); % The same as the x_orig, but has different values
z_orig= [0 0 0 0 0 1;
0 0 0 0 0 1;
1 1 1 1 0 1;
1 1 1 1 0 1];
z_orig=(z_orig-0.5)*size+origin(3); % The same as the x_orig, but has different values
subplot(221);T_origin=eye(4,4);trplot(T_origin,'color','b','length',150);
title('Plot the edges of a cube centred at the origin');hold on;
%plot the edges of a cube centred at the origin
for i=1:6
h=patch(x_orig(:,i),y_orig(:,i),z_orig(:,i),'g'); %Each face has four vertices and each cube has six faces,
set(h,'edgecolor','b','facealpha',0.5); % so the number of vertices we needed is 4x6=24
end
axis equal
axis([-400 400 -400 400 -400 400]);
%%Apply the homogeneous transformation to the cube vertices
x_t=x_orig;y_t=y_orig;z_t=z_orig;
subplot(222);title('Apply the homogeneous transformation to the cube vertices');
transformation_cube(false,rotation_step,'x',T_A,x_t,y_t,z_t);
%%Rotation about the x-axis
x_r=x_orig;y_r=y_orig;z_r=z_orig;
subplot(223);title('Rotation about the x-axis');
transformation_cube(true,rotation_step,'x',T_A,x_r,y_r,z_r);
%%Rotation about the z-axis, here I can change the axis
x_r=x_orig;y_r=y_orig;z_r=z_orig;
subplot(224);title('Rotation about the z-axis');
transformation_cube(true,rotation_step,'z',T_A,x_r,y_r,z_r);
end
% First paparmeter: is it necessary to rotate? true or false
% rotation_setp: the step of rotation
% 'x': ratate about which axis.
% T_A: the homogeneous matrix which applys to the transformation
% x_t,y_t,z_t: the cube vertices
function transformation_cube(is_rotation,rotation_step,axes,T,x_orig,y_orig,z_orig)
T_origin=eye(4,4);
if is_rotation == false
rotation_step=pi/2;
end
for step=0:rotation_step:pi
x_r=x_orig;y_r=y_orig;z_r=z_orig;
if is_rotation
if axes=='x'
T_tr=trotx(step);
elseif axes=='y'
T_tr=troty(step);
elseif axes=='z'
T_tr=trotz(step);
end
else
T_tr=T;
end
for i=1:6
for j=1:4
point_t=[x_r(j,i),y_r(j,i),z_r(j,i)];point_t=point_t';
point_hat=e2h(point_t);
point_trans=h2e(T_tr*point_hat)';
x_r(j,i)=point_trans(1);
y_r(j,i)=point_trans(2);
z_r(j,i)=point_trans(3);
end
q=patch(x_r(:,i),y_r(:,i),z_r(:,i),'r');
set(q,'edgecolor','k','facealpha',0.5);
p=patch(x_orig(:,i),y_orig(:,i),z_orig(:,i),'g');
set(p,'edgecolor','b','facealpha',0.5);
end
%subplot(plot_local);title('Rotation about the x-axis');
R=T_tr*T_origin;
trplot(R,'color','b','length',150),trplot(T_origin,'color','b','length',150);hold on;
axis equal
axis([-400 400 -400 400 -400 400]) % set the range of each axis: x(-400,400), y(-400,400), z(-400,400)
grid on;
if is_rotation
getframe;
if step<pi-0.1 %To keep the last frame
cla;
end
end
end
endfprintf('\n Question 4:\n');
fprintf('\n The figure shows translation and rotational motion of the cube about various axes\n')
size=200; %the size of the cube edge
rotation_step=10*pi/180; %the ratation setp of the cube
T_A=trotx(pi/4)*transl(-150,0,0);
plot_cube(size,rotation_step,T_A); % plot the edges of a cube centred at the origin.Running the code to see the motion of all the transformation
5.Question Using Eq. 2.21 show that TT^{−1}=I.
fprintf('\n Question 5:\n');
T_5=trotx(pi/4)*troty(pi/4)*transl(0.3,0,0.3); % Here we define T as T_5.
