几十行代码简易实现CIFAR10数据集实战—ResNet50简易实现/pytorch
1 CIFAR-10
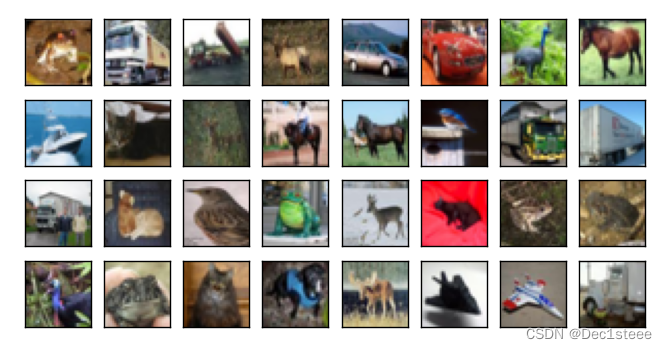
CIFAR-10是一个用于机器学习和计算机视觉算法训练的图像集合。它包含了60000张32x32的彩色图像,分为10个类别,每个类别有6000张图像。这10个类别分别是飞机、汽车、鸟、猫、鹿、狗、青蛙、马、船和卡车。CIFAR-10是2009年发布的ImageNet(1400万微小图像数据集)的一个标注子集,是机器学习研究中最广泛使用的数据集之一。
2 构建数据集
若数据集下载速度太慢可自行去官网下载即可官网
import torch, os
from torch import nn
from torch.utils.data import DataLoader as DataLoader
import torchvision
# 数据增强
transform = torchvision.transforms.Compose([
torchvision.transforms.RandomHorizontalFlip(),
torchvision.transforms.RandomResizedCrop(
(224, 224), scale=(0.9, 1), ratio=(0.9, 1.1)),
torchvision.transforms.ColorJitter(
brightness=0.2, contrast=0.2, saturation=0.2, hue=0.2),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize([0.485, 0.456, 0.406],
[0.229, 0.224, 0.225]),
])
test_transform = torchvision.transforms.Compose([
torchvision.transforms.Resize((224, 224)),
torchvision.transforms.ToTensor(),
torchvision.transforms.Normalize([0.485, 0.456, 0.406],
[0.229, 0.224, 0.225]),
])
def load_cifar10(is_train=True, transform=None, batch_size=128):
dataset = torchvision.datasets.CIFAR10(root="../Dataset", train=is_train,
transform=transform, download=True)
dataloader = DataLoader(dataset, batch_size=batch_size, shuffle=is_train)
return dataloader
train_iter = load_cifar10(True, transform, batch_size)
test_iter = load_cifar10(False, test_transform, batch_size)
3 设计ResNet50
简易设计,骨干网络resnet50特征提取,最后接个softmax
class ResNet(nn.Module):
def __init__(self, backend='resnet18'):
self.backend = backend # 卷积网络的后端
# 调用父类的初始化方法
super(ResNet, self).__init__()
self.feature_extractor = getattr(torchvision.models, backend)(pretrained=True
)
self.cnn = nn.Sequential(
self.feature_extractor.conv1,
self.feature_extractor.bn1,
self.feature_extractor.relu,
self.feature_extractor.maxpool,
self.feature_extractor.layer1,
self.feature_extractor.layer2,
self.feature_extractor.layer3,
self.feature_extractor.layer4,
nn.AdaptiveAvgPool2d((1, 1))
)
self.softmax = nn.Sequential(
nn.Flatten(),
nn.Linear(self.feature_extractor.fc.in_features, 10)
)
def forward(self, x):
features = self.cnn(x)
y = self.softmax(features)
return y
backend = 'resnet50'
net = ResNet(backend)
4 开始训练
from d2l import torch as d2l
from tqdm import tqdm
from torchsummary import summary
def train(net, train_iter, test_iter, num_epochs, lr, device):
print('training on', device)
net, resume_epoch = load_model(net, backend)
net.to(device)
optimizer = torch.optim.Adam(net.parameters(), lr=lr)
loss = nn.CrossEntropyLoss()
animator = d2l.Animator(xlabel='epoch', xlim=[resume_epoch+1, num_epochs+resume_epoch],ylim=[0, 1.0],
legend=['train loss', 'train acc', 'test acc'])
timer, num_batches = d2l.Timer(), len(train_iter)
for epoch in range(resume_epoch, num_epochs+resume_epoch):
print('epochs:',epoch+1)
metric = d2l.Accumulator(3)
net.train()
iterator = tqdm(train_iter)
for i, (X, y) in enumerate(iterator):
timer.start()
optimizer.zero_grad()
# print(X.shape)
X, y = X.to(device), y.to(device)
y_hat = net(X)
l = loss(y_hat, y)
l.backward()
optimizer.step()
with torch.no_grad():
metric.add(l * X.shape[0], d2l.accuracy(y_hat, y), X.shape[0])
timer.stop()
train_l = metric[0] / metric[2]
train_acc = metric[1] / metric[2]
if (i + 1) % (num_batches // 5) == 0 or i == num_batches - 1:
animator.add(epoch + (i + 1) / num_batches,
(train_l, train_acc, None))
status = f"epoch: {
epoch}, loss: {
train_l:.3f}, train_acc: {
train_acc:.3f}"
iterator.set_description(status)
test_acc = d2l.evaluate_accuracy_gpu(net, test_iter)
animator.add(epoch + 1, (None, None, test_acc))
print(f'loss {
train_l:.3f}, train acc {
train_acc:.3f}, '
f'test acc {
test_acc:.3f}')
print(f'loss {
train_l:.3f}, train acc {
train_acc:.3f}, '
f'test acc {
test_acc:.3f}')
print(f'{
metric[2] * num_epochs / timer.sum():.1f} examples/sec '
f'on {
str(device)}')
torch.save({
'model_state_dict': net.state_dict(),
'epoch': epoch+1},
os.path.join('model/', "cifar10_" + backend + ".params"))
d2l.plt.show()
def load_model(net, backend):
if os.path.exists('model/' + "cifar10_" + backend + ".params"):
info = torch.load('model/' + "cifar10_" + backend + ".params")
net.load_state_dict(info['model_state_dict'])
resume_epoch = info['epoch']
print("cifar10_" + backend + ": Load Successful.")
else:
print("File not found.")
resume_epoch = 0
return net, resume_epoch
```
```python
if __name__ == '__main__':
device = 'cuda:0' if torch.cuda.is_available() else 'cpu'
lr = 1e-3
batch_size = 128
# 用这个函数可以查看设计的网络结构
# summary(net, (1, 3, 224, 224), device='cuda')
net = load_model(net, backend)
train(net, train_iter, test_iter, 12, lr, device)
torch.save(net.state_dict(),
os.path.join('model/', "cifar10_" + backend + ".params"))
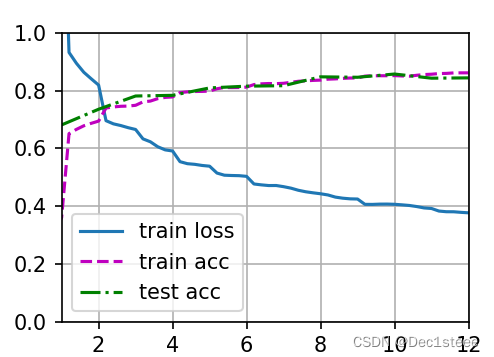
可视化训练过程:

5 结果