首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
200SMART 步进运动 轴设置
企业开发
2023-06-19 06:30:55
阅读次数: 0
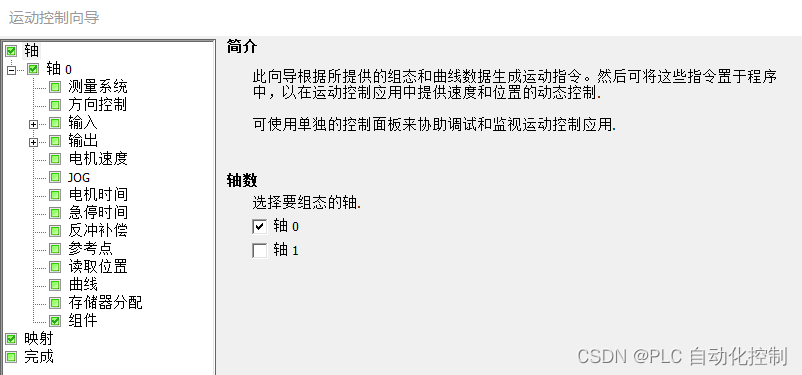
200SMART 步进运动 轴设置
工具 运动 选择轴0
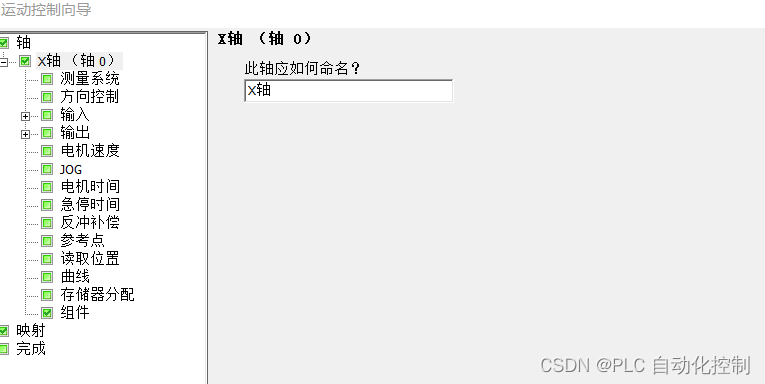
可以明名为X轴
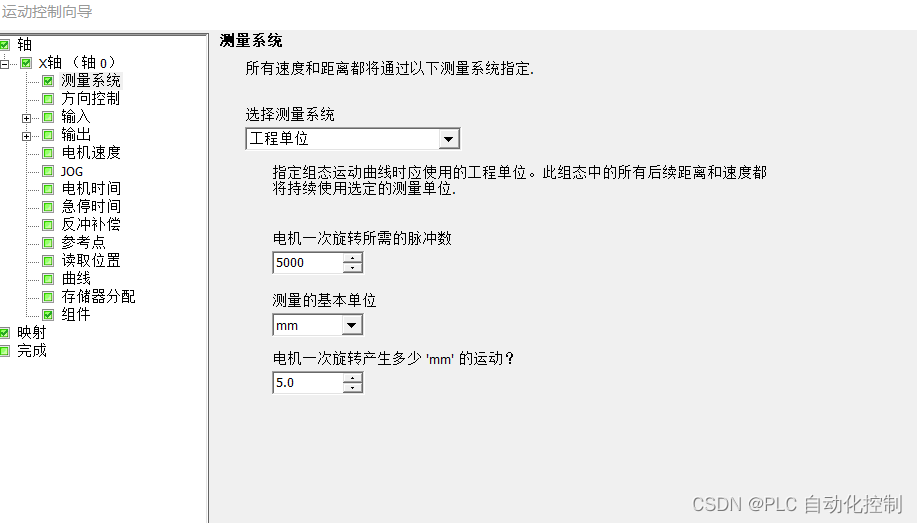
电机一次旋转所需脉冲数 测量基本单位等数据 根据实际填写
默认 2输出 脉冲和方向
猜你喜欢
转载自
blog.csdn.net/m0_73687141/article/details/127761688
200SMART 步进运动 轴设置
200SMART指令中的FOR循环指令
西门子200SMART(三)
1200与200SMART TCP 通信
西门子200SMART编程软件安装方法
s7-200 smart 运动控制
大白话讲解 - 200SMART中的定时器指令
200SMART编程软件中的变量表是干什么用的啊?
运动控制:步进电机
支持西门子200smart,1200和1500的profinet远程分布式I/O的无限扩展简介
ABB机器人与西门子PLC(200smart/1200)Profinet通信实操案例
使用S7-200SMART定时器直接控制四相八拍步进电机
步进电机多轴联动算法
使用西门子200SMART PLC来控制音乐喷泉,我把控制程序解释给你听
TMC2041 双轴步进电机驱动芯片
单轴步进驱动模块SH-20403
拆解多轴步进电机控制器
拆解多轴步进电机控制器
拆解多轴步进电机控制器
java android 读写西门子PLC数据,包含S7协议和Fetch/Write协议,s7支持200smart,300PLC,1200PLC,1500PLC
基于smart200的运动控制向导组态,给出具体模块的使用说明,填补网上关于这一块的空白。
重复调用轴运动函数
PID应用多轴运动控制
Matplotlib设置轴属性
ECharts设置y轴显示
echarts 双y轴设置
echars坐标轴设置
Matplotlib x轴设置间隔
三轴全向机器人运动学分析
六轴机械臂运动学正逆解
今日推荐
周排行
AIZU 2224 Save your cats(并查集)
HTTP响应头状态码详解
Python socket编程(2)
MaxCompute Studio使用心得系列7—作业对比
Supervisor安装使用
LeetCode 164. Maximum Gap
mysql面试题: 一张表里面有ID自增主键,当insert了17条记录之后,删除了第15,16,17条记录,再把mysql重启,再insert一条记录,这条记录的ID是18还是15
nutch1.2 DeleteDuplicates IndexMerger 详解
OC - @property与setter,getter方法
SpringBoot @Transactional的rollbackFor属性
每日归档
更多
2024-09-19(0)
2024-09-18(0)
2024-09-17(0)
2024-09-16(0)
2024-09-15(0)
2024-09-14(0)
2024-09-13(0)
2024-09-12(0)
2024-09-11(0)
2024-09-10(0)