(二)超前角弱磁控制以及simulink实现(基于矢量控制FOC)
一定要先看原理,再看仿真框图
PMSM 在稳态运行时,考虑电机结构和驱动电路开关器件等因素,电机端电压 us 和定子电流is 都受到一定限制,不能超过极限值 ulim 和 ilim。
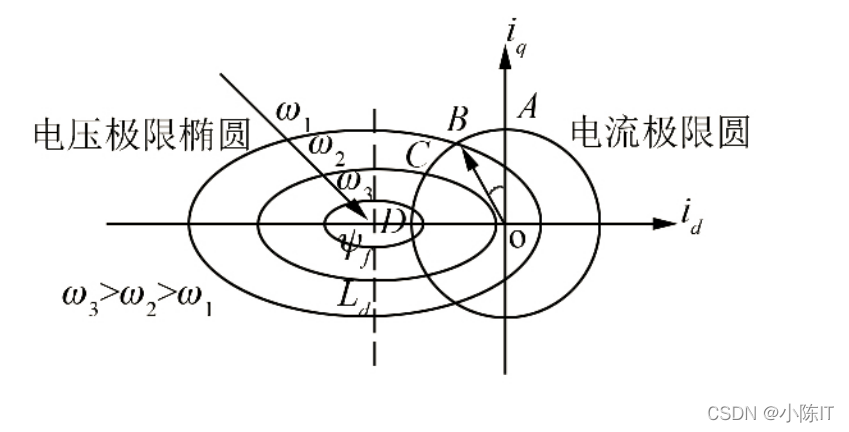
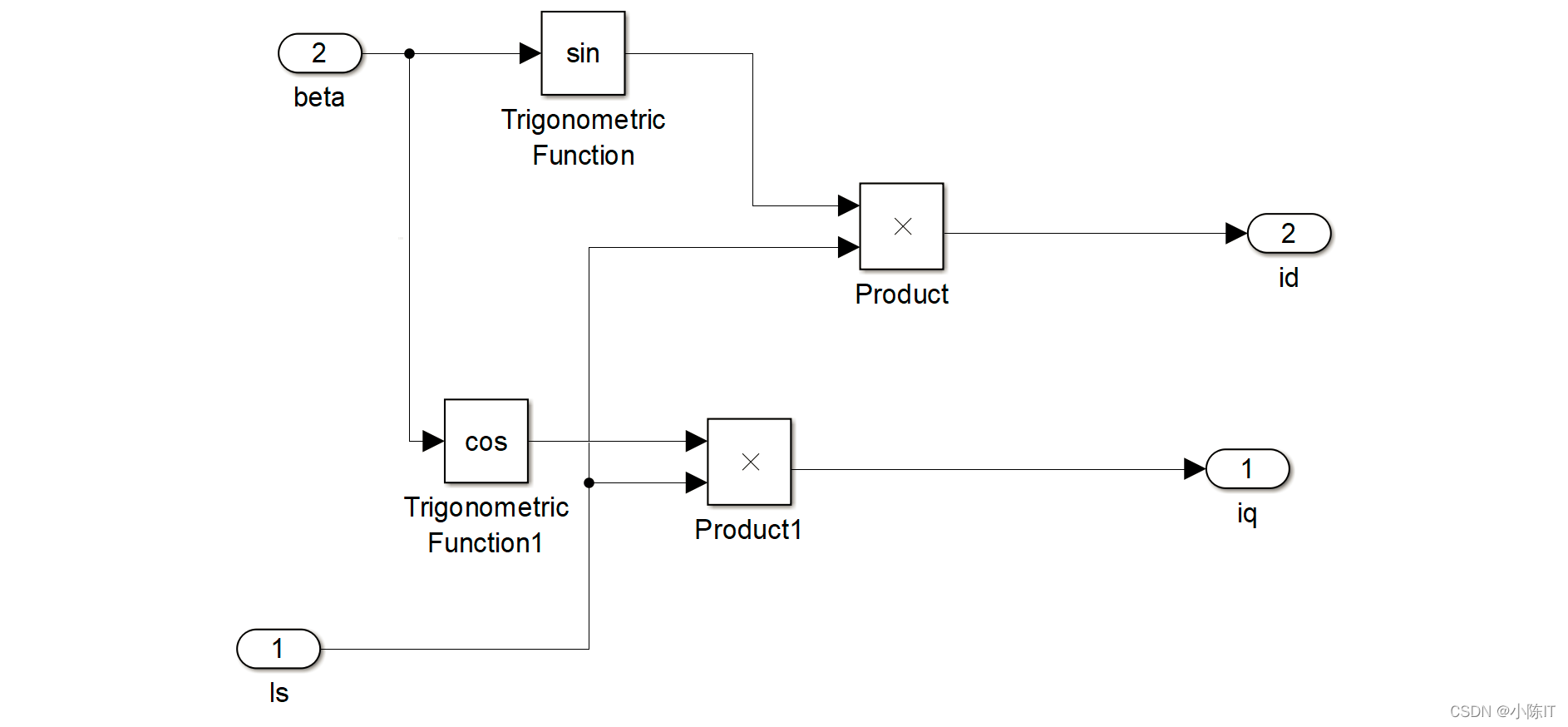
对于 PMSM 而言,出厂后励磁磁动势便无法改变;当电机端电压达到极限后如果要继续升高转速则只能靠调节 id 来实现,即增加定子直轴去磁电流分量来维持高速运行时的电压平衡,实现弱磁扩速。设电流矢量的模为 is,矢量与 q 轴夹角为 β,在基速以下运行时 β = 0,当需要弱磁升速时,增加 β 即增大了 d 轴去磁电流,达到弱磁升速的目的。该方法称为超前角弱磁控制。
 电压极限圆和电流极限圆:
电压极限圆和电流极限圆:
 电压极限圆方程:
电压极限圆方程:
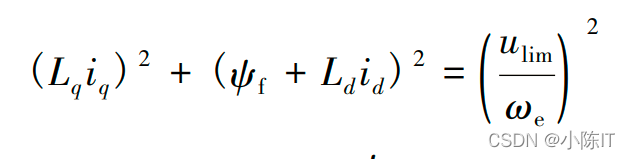 电流极限圆方程:
