/**
* @brief 区域生长算法,输入图像应为灰度图像
* @param srcImage 区域生长的源图像
* @param pt 区域生长点
* @param ch1Thres 通道的生长限制阈值,临近像素符合±chxThres范围内才能进行生长
* @param ch1LowerBind 通道的最小值阈值
* @param ch1UpperBind 通道的最大值阈值,在这个范围外即使临近像素符合±chxThres也不能生长
* @return 生成的区域图像(二值类型)
*/
Mat RegionGrow(Mat srcImage, Point pt, int ch1Thres,int ch1LowerBind=0,int ch1UpperBind=255)
{
Point pToGrowing; //待生长点位置
int pGrowValue = 0; //待生长点灰度值
Scalar pSrcValue = 0; //生长起点灰度值
Scalar pCurValue = 0; //当前生长点灰度值
Mat growImage = Mat::zeros(srcImage.size(), CV_8UC1); //创建一个空白区域,填充为黑色
//生长方向顺序数据
int DIR[8][2] = {
{
-1,-1}, {
0,-1}, {
1,-1}, {
1,0}, {
1,1}, {
0,1}, {
-1,1}, {
-1,0}};
vector<Point> growPtVector; //生长点栈
growPtVector.push_back(pt); //将生长点压入栈中
growImage.at<uchar>(pt.y, pt.x) = 1.0; //标记生长点
pSrcValue = srcImage.at<uchar>(pt.y, pt.x); //记录生长点的灰度值
while (!growPtVector.empty()) //生长栈不为空则生长
{
pt = growPtVector.back(); //取出一个生长点
growPtVector.pop_back();
//分别对八个方向上的点进行生长
for (int i = 0; i<9; ++i)
{
pToGrowing.x = pt.x + DIR[i][0];
pToGrowing.y = pt.y + DIR[i][1];
//检查是否是边缘点
if (pToGrowing.x < 0 || pToGrowing.y < 0 ||
pToGrowing.x > (srcImage.cols-1) || (pToGrowing.y > srcImage.rows -1))
continue;
pGrowValue = growImage.at<uchar>(pToGrowing.y, pToGrowing.x); //当前待生长点的灰度值
pSrcValue = srcImage.at<uchar>(pt.y, pt.x);
if (pGrowValue == 0) //如果标记点还没有被生长
{
pCurValue = srcImage.at<uchar>(pToGrowing.y, pToGrowing.x);
if(pCurValue[0] <= ch1UpperBind && pCurValue[0] >= ch1LowerBind )
{
if (abs(pSrcValue[0] - pCurValue[0]) < ch1Thres ) //在阈值范围内则生长
{
growImage.at<uchar>(pToGrowing.y, pToGrowing.x) = 1.0; //标记为白色
growPtVector.push_back(pToGrowing); //将下一个生长点压入栈中
}
}
}
}
}
return growImage.clone();
}
int main()
{
// 读入图像
const string img_path = "/mnt/d/projects/picking_point_cpp/depth.png";
Mat img = imread(img_path, 0);
Mat img_gray;
//用于显示的两个深拷贝
Mat out_img;
cv::cvtColor(img, out_img, COLOR_GRAY2BGR);
if (img.empty())
{
cout << "img not exists!";
return -1;
}
