操作系统实验四:磁盘调度(仿真各种磁盘调度算法)
资源下载:https://download.csdn.net/download/fufuyfu/85511492?spm=1001.2014.3001.5503
一、实验内容
了解磁盘调度的基本算法及性能
二、实验要求
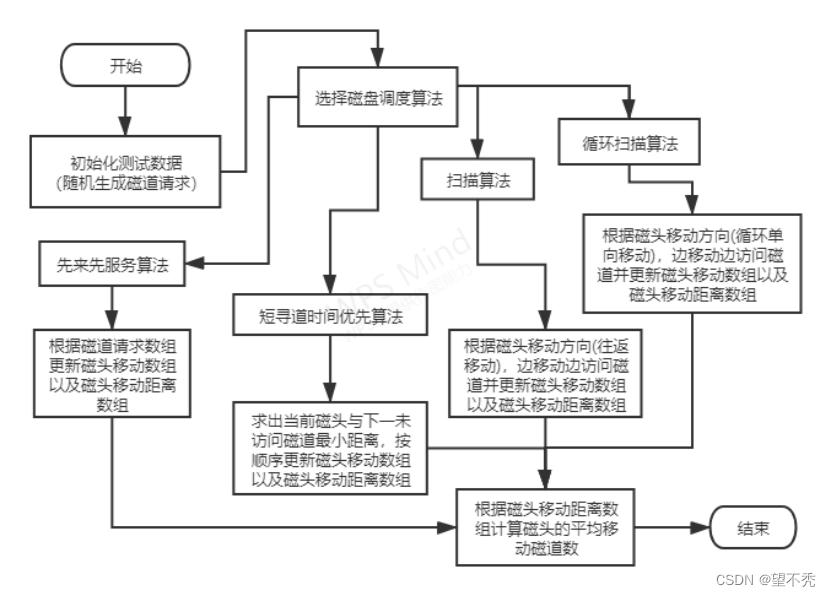
由系统产生一系列磁盘请求(10个),分别给出先来先服务算法、最短寻道时间优先算法、扫描(SCAN)算法和循环扫描(CSCAN)算法时磁头移动顺序并计算磁头的平均移动磁道数。( 假设磁头刚从80磁道移到100磁道)
三、算法流程
3.1 头文件和数据结构
#include <stdio.h>
#include <stdlib.h>
#define START 100
// 磁盘范围 [0,end]
int end;
// 存储随机生成10个磁道请求
int request[15];
// 存储各算法的磁头移动顺序
int order[15];
// 标记 -- 被访问过:1,未被访问:0,此时全为0
int sign[15];
// 磁道距离
int dis[15];
3.2 函数声明
// 函数声明
// 菜单
void menu();
// 随机生成10个磁道请求
void create();
// 先来先服务算法
void FCFS();
// 最短寻道时间优先算法
void SSTF();
// 扫描算法
void SCAN();
// 循环扫描算法
void CSCAN();
// 确定磁头移动的方向
int direction();
// 展示算法寻道顺序和平均移动磁道数
void show();
3.3 主函数
int main(){
printf("\n ---------------------当前磁头所在磁道:%d---------------------\n",START);
// 随机生成10个磁道请求
create();
// 菜单
menu();
}
3.4 随机生成10个磁道请求
// 随机生成10个磁道请求
void create(){
// 产生磁盘寻道范围
printf("\n\t磁盘寻道范围从0开始,最大不超过200");
printf("\n\t由于当前磁头位于100,磁盘寻道范围应大于或等于100");
printf("\n\t请输入符号条件的磁盘寻道范围:");
// int end;
scanf("%d",&end);
while(end < 100 || end > 200){
printf("\n\t你输入的磁盘寻道范围不符合条件");
printf("\n\t请重新输入符号条件的磁盘寻道范围:");
scanf("%d",&end);
}
printf("\n\t磁盘寻道范围确定成功!\n");
// 随机生成10个磁道请求
for(int i = 1;i <= 10;++i){
request[i] = rand()%(end+1);
// 排除生成重复的磁道请求
for(int j = i-1;j >= 1;--j){
if(request[i] == request[j]){
--i;
break;
}
}
}
printf("\n\t已随机产生10个磁道请求!\n\n");
printf("\t磁道请求:");
for(int i = 1;i <= 10;++i){
printf("%d ",request[i]);
}
printf("\n\n----------------------------------------------------------------\n");
}
3.5 菜单
// 菜单
void menu(){
while(true){
printf("\n\t请选择使用哪种磁盘调度算法:\n\n");
printf("\t\t1.先来先服务算法(FCFS)\n");
printf("\t\t2.短寻道时间优先算法(SSTF)\n");
printf("\t\t3.扫描算法(SCAN)\n");
printf("\t\t4.循环扫描算法(CSCAN)\n");
printf("\t\t5.退出\n\n");
printf("\t请输入有效操作编号:");
int option;
scanf("%d",&option);
printf("\n");
// 根据输入操作编号进行相应操作
switch(option){
case 1:
// 先来先服务算法
FCFS();
show();
break;
case 2:
// 最短寻道时间优先算法
SSTF();
show();
break;
case 3:
// 扫描算法
SCAN();
show();
break;
case 4:
// 循环扫描算法
CSCAN();
show();
break;
case 5:
printf("---------------------------退出成功!---------------------------\n");