电流极限圆方程:
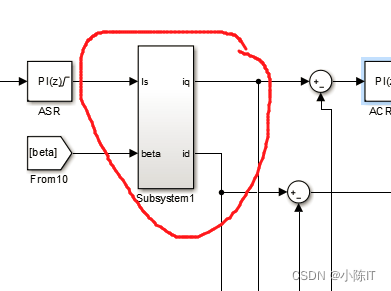
超前角弱磁控制框图
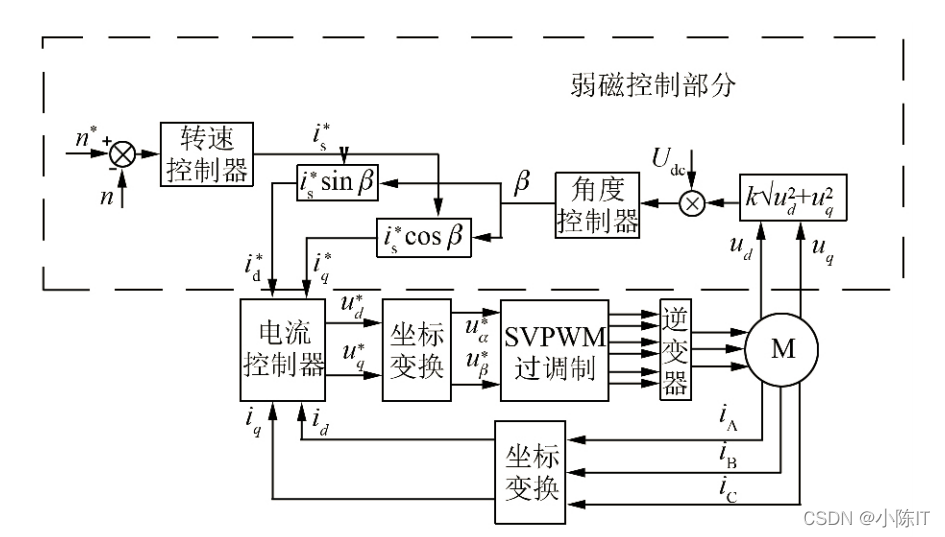
虚线框内即为超前角弱磁控制部分,转速环控制输出电流矢量的模,电压外环判断是否进入弱磁状态,系统检测电动机端电压 us 和直流母线电压 udc的偏差,通过电压调节器调节超前角 β 的大小。在进入弱磁阶段后,适当增大超前角 β,负向增大直轴电流 id,达到去磁目的,控制
过程主要分为 3 个阶段:
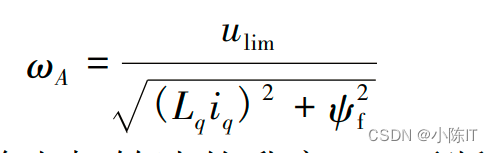
(1) 当电机端电压 us 小于直流母线电压时,电压外环 PI 控制器由于限幅环节的作用处于正向饱 和 状 态,输出的电流超前角 β = 0,id =-issinβ = 0,即为 id = 0 控制,电机处于基速以下的恒转矩运行状态。该阶段的转折速度为 A点工作状态,表达式为
