首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
delmia机器人自由度调节
企业开发
2023-06-04 22:24:51
阅读次数: 0
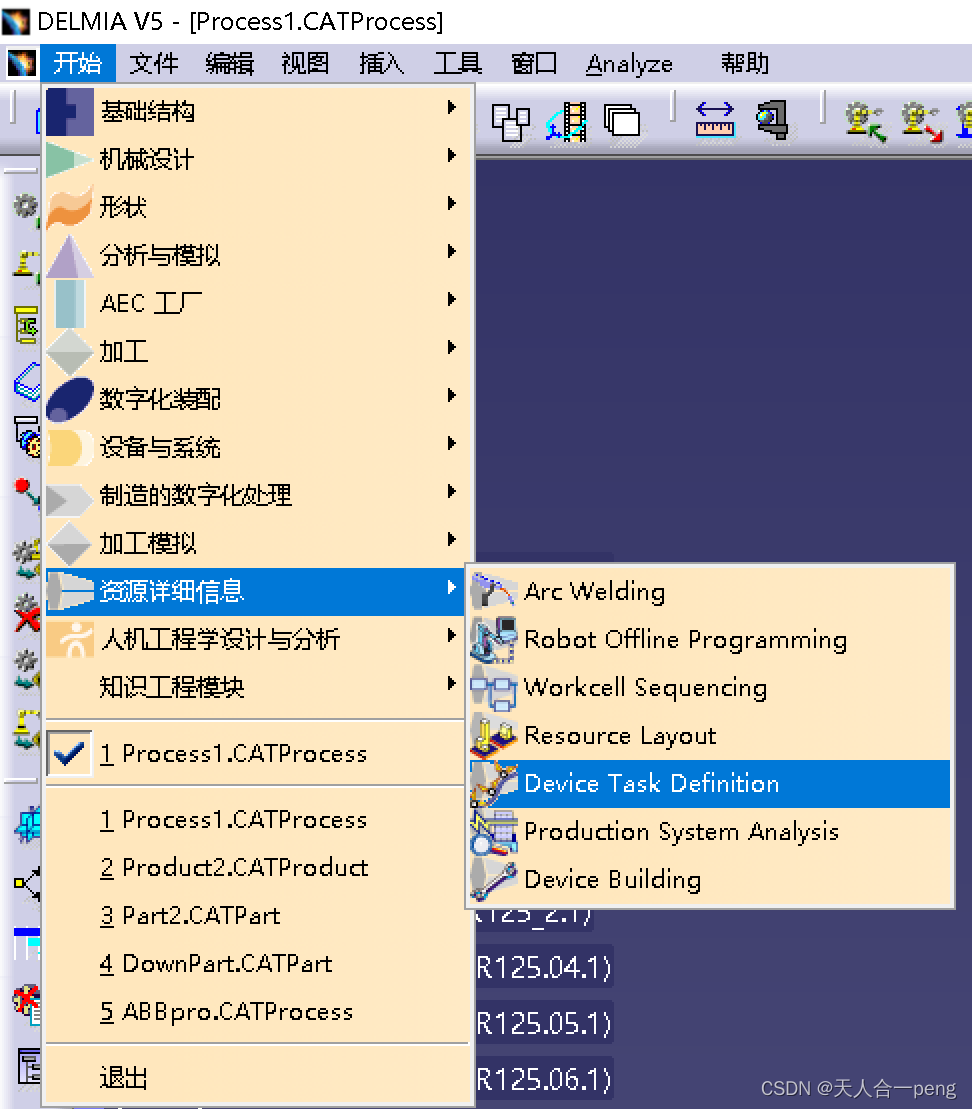
要进入device task definition
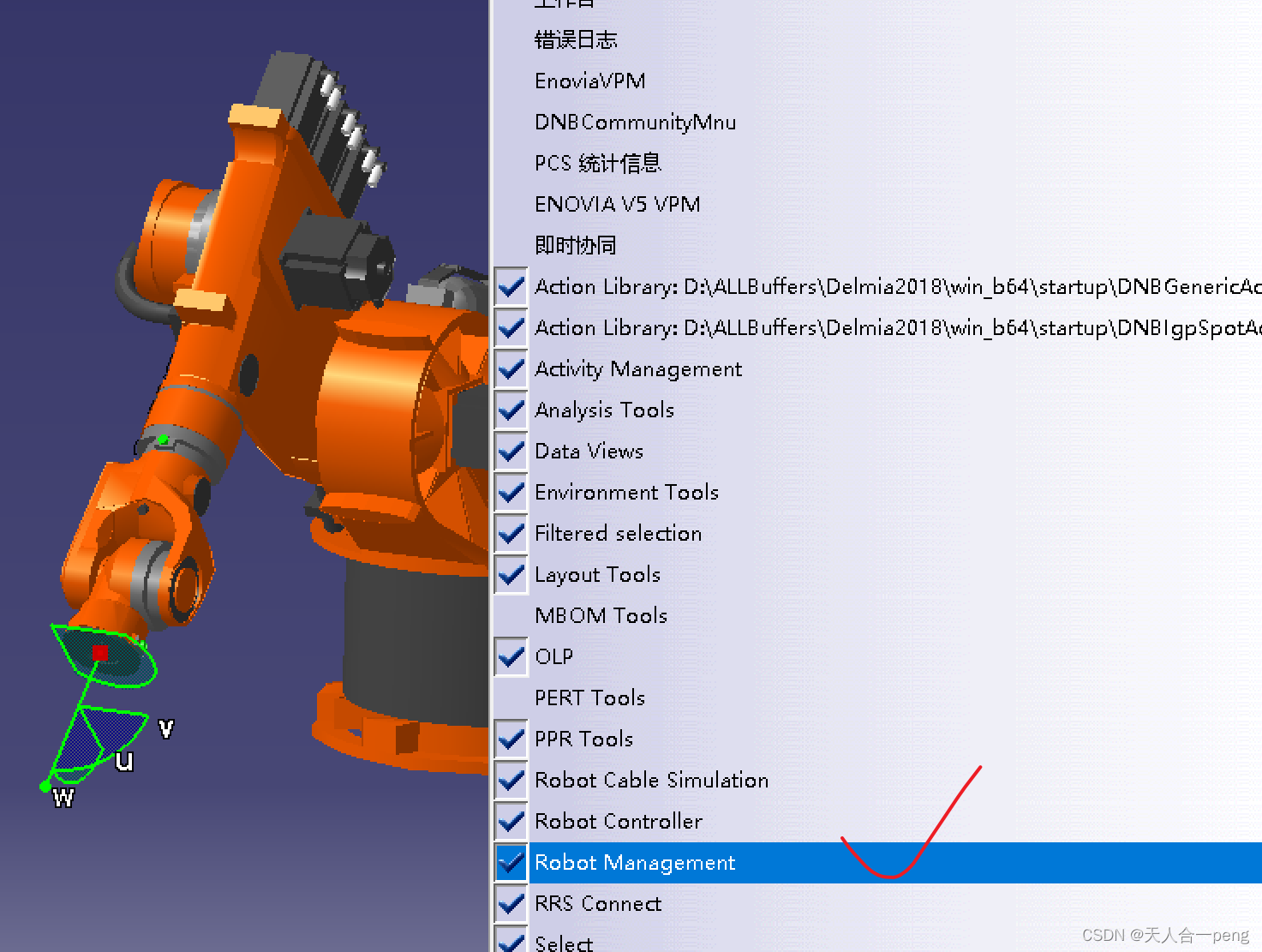
调出--机器人管理模块---
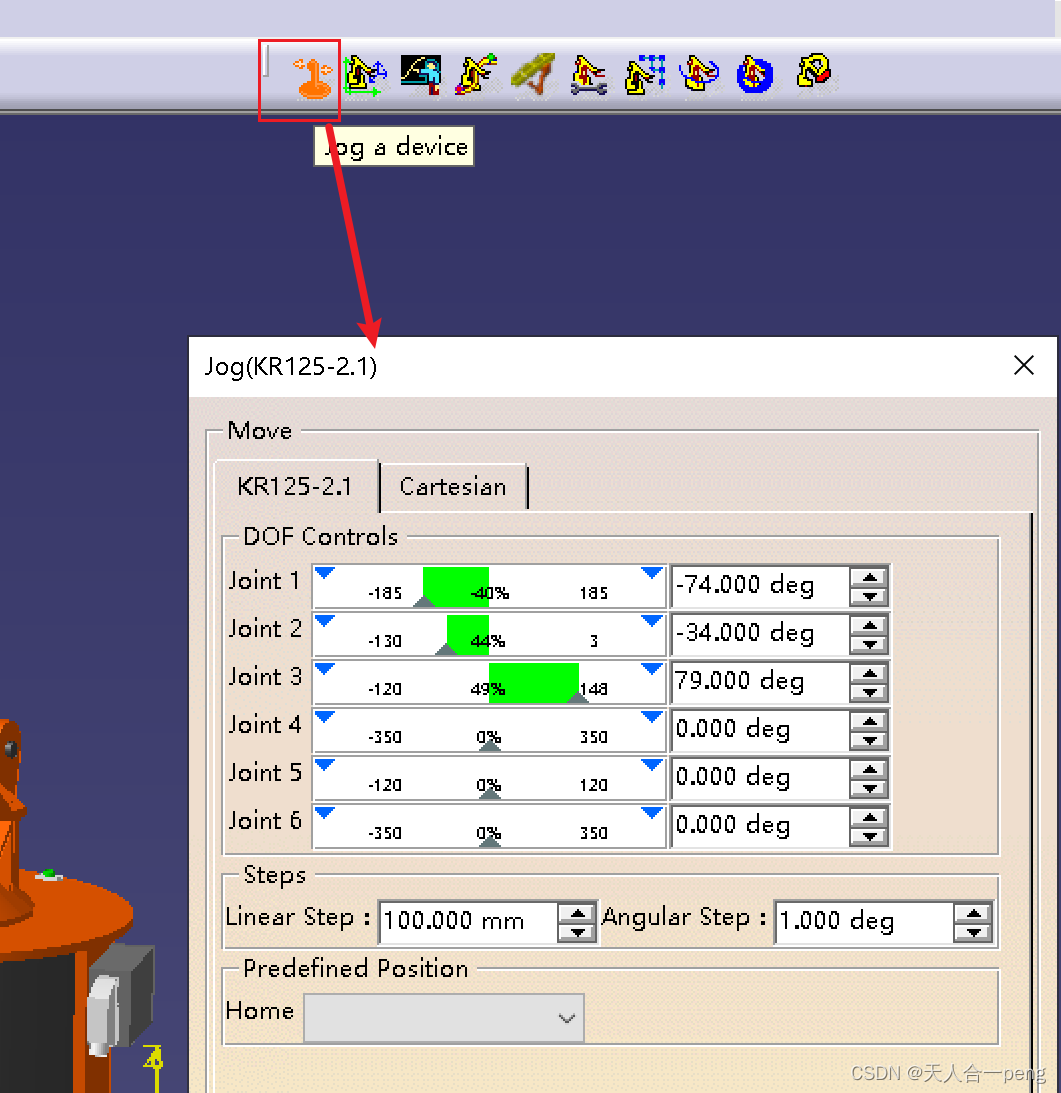
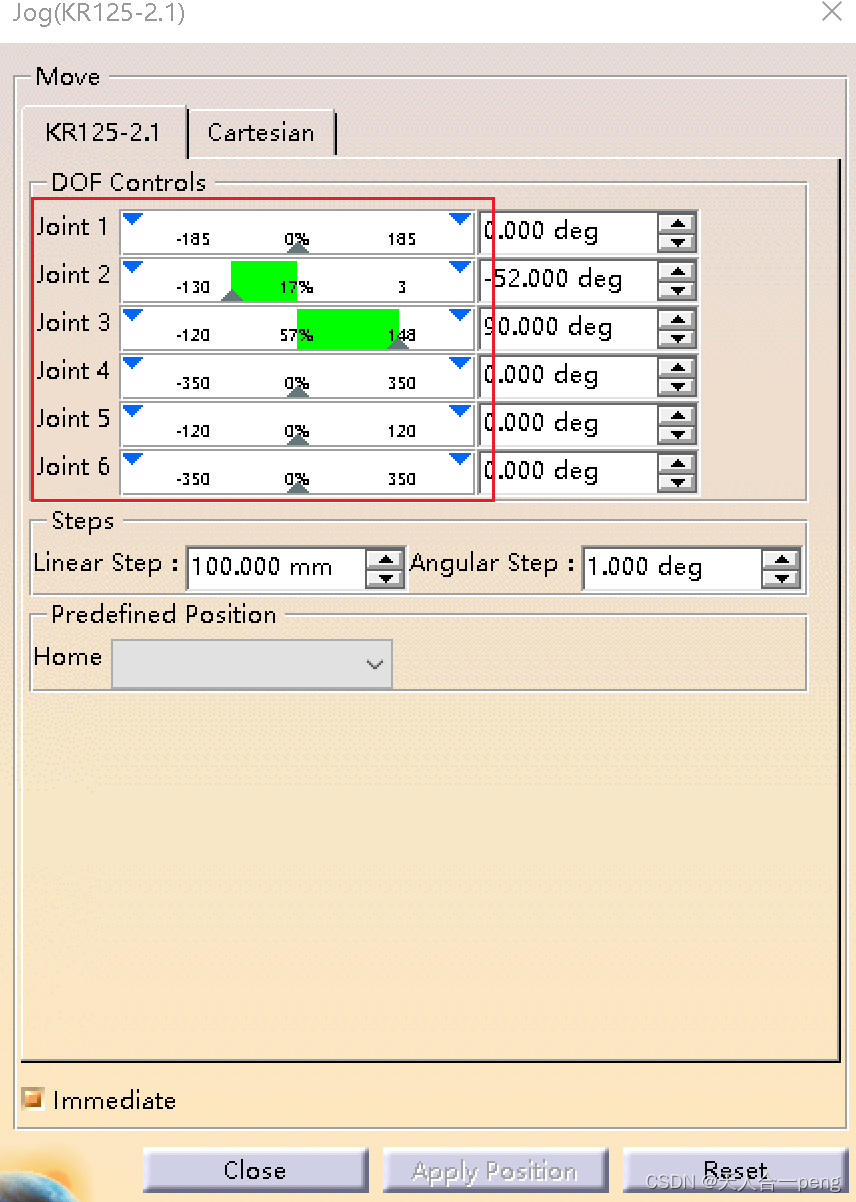
选中机器人,然后点
这样就可以对6个环节调节了,机器人会动起来
猜你喜欢
转载自
blog.csdn.net/moonlightpeng/article/details/130893823
delmia机器人自由度调节
4自由度臂型机器人MATLAB仿真
【Matlab 六自由度机器人】系列文章汇总