trplot(T_origin,'frame','O','color','red');hold on;
T_1=T_5*T_origin;trplot(T_1,'frame','1','color','g');
T_5_inv=inv(T_5); %T_5_inv=T_5^{-1}
T_2= (T_5_inv)*T_1;trplot(T_2,'frame','2','color','b');
%%%Answer:
% From the figure, we can see that f_{1}=T_5*f_{0},
% f_{2}=T_5^{-1}*f_{1},so we get f_{2}=T_5^{-1}*T_5*f_{0} and f_{0}=f_{2},
% so here T_5^{-1}*T_5 = I
fprintf('\n The figure demostrates the equation TT^{−1}=I\n')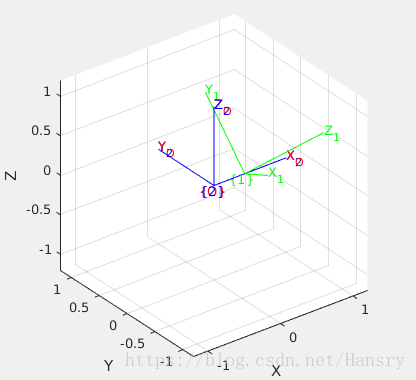
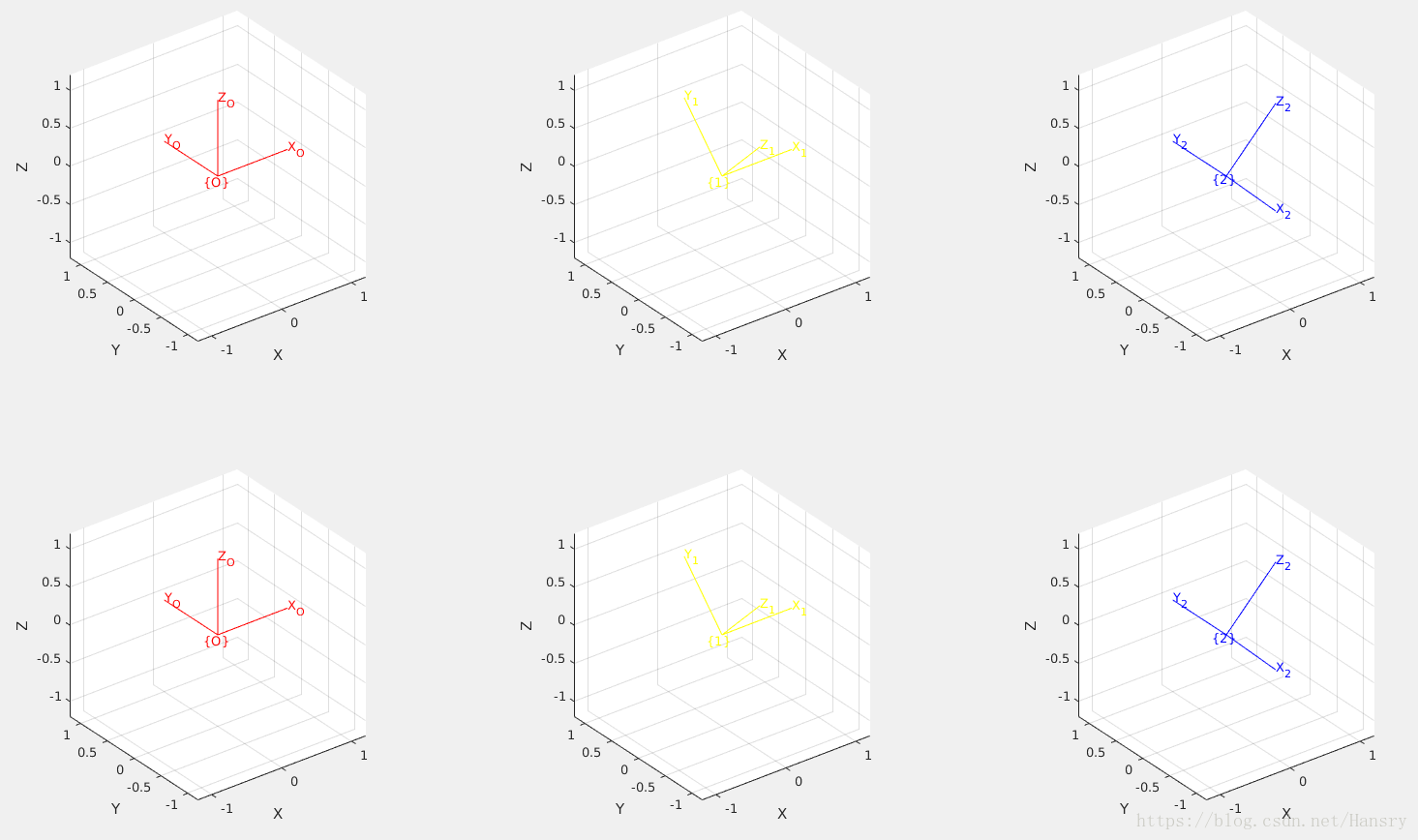
6.Generate the sequence of plots shown in Fig. 2.11
fprintf('\n Question 6:\n');
R=eye(3,3);subplot(231);trplot(R,'frame','O','color','red');hold on;
R_x1=rotx(pi/2);subplot(232);trplot(R_x,'frame','1','color','yellow');
R_y1=rotx(pi/2)*roty(pi/2);subplot(233);trplot(R_y,'frame','2','color','blue');
subplot(234);trplot(R,'frame','O','color','red');hold on;
R_x2=roty(pi/2);subplot(235);trplot(R_x,'frame','1','color','yellow');
R_y2=roty(pi/2)*rotx(pi/2);subplot(236);trplot(R_y,'frame','2','color','blue');
fprintf('\n The figure shows the sequence of plots shown in Fig. 2.11\n')Answer:
Note that the different orders of rotation will produce the different results.