return;
break;
default:
printf("-------------输入操作编号错误,请输入有效操作编号!-------------\n");
break;
}
}
}
3.6 先来先服务算法
// 先来先服务算法
void FCFS(){
// 磁道的请求顺序就是磁头的移动顺序
for(int i = 1;i <= 10;++i){
order[i] = request[i];
if(i == 1){
dis[i] = abs(START - request[i]);
}else{
dis[i] = abs(request[i-1] - request[i]);
}
}
}
3.7 最短寻道时间优先算法
// 最短寻道时间优先算法
void SSTF(){
// 定位当前磁道所属下标
int nowIndex = 0;
// 定位下一磁道所属下标
int nextIndex = 1;
// 存储最短距离
int s;
// 找出当前磁头所在磁道距离下一磁道的最短距离对应的磁道
for(int i = 1;i <= 10;++i){
s = 200;
if(i == 1){
for(int j = 1;j <= 10;++j){
// 开始的磁头到该磁道的距离小于最小距离时
if(abs(START - request[j]) < s){
s = abs(START - request[j]);
nextIndex = j;
}
}
}else{
for(int j = 1;j <= 10;++j){
// 当该磁道未被访问且当前磁头到该磁道的距离小于最小距离时
if(sign[j] == 0 && abs(request[nowIndex]-request[j]) < s){
s = abs(request[nowIndex] - request[j]);
nextIndex = j;
}
}
}
// 更新磁道访问顺序数组
order[i] = request[nextIndex];
// 更新距离数组
dis[i] = s;
// 将该磁道设置为已访问
sign[nextIndex] = 1;
// 移动磁头
nowIndex = nextIndex;
}
}
3.8 扫描算法
// 扫描算法
void SCAN(){
// 磁头在磁盘来回移动,先从START开始从外向内
// 磁头开始的磁道
int start;
// 确定更改顺序数组的位置
int index = 1;
// 磁头移动方向从外向内,开始时为80到100
// 磁道内大外小,最外为磁道0
for(start = START;start <= end;++start){
// 遍历请求数组
// 每次比较请求数组的所有磁道
// 如果相等则将其加入order数组并更改标记
for(int i = 1;i <= 10 && index <= 10;i++){
if(request[i] == start && sign[i] == 0){
order[index] = request[i];
sign[i] = 1;
// 更新距离数组
if(index == 1){
dis[index] = abs(START - order[index]);
}else{
dis[index] = abs(order[index-1] - order[index]);
}
if(start != end){
index++;
}
}
}
}
bool change = true;
// 磁头移动方向变为从内向外
for(start = end;start >= 0;--start){
// 遍历请求数组
// 每次比较请求数组的所有磁道
// 如果相等则将其加入order数组并更改标记
for(int i = 1;i <= 10 && index <= 10;i++){
if(request[i] == start && sign[i] == 0){
order[index] = request[i];
sign[i] = 1;
// 更新距离数组
if(change){
dis[index] = 2*end - order[index-1] - order[index];
change = false;
}else{
dis[index] = abs(order[index-1] - order[index]);
}
index++;
}
}
}
}
3.9 循环扫描算法
// 循环扫描算法
void CSCAN(){
// 磁头在磁盘来回移动,先从START开始从外向内
// 磁头开始的磁道
int start;
// 确定更改顺序数组的位置
int index = 1;
// 磁头移动方向从外向内,开始时为80到100
// 磁道内大外小,最外为磁道0
for(start = START;start <= end;++start){
// 遍历请求数组
// 每次比较请求数组的所有磁道
