1.DQN
1.1DQN的三大特点
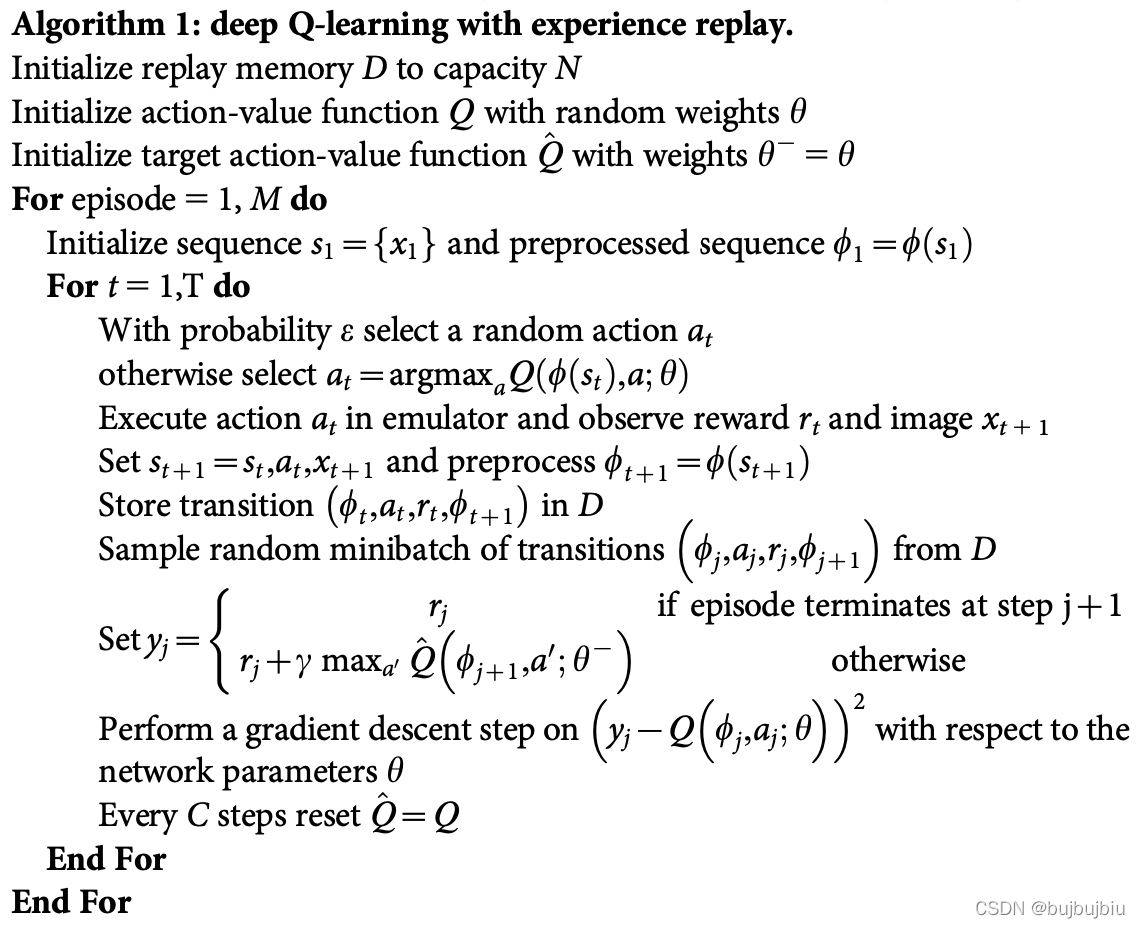
DQN由DeepMind在2013年发表的文章《Playing Atari with Deep Reinforcement Learning》提出,文章有两个创新点:经验回放和设立单独的目标网络。DQN的大体框架是Q-learning。如图为Q-learning的伪代码。
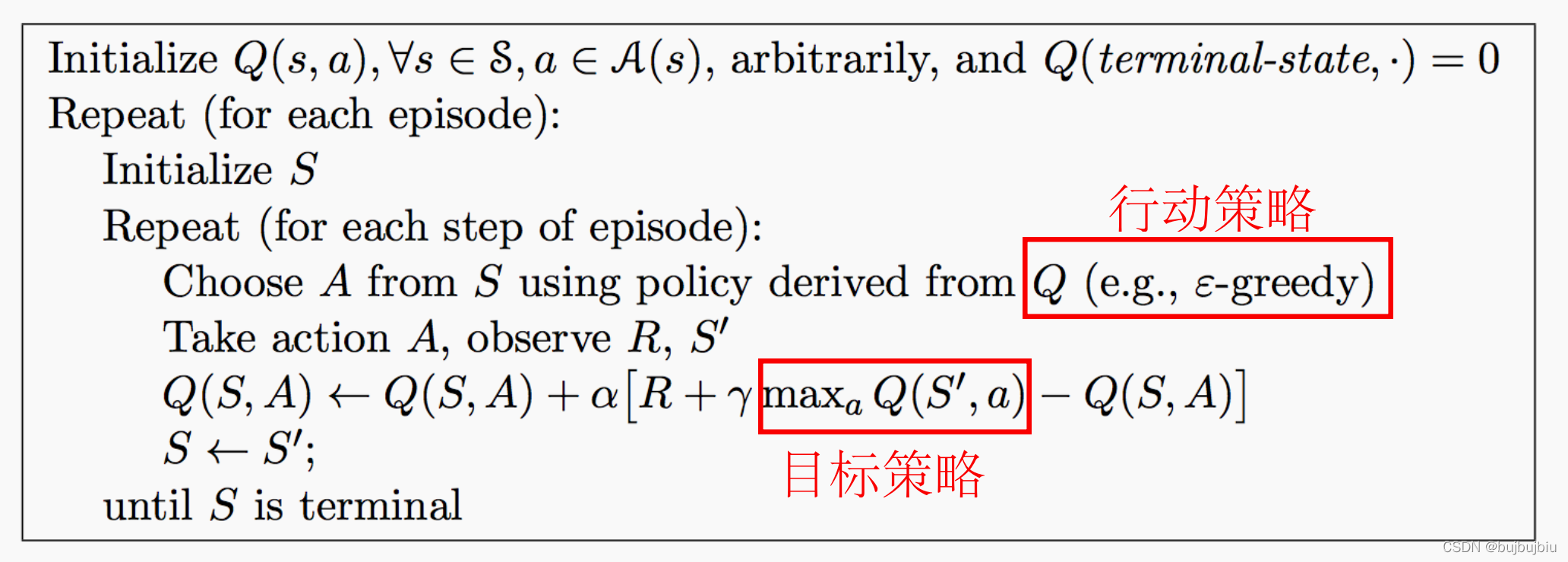
Q-learning有两个关键概念:异策略和时间差分
- 异策略:行动策略(产生数据的策略)和评估策略不是同一个策略。从上图伪代码中看出,行动策略使用的
策略,而评估改进的目标策略为
,即选择使行为值函数最大的动作。
- 时间差分:利用时间差分目标更新当前行为值函数。时间差分目标为
DQN对Q-learning修改体现在三个方面:
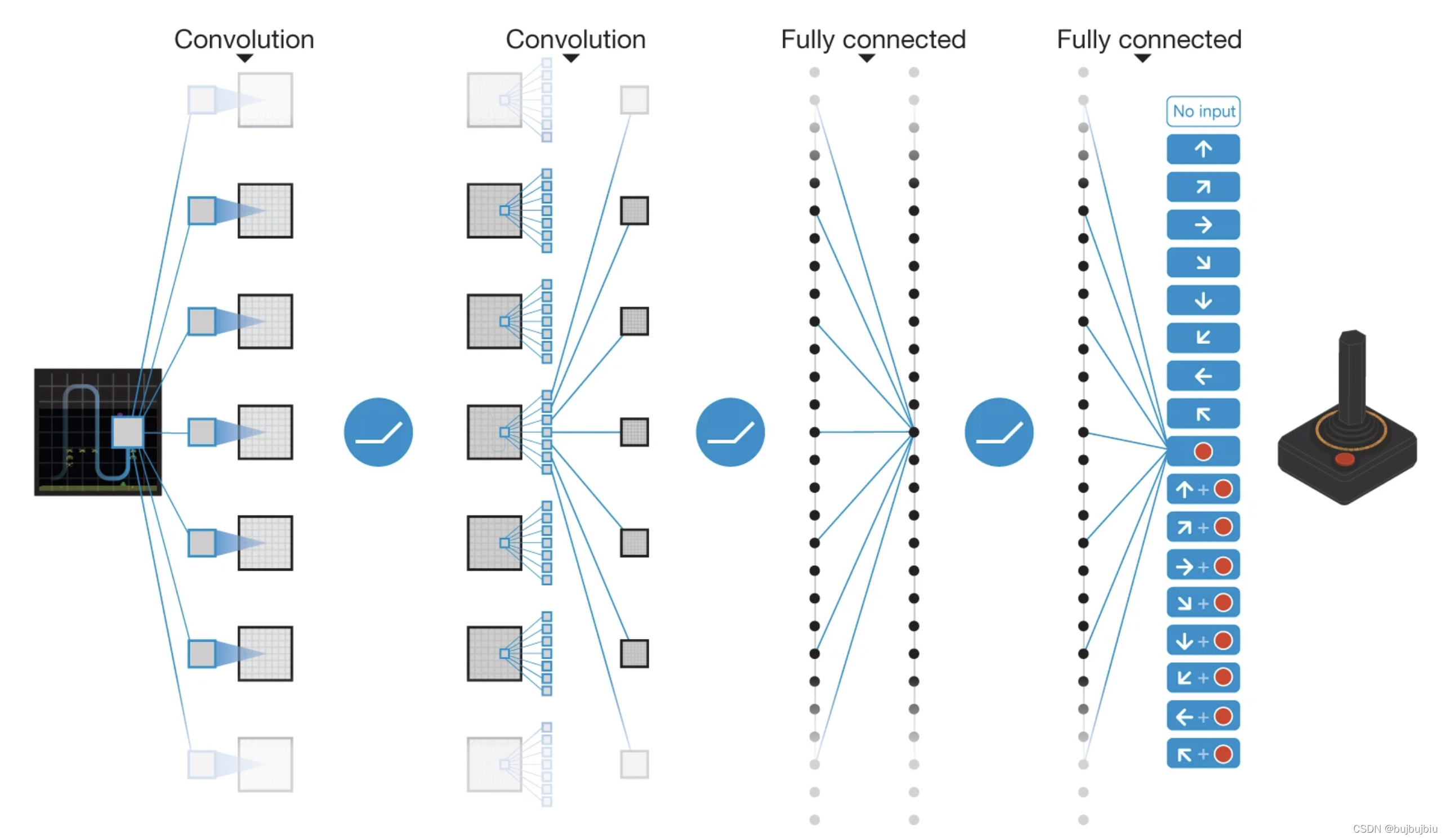
(1)DQN利用深度卷积神经网络逼近值函数(CNN)
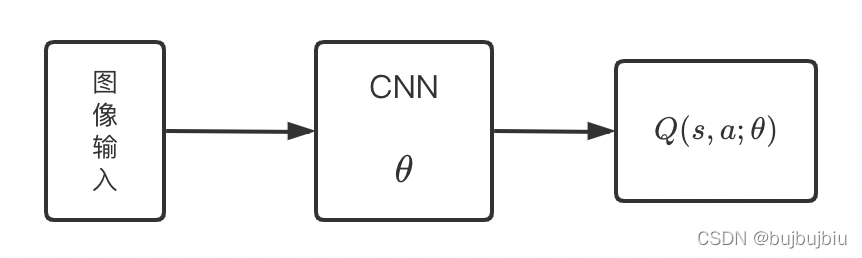
DQN行为值函数利用神经网络逼近,属于非线性参数逼近,此处的值函数对应着一组参数,在神经网络中参数就是每层网络的权重,用表示,行为值函数表示为