【Matlab 六自由度机器人】运动学正解(附MATLAB机器人正解完整代码)
六自由度机器人关节坐标系变换及机器人工具TCP
机器人运动学与动力学入门(一)自由度与连杆机构
【SCARA】基于Robotics工具箱的四自由度SCARA机器人建模matlab仿真
六自由度机器人(机械臂)运动学建模及运动规划系列(四)——轨迹规划
六自由度机器人(机械臂)运动学建模及运动规划系列(一)——简介
【Matlab 六自由度机器人】关于双变量函数atan2(x,y)的解释
【Matlab 六自由度机器人】关于灵活工作空间与可达工作空间的理解(附MATLAB推导代码)
【Matlab 六自由度机器人】运动学逆解(附MATLAB机器人逆解代码)
六自由度机器人(机械臂)运动学建模及运动规划系列(三)——机器人建模及运动学分析的Matlab仿真
【Matlab 六自由度机器人】关于机器人运动学反解的有关问题
【Matlab 六自由度机器人】定义标准型及改进型D-H参数建立机器人模型(附MATLAB建模代码)
【Matlab 六自由度机器人】基于蒙特卡罗方法(Monte Carlo Method)构建机器人工作空间(附MATLAB建模仿真完整代码)
DELMIA软件:机器人搬运仿真
delmia机器人模型调入
delmia机器人建模与装配
delmia机器人示教01
机器人学基础(3)-动力学分析和力-拉格朗日力学、机器人动力学方程建立、多自由度机器人的动力学方程建立
机器人技术第二章(第一章绪论仅仅是复习自由度)
六自由度机器人(机械臂)运动学建模及运动规划系列——避障路径规划算法补充:遗传算法
六自由度机器人(机械臂)运动学建模及运动规划系列(六)——避障路径规划算法补充:蚁群算法
六自由度机器人(机械臂)运动学建模及运动规划系列(五)——避障路径规划
六自由度机器人(机械臂)运动学建模及运动规划系列(二)——运动学分析
【Matlab 六自由度机器人】关于旋转的参数化(欧拉角、姿态角、四元数)的相关问题(附MATLAB代码辅助理解)
【Matlab 六自由度机器人】关于改进型D-H参数(modified Denavit-Hartenberg)的详细建立步骤
浅析机器学习中的自由度
【机器人学】冗余七自由度机械臂的解析解逆解算法
今日推荐
周排行
vue + echart +map中国地图,省市地图,区县地图
spring boot2 (31)-cors跨域请求
『学习资料推荐』299元买的微信营销资料打包
个人学习卷积神经网络的疑惑解答
网络工程师-软考
模拟人生4 春夏秋冬、星梦起飞版更新下载方法以及常见问题
python关于对象的字符串显示str和repr以及
奇怪的session混乱问题
【3】分治法(divide-and-conquer)
Java项目开发成绩管理系统(九) 各模块实现信息修改
每日归档
更多
2024-08-07(0)
2024-08-06(0)
2024-08-05(0)
2024-08-04(0)
2024-08-03(0)
2024-08-02(0)
2024-08-01(0)
2024-07-31(0)
2024-07-30(0)
2024-07-29(0)