以下是数据结构中关于深度优先遍历无向连通图的操作(编程风格参考严蔚敏版数据结构)。
其实深度优先遍历就是二叉树的先序遍历的推广。
头文件以及宏定义
#include<iostream>
#include<stdio.h>
using namespace std;
typedef char VerTexType;
typedef int ArcType;
#define MaxInt 32767
#define MVNum 100
#define OK 1
#define ERROR -1;
bool visited[MVNum];
说明: VerTexType; //代表节点变量的类型(一般我们用ABCD表示节点,所以用char) typedef int
ArcType; // 代表边变量的类型(肯定用长度表示边呀,所以用int或者double都可)
#define MaxInt 32767 //边的最大值(表示目标不可达)
#define MVNum 100 //最大节点数
bool visited[MVNum];//标记访问记录的数组;宏定义会自动赋值为0
无向图结构体的定义
typedef struct{
VerTexType vexs[MVNum] {
'A','B','C','D','E','F','G','H'};//节点表
ArcType arcs[MVNum][MVNum];//邻接表(肯定是个正方形的矩阵)
int vexnum = 8,arcnum = 9;//该邻接矩阵的节点数、边数
}AMGraph;
说明:
为了演示方便,就直接写死节点名称、节点数和边数了。有需要时自行修改即可。
创建无向图
status CreateUDN(AMGraph &G){
//创建无向图
for(int i=0;i<G.vexnum;i++){
for(int j=0;j<G.vexnum;j++){
if(i==j){
G.arcs[i][j] = 0;//自己到自己的距离为0
}else
G.arcs[i][j] = MaxInt;//初始状态全部节点之间相互不可达
}
}
G.arcs[0][1]=1;
G.arcs[0][2]=1;
G.arcs[1][3]=1;
G.arcs[1][4]=1;
G.arcs[2][5]=1;
G.arcs[2][6]=1;
G.arcs[3][7]=1;
G.arcs[4][7]=1;
G.arcs[5][6]=1;
for(int i=0;i<G.vexnum;i++){
for(int j=i+1;j<G.vexnum;j++){
if(G.arcs[i][j]==1){
G.arcs[j][i] = 1;
}
}
}//矩阵对称,生成矩阵下三角
return OK;
}
说明:
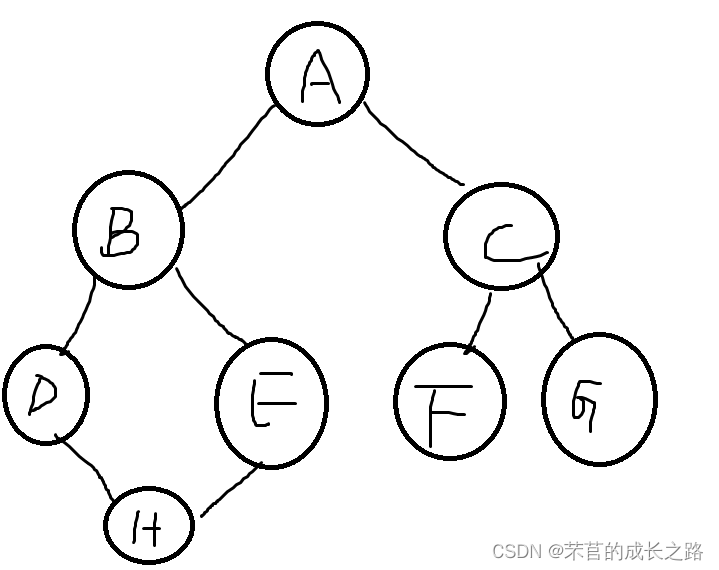
这个邻接表的设置(即节点之间边的设置)如下图所示:
对称矩阵的生成,只需要把下标i和j置换即可。
DFS(深度优先遍历)核心代码
void DFS(AMGraph &G,VerTexType v){
//节点v
int vi = LocateVex(G,v);//v(v-index)的下标
cout<<G.vexs[vi]<<" ";//输出当前节点
visited[vi] = true;//已访问
for(int vn=FirstAdjVex(G,v);vn>=0;vn=NextAdjVex(G,v,vn)){