。更新值函数也就是更新参数
。当网络结构确定时,
就代表值函数。DQN网络使用三个卷积层加两个全连接层。输入84✖️84✖️4的图像,在论文中网络结构和超参数都是固定的。

但是使用神经网络逼近值函数常常出现不稳定不收敛的情况,为此构造了一种新的神经网络训练方法:经验回放
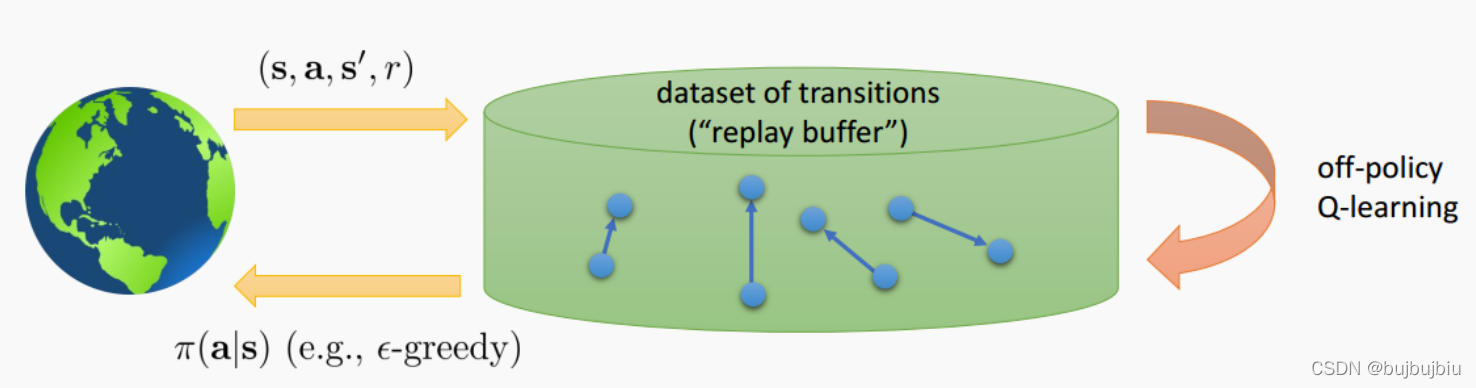
(2)DQN使用经验回放训练强化学习过程(Experience Replay)
经验回放能使神经网络的训练收敛且稳定,原因在于:训练神经网络时,提前假设为训练数据独立且同分布,但是通过强化学习采集到的数据存在关联性,利用这些数据进行顺序训练,神经网络自然会不稳定,而经验回放可以打破数据间的关联性。
在强化学习过程中,智能体将数据存储在一个数据库中,均匀随机采样的方式从数据库中抽取数据,然后利用抽取到的数据训练神经网络。经验池数据为,
...
其实经验回放在之前就被提出,2015年的论文又提出了目标网络的方法,进一步降低了数据之间的关联性。
(3)DQN设置了目标网络来单独处理时间差分算法中的TD偏差(Target Network)
利用神经网络对值函数进行逼近时,值函数的更新步更新的是参数,DQN使用CNN和梯度下降法,因此原伪代码中的Q值更新变成了一次监督学习式的参数更新。