 (2) 随着电机转速的升高,us 不断增大;当us 大于直流母线时,电压外环 PI 控制器输入电压差为负值,退出饱和状态,产生超前角 β,电机进入弱磁控制状态,且随着转速的升高 β 逐渐变大,d 轴去磁电流逐渐增大,q 轴电流逐渐减小。
(2) 随着电机转速的升高,us 不断增大;当us 大于直流母线时,电压外环 PI 控制器输入电压差为负值,退出饱和状态,产生超前角 β,电机进入弱磁控制状态,且随着转速的升高 β 逐渐变大,d 轴去磁电流逐渐增大,q 轴电流逐渐减小。
该系统中需要对交直轴电流进行限制,一方面是电机模型决定的最大去磁电流 idmax = ψf /Ld,一方面为驱动电路和电机所能承受的最大定子电
流 ilim。综合以上两点,限制直轴电流 id 为
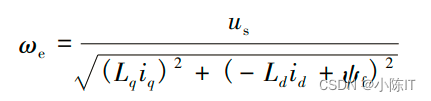
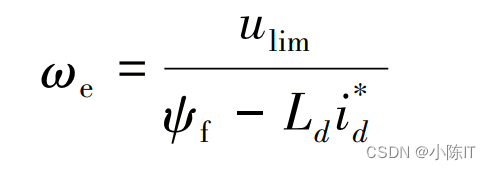
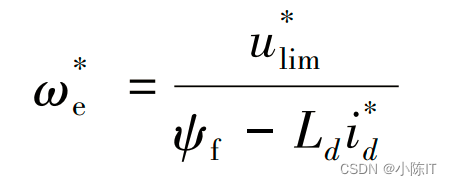