//vn(v-next)表示v的全部邻接点的下标(如果vn<0表示不存在邻接点)
if(!visited[vn]){
//当前邻接点未被访问过,那就访问该节点
VerTexType V = Transform(G,vn);//将该下标转回节点名称进行迭代
DFS(G,V);
}
}
}
说明:
vi(v-index)表示v的下标
vn(v-next)表示v的全部邻接点的下标(如果vn<0表示不存在邻接点)
因为这里DFS第二个参数类型是节点而不是下标,所以获取邻接节点下标后要转回节点V的形式递归调用DFS;
FirstAdjVex(G,v)获取v的第一个邻接节点
NextAdjVex(G,v,vn)依次获取v的每个邻接节点的下标
获取节点下标
int LocateVex(AMGraph G, VerTexType v){
int i;
for(i=0;i<G.vexnum;i++){
if(G.vexs[i]==v){
return i;
}
}
return ERROR;
}
将下标转换成节点
VerTexType Transform(AMGraph G, int vn){
return G.vexs[vn];
}
获取当前的第一个邻接节点以及全部邻接节点下标
int FirstAdjVex(AMGraph G,VerTexType v){
//v的第一个邻接点
int vi = LocateVex(G,v);
for(int i=0;i<G.vexnum;i++){
if(!visited[i]&&G.arcs[vi][i]==1){
return i;//找到邻接点且此邻接点未被访问过
}
}
return ERROR;//未找到邻接点
}
int NextAdjVex(AMGraph G,VerTexType v ,int vn){
//v相对于vn的下一个邻接点
int vi = LocateVex(G,v);
for(int i=vn+1;i<G.vexnum;i++){
if(!visited[i]&&G.arcs[vi][i]==1){
return i;//找到邻接点且此邻接点未被访问过
}
}
return ERROR;//未找到下一个邻接点
}
注意:获取下一个邻接节点不需要从0开始遍历,从上一个邻接节点的下标开始遍历即可。
输出邻接表
void ShowGraph(AMGraph G){
cout<<" ";
for(int i=0;i<G.vexnum;i++){
cout<<" "<<G.vexs[i];
}
cout<<endl;
for(int i=0;i<G.vexnum;i++){
cout<<G.vexs[i]<<" ";
for(int j=0;j<G.vexnum;j++){
if(G.arcs[i][j]==MaxInt){
cout<<"* ";
}else{
cout<<G.arcs[i][j]<<" ";
}
}
cout<<endl;
}
}
源码执行结果:
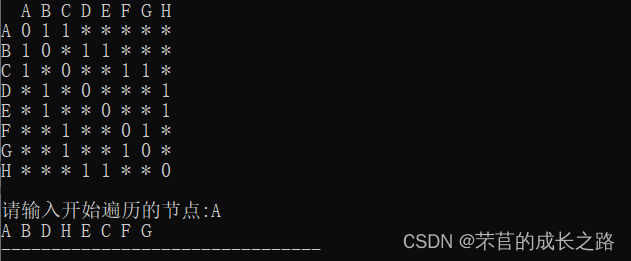
执行过程:
A的第一个邻接节点为B,此时A访问过了(输出A),去访问B
B的第一个邻接节点为A,但是A和B都访问过了(输出B),往右寻找:D节点未被访问过,去访问D;
D被访问(输出D),D的第一个邻接节点是B(已访问),向右寻找:寻到为被访问过的H;
访问H(输出H),H的第一个邻接节点为D(已访问),向右寻找:寻到E;
访问E(输出E),此时E的邻接点B和H都已访问。
还记得DFS里循环的这行代码吗?