为TD目标,计算
时用到的网络参数为
。
计算TD目标时所用的网络称为TD网络,在DQN之前,使用神经网络逼近值函数,计算TD目标的动作值函数所用的网络参数,和梯度计算中逼近的值函数所用的网络参数相同,容易导致数据间存在关联性。为此DeepMind团队提出计算TD目标的网络表示为
,计算动作值函数逼近的网络表示为
。用于动作值函数逼近的网络每一步都更新,用于TD目标网络的参数每固定步数更新一次。
 1.2DQN伪代码解读
1.2DQN伪代码解读
(1)初始化回放记忆D,设置可容纳的数据条数为N
(2)利用随机权重
初始化动作值函数
(3)令权重
来初始化TD目标的动作值函数
(4)循环每个episode,共M个episode
(5)初始化episode序列的第一个状态
,预处理得到状态对应的特征输入
(6)循环每个episode的每一步,共T步
(7)利用
概率选择一个随机动作
(8)如果
(9)在仿真器中执行
,观察回报
和图像(新状态)
(10)设置
,预处理
(11)将转换
储存在回放记忆D中
(12)从D中均匀随机采样获得一个转换样本数据
(13)判断是否是一个episode的终止状态,若是则TD目标
为
,否则利用TD目标网络
计算TD目标
(14)在网络参数