7.Where is Descarte’s skull?
fprintf('\n Question 7:\n');
fprintf('\nI do not konw the extactly meaning of this question, but literally, the skull of Descarte is located in Museum of Man, Paris.\n');8.Create a vector-quaternion class that supports composition, negation and point transformation.
VectorQuaternion.m (创建一个类)
classdef VectorQuaternion
properties (SetAccess = private) %set the inner variables as private
vector
Quaternion
end
methods
function z=VectorQuaternion(q,t) %constructor
z.vector=t;
z.Quaternion=q;
end
function qp = plus(z1, z2) %composition. See section 2.2.2, Page 36 and 37 of English version
if isa(z1, 'VectorQuaternion') && isa(z2, 'VectorQuaternion')
qp.vector = z1.vector + z1.Quaternion*z2.vector; %t_{1}+\dot{q}_{1}*t^{2}
qp.Quaternion.s=z1.Quaternion.s*z2.Quaternion.s-dot(z1.Quaternion.v,z2.Quaternion.v); % s_{1}*s_{2}-v_{1}*v_{2}
% s_{1}*v_{2}+s_{2}*v_{1}+v_{1}X v_{2}
qp.Quaternion.v=z1.Quaternion.s*z2.Quaternion.v+z2.Quaternion.s*z1.Quaternion.v+cross(z1.Quaternion.v,z2.Quaternion.v);
else
error('bad argument for function of VectorQuaternion');
end
end
function q1=neg(z1) %Negation.
if isa(z1, 'VectorQuaternion')
q1.vector=(-1)*(inv(z1.Quaternion))*z1.vector; % -\dot{q}^{-1}*t
q1.Quaternion=inv(z1.Quaternion); % \dot{q}^{-1}
else
error('bad argument for function of VectorQuaternion');
end
end
function transform=vqtran(py,z2) %transformation for point
if isa(z2, 'VectorQuaternion') && (length(py)==3)
transform=z2.Quaternion*py+z2.vector; %P_{x}=\dot{q}*P_{y}+t
else
error('unknown dimension of input or bad argument for function of VectorQuaternion')
end
end
end
endfprintf('\n Question 8:\n');
point3f=[1.0,1.5,2.0]';
fprintf('\n Declare two VectorQuaternion type variables:\n')
quant1=Quaternion(rpy2tr(0.1,0.2,0.3));t1=[0,0.4,0.4]';
quant2=Quaternion(rpy2tr(0.0,0.2,0.3));t2=[0.4,0,0.4]';
VectorQuaternion1=VectorQuaternion(quant1,t1) %VectorQuanternion(q,t), where q is a quaternion type variable,
VectorQuaternion2=VectorQuaternion(quant2,t2) %while t is a 3x1 vector .
fprintf('\n Composite quant1 and quant2:\n');
composition=plus(VectorQuaternion1,VectorQuaternion2) %VectorQuaternion1+VectorQuaternion2
fprintf('\n Negation of quant1 and quant2:\n');
negation1=neg(VectorQuaternion1) % neg(vq) %where vq is a VectorQuaternion type variable
negation2=neg(VectorQuaternion2)
fprintf('\n Point transformation of quant1 and quant2\n')
p_t1=vqtran(point3f,VectorQuaternion1) % vqtran(p,vq) where p is a point3f(3x1 vector) avaliable, vq is a VetctorQuaternion
p_t2=vqtran(point3f,VectorQuaternion2) % avariable, which indicts the transformation.Result:
Declare two VectorQuaternion type variables:
VectorQuaternion1 =
VectorQuaternion with properties:
vector: [3x1 double]
Quaternion: [1x1 Quaternion]
VectorQuaternion2 =
VectorQuaternion with properties:
vector: [3x1 double]
Quaternion: [1x1 Quaternion]
Composite quant1 and quant2:
composition =
vector: [3x1 double]
Quaternion: [1x1 struct]
Negation of quant1 and quant2:
negation1 =
vector: [3x1 double]
Quaternion: [1x1 Quaternion]
negation2 =
vector: [3x1 double]
Quaternion: [1x1 Quaternion]
Point transformation of quant1 and quant2
p_t1 =
0.8992
1.9344
2.4217
p_t2 =
1.2992
1.7285
2.2584上述答案为根据自己对该章知识的学习以及总结,可能存在不足的地方,希望各位博友能够指出问题,谢谢!