for(int vn=FirstAdjVex(G,v);vn>=0;vn=NextAdjVex(G,v,vn))
刚才就是执行了vn=FirstAdjVex(G,v)这一次循环迭代DFS的过程,然后我们执行vn=NextAdjVex(G,v,vn)的循环迭代DFS的过程。
此时vn = 2(也就是对应C),C未被访问过,访问C;
访问C(输出C),C的第一个邻接节点是A(已访问),向右寻找:寻找到F未被访问过,访问F;
访问F(输出F),F的第一个邻接节点是C(已访问),向右寻找:寻找到G未被访问过,访问G。
访问G(输出G),此时G的邻接节点C和F全部都被访问过了,本次循环结束。
接下来的循环还在进行,但是全部节点都已经被访问过了,就不会输出了,直到嵌套的循环全部跑完,程序结束。
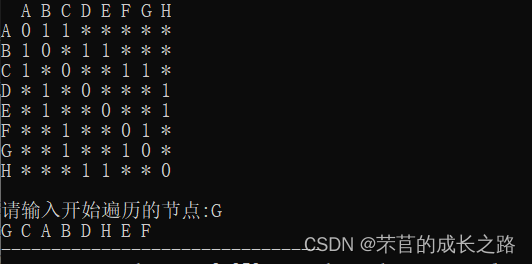
换个起始点一样适用

完整源代码
#include<iostream>
#include<stdio.h>
using namespace std;
typedef char VerTexType; //代表节点变量的类型(一般我们用ABCD表示节点,所以用char)
typedef int ArcType; // 代表边变量的类型(肯定用长度表示边呀,所以用int或者double都可)
#define MaxInt 32767 //边的最大值(表示目标不可达)
#define MVNum 100 //最大节点数
#define OK 1
#define ERROR -1;
typedef int status;
bool visited[MVNum];//标记访问记录的数组;宏定义会自动赋值为0
typedef struct{
VerTexType vexs[MVNum] {
'A','B','C','D','E','F','G','H'};//节点表
ArcType arcs[MVNum][MVNum];//邻接表(肯定是个正方形的矩阵)
int vexnum = 8,arcnum = 9;//该邻接矩阵的节点数、边数
}AMGraph;
int LocateVex(AMGraph G, VerTexType v){
int i;
for(i=0;i<G.vexnum;i++){
if(G.vexs[i]==v){
return i;
}
}
return ERROR;
}
status CreateUDN(AMGraph &G){
//创建无向图
for(int i=0;i<G.vexnum;i++){
for(int j=0;j<G.vexnum;j++){
if(i==j){
G.arcs[i][j] = 0;
}else
G.arcs[i][j] = MaxInt;//初始状态全部节点之间相互不可达
}
}
G.arcs[0][1]=1;
G.arcs[0][2]=1;
G.arcs[1][3]=1;
G.arcs[1][4]=1;
G.arcs[2][5]=1;
G.arcs[2][6]=1;
G.arcs[3][7]=1;
G.arcs[4][7]=1;
G.arcs[5][6]=1;
for(int i=0;i<G.vexnum;i++){
for(int j=i+1;j<G.vexnum;j++){
if(G.arcs[i][j]==1){
G.arcs[j][i] = 1;
}
}
}//矩阵对称
return OK;
}
void ShowGraph(AMGraph G){
cout<<" ";
for(int i=0;i<G.vexnum;i++){
cout<<" "<<G.vexs[i];
}
cout<<endl;
for(int i=0;i<G.vexnum;i++){
cout<<G.vexs[i]<<" ";
for(int j=0;j<G.vexnum;j++){
if(G.arcs[i][j]==MaxInt){
cout<<"* ";
}else{
cout<<G.arcs[i][j]<<" ";
}
}
cout<<endl;
}
}
VerTexType Transform(AMGraph G, int vn){
return G.vexs[vn];
}
int FirstAdjVex(AMGraph G,VerTexType v){
//v的第一个邻接点
int vi = LocateVex(G,v);
for(int i=0;i<G.vexnum;i++){
if(!visited[i]&&G.arcs[vi][i]==1){
return i;//找到邻接点且此邻接点未被访问过
}
}
return ERROR;//未找到邻接点
}
int NextAdjVex(AMGraph G,VerTexType v ,int vn){
//v相对于vn的下一个邻接点
int vi = LocateVex(G,v);
for(int i=vn+1;i<G.vexnum;i++){
if(!visited[i]&&G.arcs[vi][i]==1){
return i;//找到邻接点且此邻接点未被访问过
}
}
return ERROR;//未找到下一个邻接点
}
void DFS(AMGraph &G,VerTexType v){
//节点v
int vi = LocateVex(G,v);//vi(v-index)的下标
cout<<G.vexs[vi]<<" ";//输出当前节点
visited[vi] = true;//已访问
for(int vn=FirstAdjVex(G,v);vn>=0;vn=NextAdjVex(G,v,vn)){
//vn(v-next)表示v的全部邻接点的下标(如果vn<0表示不存在邻接点)
// cout<<vn<<"\n";
if(!visited[vn]){
//当前邻接点未被访问过
VerTexType V = Transform(G,vn);//将该下标转回节点名称进行迭代
DFS(G,V);
}
}
}
int main(){
AMGraph G;
CreateUDN(G);
ShowGraph(G);
VerTexType V;
cout<<"\n请输入开始遍历的节点:";
cin>>V;
DFS(G,V);
return 0;
}
敬请批评指正!