(15)更新动作值函数的网络参数
(16)每隔C步更新一次TD目标网络权值,
(17)结束一次episode内循环
(18)结束所有episode间循环
(7)(8)为行动策略即
(8)中选择最大动作时的动作值函数网络和TD目标网络参数相同,初始化阶段,训练后不同
(12)体现经验回放
(13)使用独立目标网络计算TD目标值
(15)(16)和
更新频次不同
2.Double DQN
《Deep Reinforcement Learning with Double Q-learning》
DQN无法克服Q-learning本身固有的缺点——过估计。过估计是指估计的值函数比真实的值函数大,Q-learning存在过估计的原因在于max操作,不管是表格型还是函数逼近,值函数更新公式都离不开max。
如果值函数每一点的值都过估计了相同的幅度,即过估计量是均匀的,由于最优策略是贪婪策略,即找到最大动作值函数的动作,这时最优策略是保持不变的。强化学习最终目标是找到最优策略而非值函数,也就是说,即便值函数被过估计了,对结果是不影响的。但是问题在于过估计量是不均匀的,这会导致得出的最优策略可能只是次优。
- 动作选择
Q-learning值函数更新公式如下,在求解TD目标时先要选择一个动作
,满足在状态
处
最大,这叫动作选择。

- 动作评估
选出后,利用
的动作值函数构造TD目标。
Q-learning使用同一个参数来选择和评估动作,Double Q-learning用不同的动作值函数来选择和评估动作。Double Q-learning的TD目标如下,

y=f(t) :一般的函数形式
y=max f(t) :y是f(t)函数的最大值
y=argmax f(t) :y是f(t)函数取到最大值时的参数t
从公式看出,动作选择的动作值函数如下,网络参数为,选出最大动作后再评估,这时的动作值函数网络参数为

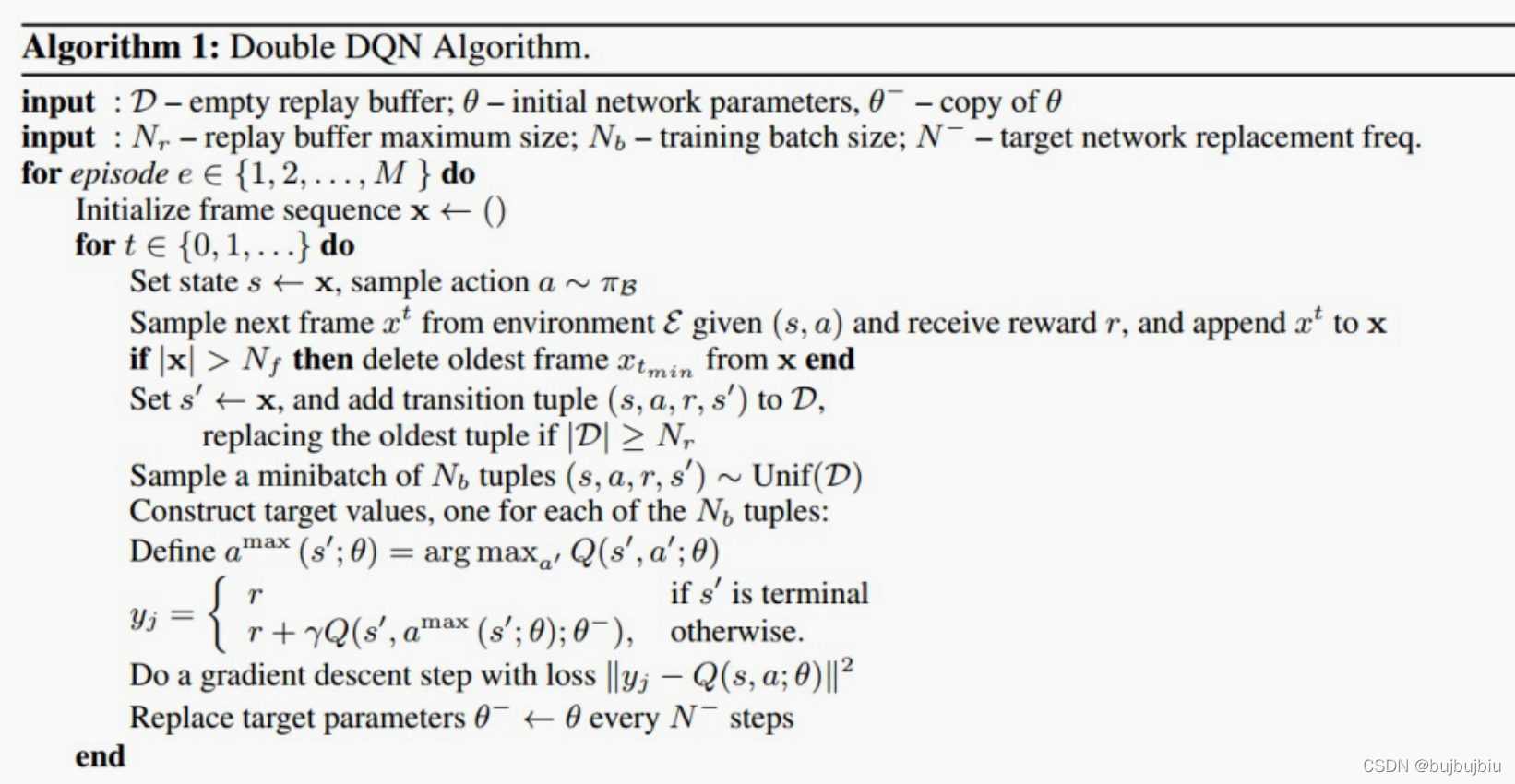
将Double Q-learning的思想融合到DQN中,就得到Double DQN,其TD目标为

与Double Q-learning相比,第二个网络由目标网络
代替,以此来评估当前贪婪策略,目标网络的更新同DQN一保持不变,即在线网络的周期性复制。
3.优先回放(Prioritized Reply)
《PRIORITIZED EXPERIENCE REPLAY》
DQN使用经验回放和独立目标网络,Double DQN改进了DQN中的max操作,但是经验回放还是采用均匀分布。但是智能体的经验(历史数据)对于智能体的学习并非相同的效率,在某些状态下,智能体的学习效率更高。优先回放的基本思想是打破均匀分布,赋予学习效率高的状态以更大的采样权重。
