我们在这里简单讲解一下,在模型推理时合并BN和Conv层,能够简化网络架构,起到加速模型推理的作用。在模型中,BN层一般置于Conv层之后。
Conv:
卷积层的计算简单,公式为:
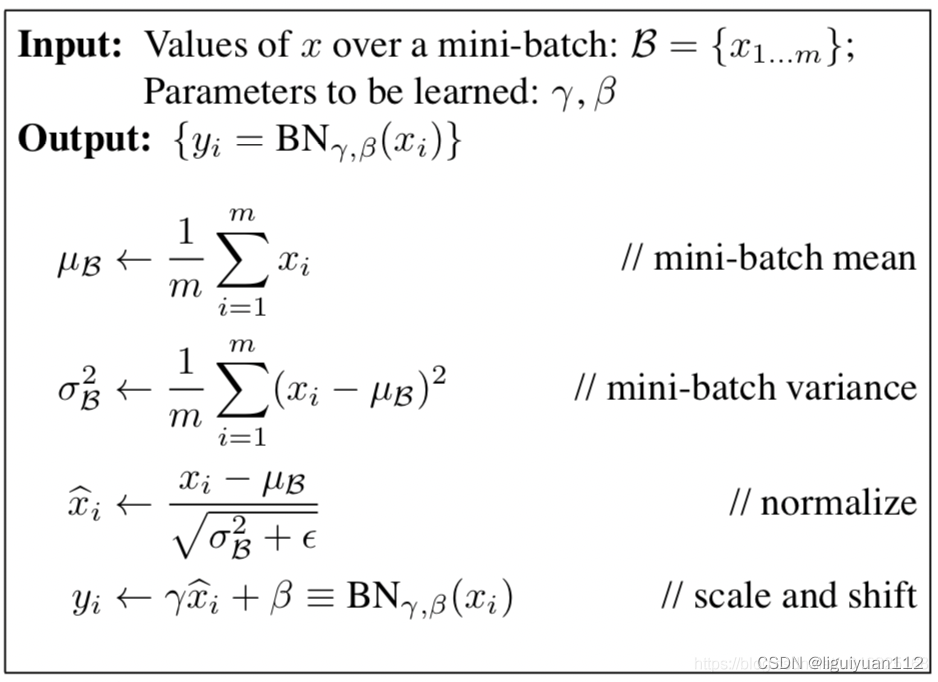
BN:
再来回忆一下BN操作的公式
合并conv和bn:
合并的过程可以用以下式子来表示:
合并的结果我们可以用一个卷积操作来表示。
权重:
偏置:
由BN层的最后两个公式可得:
由于Conv层的输出y,就是BN层的输入 ,然后代入得:
式子中:均值 ; 方差
; 较小的数
(防止分母为0); 缩放因子
; 偏置
;
因此,Conv和BN层合并后仅用一个卷积操作表示即可
其权值为:
偏置为:
代码:
def fuse_conv_and_bn(conv, bn):
#
# init
fusedconv = torch.nn.Conv2d(
conv.in_channels,
conv.out_channels,
kernel_size=conv.kernel_size,
stride=conv.stride,
padding=conv.padding,
bias=True
)
#
# prepare filters
w_conv = conv.weight.clone().view(conv.out_channels, -1)
w_bn = torch.diag(bn.weight.div(torch.sqrt(bn.eps+bn.running_var)))
fusedconv.weight.copy_( torch.mm(w_bn, w_conv).view(fusedconv.weight.size()) )
#
# prepare spatial bias
if conv.bias is not None:
b_conv = conv.bias
else:
b_conv = torch.zeros( conv.weight.size(0) )
b_bn = bn.bias - bn.weight.mul(bn.running_mean).div(torch.sqrt(bn.running_var + bn.eps))
fusedconv.bias.copy_( torch.matmul(w_bn, b_conv) + b_bn )
#
# we're done
return fusedconvimport torch
import torchvision
torch.set_grad_enabled(False)
x = torch.randn(16, 3, 256, 256)
rn18 = torchvision.models.resnet18(pretrained=True)
rn18.eval()
net = torch.nn.Sequential(
rn18.conv1,
rn18.bn1
)
y1 = net.forward(x)
fusedconv = fuse_conv_and_bn(net[0], net[1])
y2 = fusedconv.forward(x)
d = (y1 - y2).norm().div(y1.norm()).item()
print("error: %.8f" % d)参考: