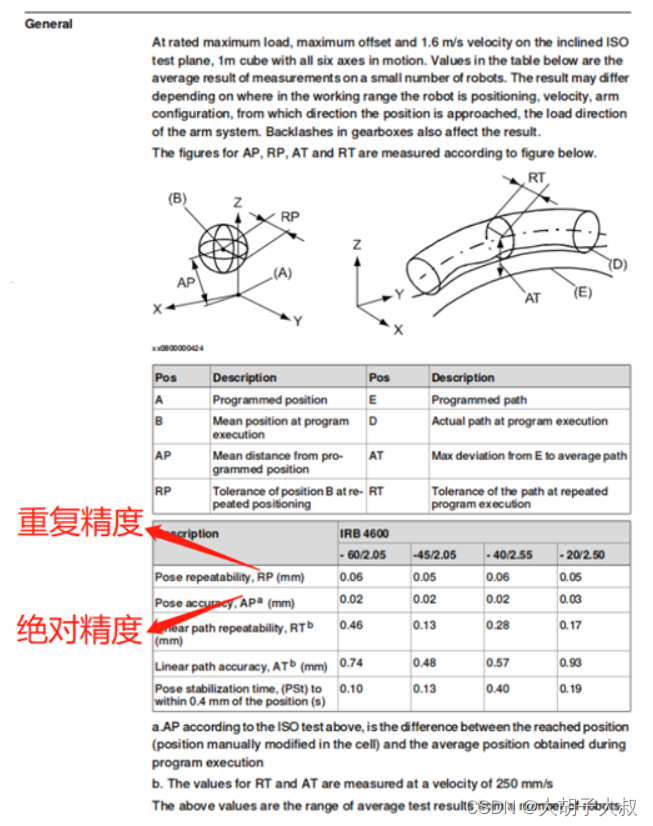
ABB系列某款机器人精度参数表
机械臂是工业生产中的重要设备,在焊接码垛 以及 非 接触测量等 领域中有 着重要应 用。然而由于机械臂本体制造中存在机械制造公差装配误差导致的运动学参数误差以及电机转角与关节转角间减速比误差等,导致机械臂存在重复性定位精度较高(0.05 mm 以内)而绝对定位精度较低(1~2mm)的情况。因此需要对机械臂进行标定,提高机械臂的绝对定位精度。
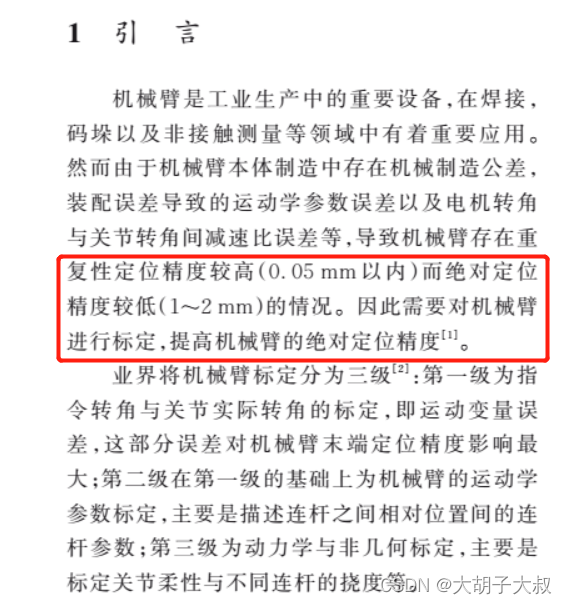
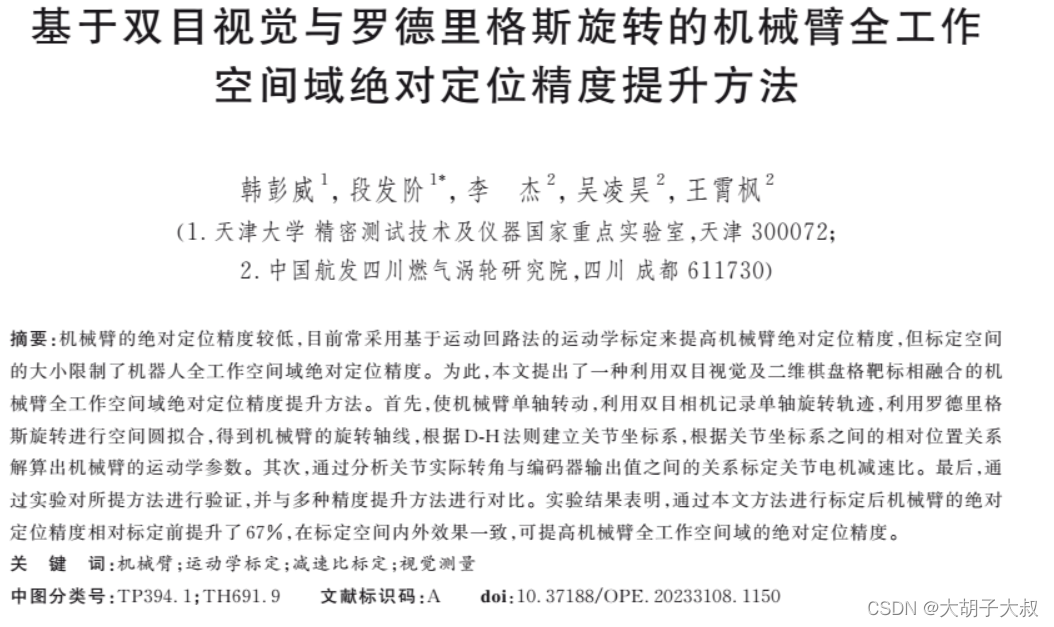
引言出自下面图中的论文中
那么我们定位中用的是机器人的什么精度呢?一般我们做一个模板,然后对该位置进行计算,示教机器人动作,对其他位置进行计算时,机器人的拍照姿势仍然是模板位置的拍照姿势,那么我们用到的就是机器人的重复精度。
但是