如何选择权重?理想标准是学习效率越高,权重越大。TD偏差越大,说明该状态处的值函数与TD目标的差距越大,智能体更新量越大,因此该处的学习效率越高。设样本处的TD偏差为
,则该样本处的采样概率为:
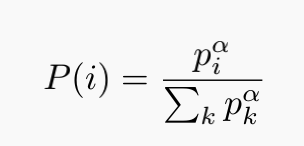
由TD偏差
决定,一般有两种方法:其中
根据
的绝对值排序得到
![]()
![]()
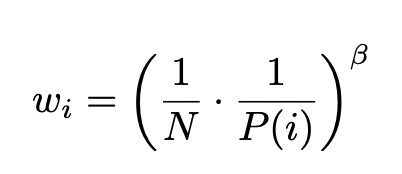
采用优先回放的概率分布采样,动作值函数的估计是一个有偏估计,因为采样分布和动作值函数分布是两个完全不同的分布,为了矫正这个偏差,需要乘一个重要性采样系数:
带有优先回放的DDQN伪代码如下:

(1)输入:minibatch大小为k,步长为
,回放周期K,存储数据大小N,常数
,
,总时间T
(2)初始化经验回放库
,
,
(3)观察初始状态
,选择动作
(4)时间t从1到T,进入循环
(5)观察
(6)将数据
存储在经验回放库中,令其优先级为
,采用该优先级初始化的目的是保证每个样本至少被利用一次
(7)每隔K步回放一次
(8)依次采集k个样本,循环一个minibatch