cv::Mat img_area_grow=Mat::zeros(img.size(), CV_64FC1); //区域生长结果
// cv::cornerHarris(img_gray, harris, 10, 5, 0.24);
std::stack<cv::Point2f> seeds;
Point2f seed;
/*add seeding*/
seed.x = float(160);
seed.y = float(400);
seeds.push(seed);
int thres = 4; //区域生长条件
cv::Point seedPoint(160, 400);
// AreaGrow(img, img_area_grow,flag, seeds,thres);
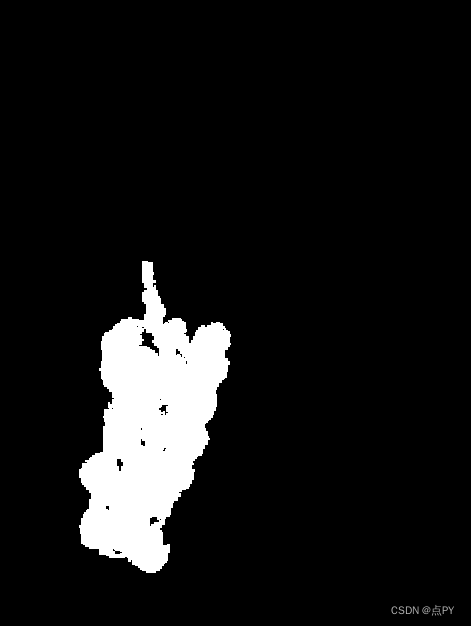
img_area_grow = RegionGrow(img, seedPoint, thres);
cv::imshow("img_area_grow", img_area_grow*255); //区域生长结果
waitKey(0);
std::vector<float> colSumList;
for (int i = 0; i < img_area_grow.cols; i++)
{
float colSum = 0.0;
colSumList.push_back(colSum);
}
for (int j = 0; j < img_area_grow.rows; j++)
{
uchar* ucPxielCol = img_area_grow.data + j * img_area_grow.step;
for (int i = 0; i < img_area_grow.cols; i++)
{
colSumList[i] += ucPxielCol[i];
}
}
int maxIndexCol = std::distance(colSumList.begin(), std::max_element(colSumList.begin(), colSumList.end()));
std::cout << "rows :" << img_area_grow.rows << " cols: " << img_area_grow.cols << endl;
std::cout << "Maximum col value in the vector is at index " << maxIndexCol << std::endl;
std::vector<float> rowSumList;
for (int j = 0; j < img_area_grow.rows; j++)
{
float rowSum = 0.0;
uchar* ucPixelrow = img_area_grow.data + j * img_area_grow.step;
for (int i = 0; i < img_area_grow.cols; i++)
{
rowSum += ucPixelrow[i];
}
rowSumList.push_back(rowSum);
// std::cout << "row index: " << j << ", value :" << rowSum << endl;
rowSum = 0;
}
int maxIndexRow = std::distance(rowSumList.begin(), std::max_element(rowSumList.begin(), rowSumList.end()));
std::cout << "Maximum row value in the vector is at index " << maxIndexRow << std::endl;
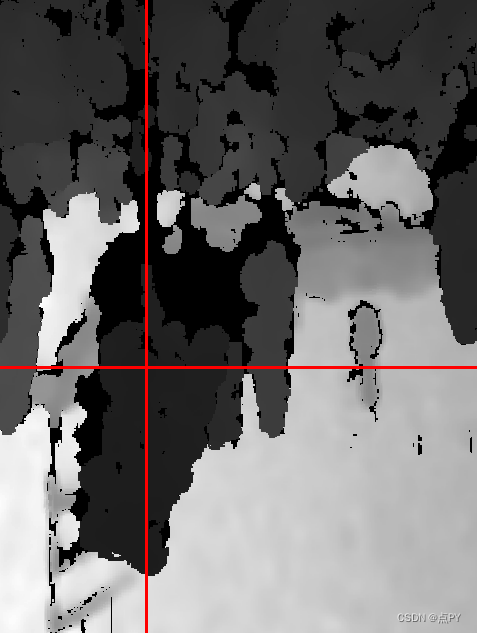
cv::line(out_img, Point(maxIndexCol, 0), Point(maxIndexCol, img_area_grow.rows), Scalar(0, 0, 255), 2);
cv::line(out_img, Point(0, maxIndexRow), Point(img_area_grow.cols, maxIndexRow), Scalar(0, 0, 255), 2);
cv::imshow("Line", out_img); //区域生长结果
waitKey(0);
}