// 如果相等则将其加入order数组并更改标记
for(int i = 1;i <= 10 && index <= 10;i++){
if(request[i] == start && sign[i] == 0){
order[index] = request[i];
sign[i] = 1;
// 更新距离数组
if(index == 1){
dis[index] = abs(START - order[index]);
}else{
dis[index] = abs(order[index-1] - order[index]);
}
if(start != end){
index++;
}
}
}
}
bool change = true;
// 磁头移动方向仍然从外向内,从0磁道重新开始扫描
for(start = 0;start <= START - 1;++start){
// 遍历请求数组
// 每次比较请求数组的所有磁道
// 如果相等则将其加入order数组并更改标记
for(int i = 1;i <= 10 && index <= 10;i++){
if(request[i] == start && sign[i] == 0){
order[index] = request[i];
sign[i] = 1;
// 更新距离数组
if(change){
dis[index] = order[index];
change = false;
}else{
dis[index] = abs(order[index-1] - order[index]);
}
index++;
}
}
}
}
3.10 展示算法寻道顺序和平均移动磁道数
// 展示算法寻道顺序和平均移动磁道数
void show(){
// 总移动磁道数
int sum_dis = 0;
printf("\t开始的磁道:%d\n",START);
printf("\t 被访问的下一磁道\t磁头需移动距离\n");
for(int i = 1;i <= 10;++i){
printf("\t\t%4d\t\t",order[i]);
printf("%8d\n",dis[i]);
sum_dis += dis[i];
}
printf("\n\t该磁盘调度算法下磁头的平均移动磁道数:%0.2f\n\n",(float)sum_dis/10);
printf("----------------------------------------------------------------\n");
// 将标记数组全部置0
for(int i = 1;i <= 10;++i){
sign[i] = 0;
}
}
四、实验结果
代码注释已详尽,自行运行截图
五、分析
通过以上四种磁盘调度算法对同一组随机生成的10个磁道访问请求进行处理的顺序以及各算法下磁头的平均移动磁道数比较,可知四种算法各有优缺点。
5.1 先来先服务算法(FCFS)
该算法是一种比较简单的磁盘调度算法。它根据进程请求访问磁盘的先后次序进行调度。此算法的优点是公平、简单,且每个进程的请求都能依次得到处理,不会出现某一进程的请求长期得不到满足的情况。但由于由于此算法未对寻道进行优化,在对磁盘的访问请求比较多的情况下,致使平均寻道时间可能较长。在本次实验中,该算法下磁头的平均移动磁道数为47.70,远远大于其他三种算法。但与此同时各进程得到服务的响应时间的变化幅度较小。
5.2 最短寻道时间优先算法(SSTF)
该算法根据要求访问的磁道与当前磁头所在的磁道距离远近响应磁道访问请求,以使每次的寻道时间最短,该算法可以得到比较好的吞吐量,但却不能保证平均寻道时间最短,在本次实验中,该算法下磁头的平均移动磁道数为23.90,远远少于FCFS,但仍大于更优的SCAN和CSCAN。该算法的明显缺点是对用户的服务请求的响应机会不是均等的,因而导致响应时间的变化幅度很大。在服务请求很多的情况下,对内外边缘磁道的请求将会无限期的被延迟,有些请求的响应时间将不可预期。
5.3 扫描算法(SCAN)
扫描算法不仅考虑到欲访问的磁道与当前磁道的距离,更优先考虑的是磁头的当前移动方向。此算法基本上克服了最短寻道时间优先算法的服务集中于中间磁道和响应时间变化比较大的缺点,而具有最短寻道时间优先算法的优点即吞吐量较大,平均响应时间较小。在本次实验中,该算法下磁头的平均移动磁道数为19.8,看见确有优化。但由于是摆动式的扫描方法,两侧磁道被访问的频率仍低于中间磁道。
5.4 循环扫描算法(CSCAN)
循环扫描算法是对扫描算法的改进。如果对磁道的访问请求是均匀分布的,当磁头到达磁盘的一端,并反向运动时落在磁头之后的访问请求相对较少。这是由于这些磁道刚被处理,而磁盘另一端的请求密度相当高,且这些访问请求等待的时间较长,为了解决这种情况,循环扫描算法规定磁头单向移动,构成循环扫描。大大提高了响应效率,在本次实验中,该算法下磁头的平均移动磁道数为12.70,为四种算法中的最小值,可见该算法的有效性。