(9)根据概率分布采样一个样本点(需要对p的所有样本排序)
(10)计算该样本的重要性权重
(11)更新该样本点的TD偏差
(12)根据TD偏差更新该样本点的优先级
(13)累计权重改变量
(14) 结束本样本权重,采样下一个样本
(15)采样并处理完k个样本后更新权重值
(16)按步长更新目标网络的权重
(17)结束一次更新
(18)根据新策略选择下一个动作
(19)将新动作作用于环境,得到新数据,进入新循环
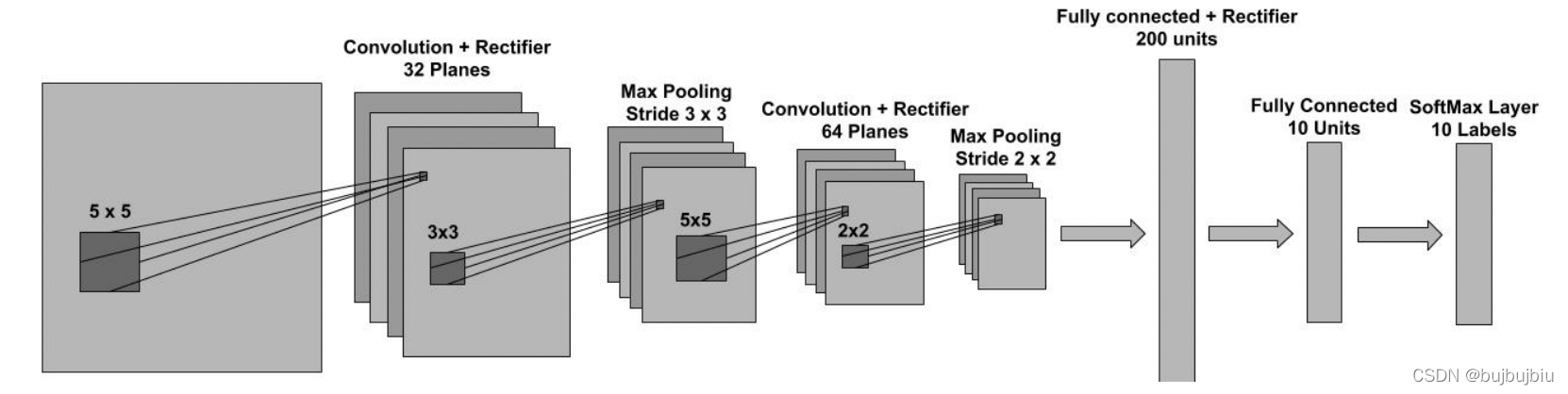
下图为文章中的神经网络结构设计
4.Dueling DQN
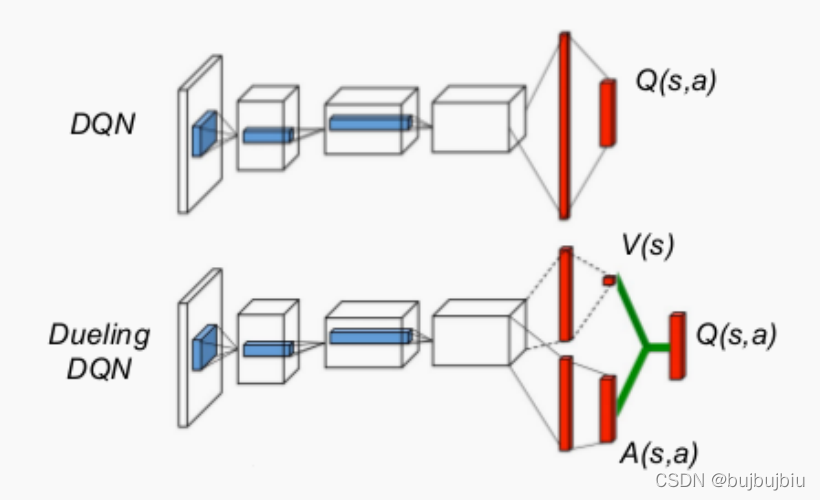
DQN,Double DQN,经验优先回放DQN,在值函数逼近时都是使用卷积神经网络,Dueling DQN从网络结构改变了DQN,动作值函数可以分解为状态值函数和优势函数,如图所示,原先卷积层后面直接跟着全连接层,输出Q值,而Dueling DQN中,使用两个全连接序列,单独估计状态值函数和优势函数,最后汇总输出单一Q值。结合两个完全连接层流输出Q估计的模块需要非常周到的设计。
优势函数是什么?公式中被称为优势函数。

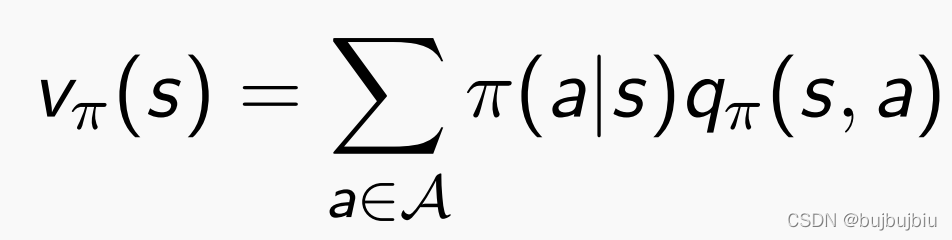
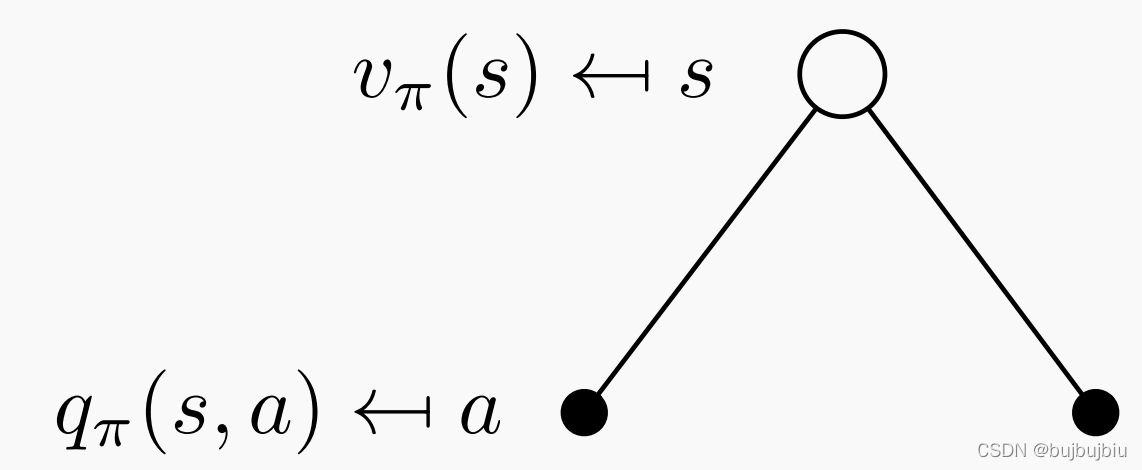
值函数是在状态s下所有可能动作的动作值函数乘采取该动作的概率和,即值函数
是该状态下所有动作值函数关于动作概率的平均值。
而动作值函数是单个动作对应的值 ,
能评价当前动作值函数相对于平均值的大小,因此此处的优势是动作值函数相比于当前状态的值函数的优势,如果优势函数大于0,说明该动作比平均动作好,反之说明当前动作不如平均动作好。
Dueling DQN网络输出组成:

为卷积层参数,
为状态值函数网络参数,
为优势函数网络参数。此处的优势函数做了中心化的处理,保证在某动作下会出现零优势。
Dueling DQN是在DQN基础上对神经网络结构部分进行修改,其余流程与DQN相似。
参考文献:
《Playing Atari with Deep Reinforcement Learning》
《Deep Reinforcement Learning with Double Q-learning》
《PRIORITIZED EXPERIENCE REPLAY》
《Dueling Network Architectures for Deep Reinforcement Learning》
以上文章均来自https://arxiv.org/abs