 该阶段电机达到最大转速对应于:id 达到最大值 id ,β 为 π/2,iq 为 0。电机极限转速的表达式为
该阶段电机达到最大转速对应于:id 达到最大值 id ,β 为 π/2,iq 为 0。电机极限转速的表达式为
 (3) 电机在弱磁状态下达到极限转速以后进入过调制处理,根据零矢量的作用时间调整非零矢量的作用时间来提高逆变器输出电压。该状态
(3) 电机在弱磁状态下达到极限转速以后进入过调制处理,根据零矢量的作用时间调整非零矢量的作用时间来提高逆变器输出电压。该状态
下最高输出电压 u*lim = 1.05udc。此时电机转速为
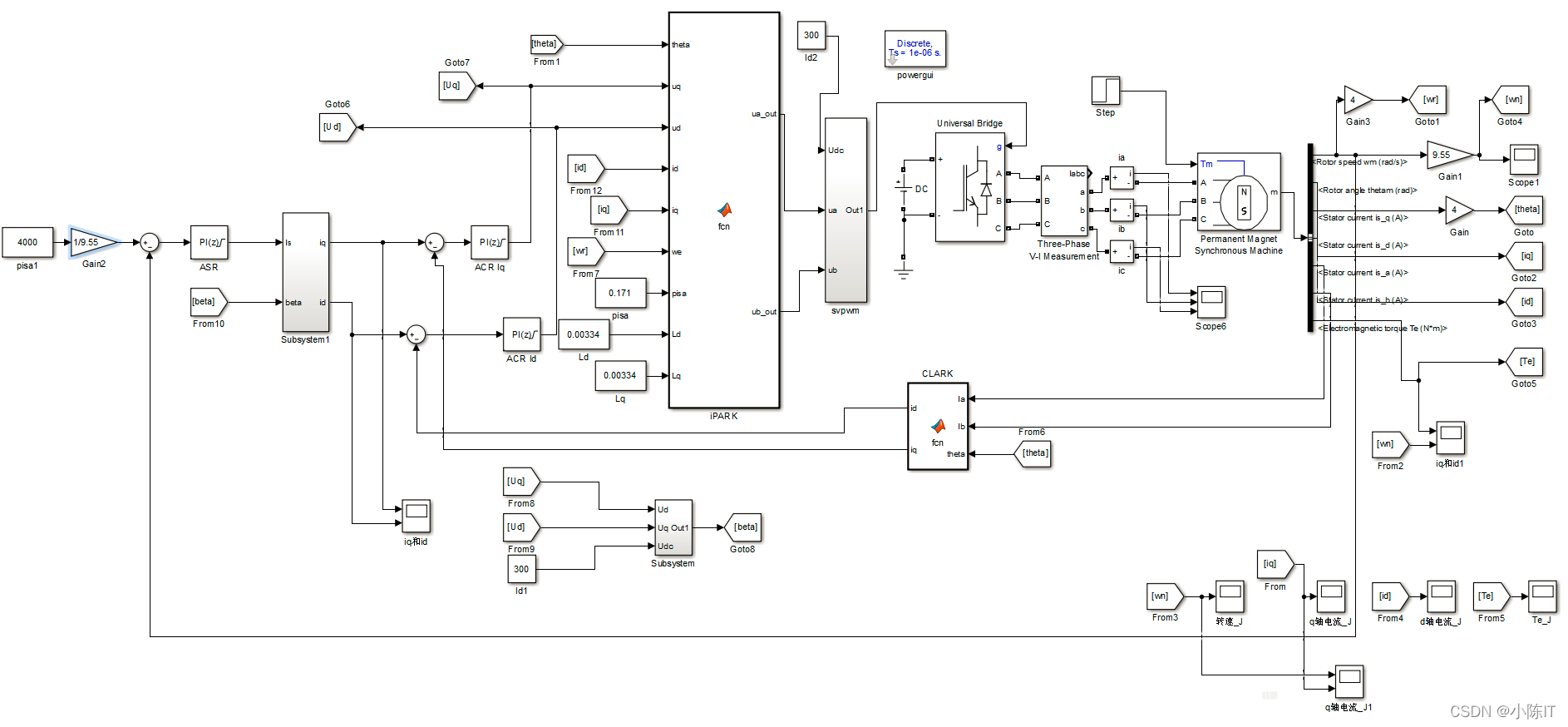
 simulink框图:(根据上面的控制框图搭建)
simulink框图:(根据上面的控制框图搭建)
 转速环:
转速环:
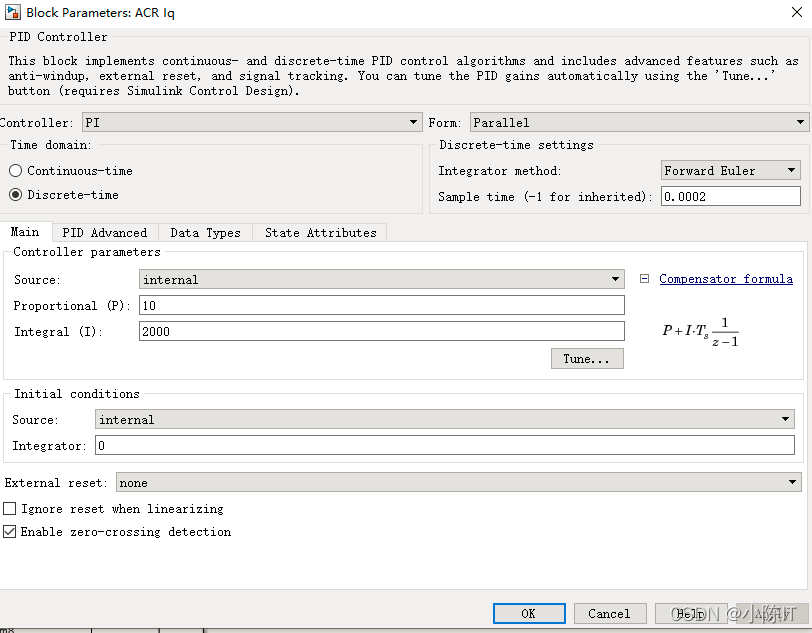
电流环:
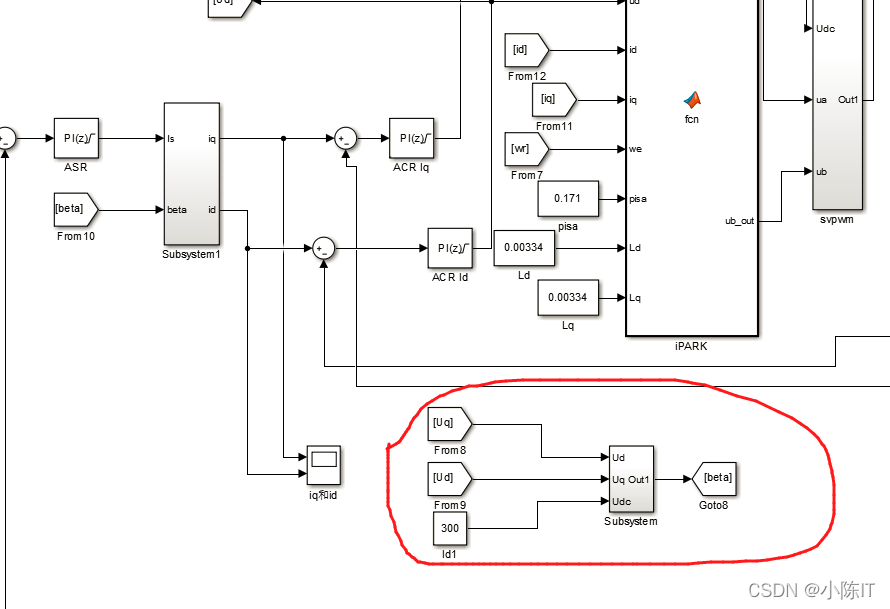
 弱磁控制环节:
弱磁控制环节:
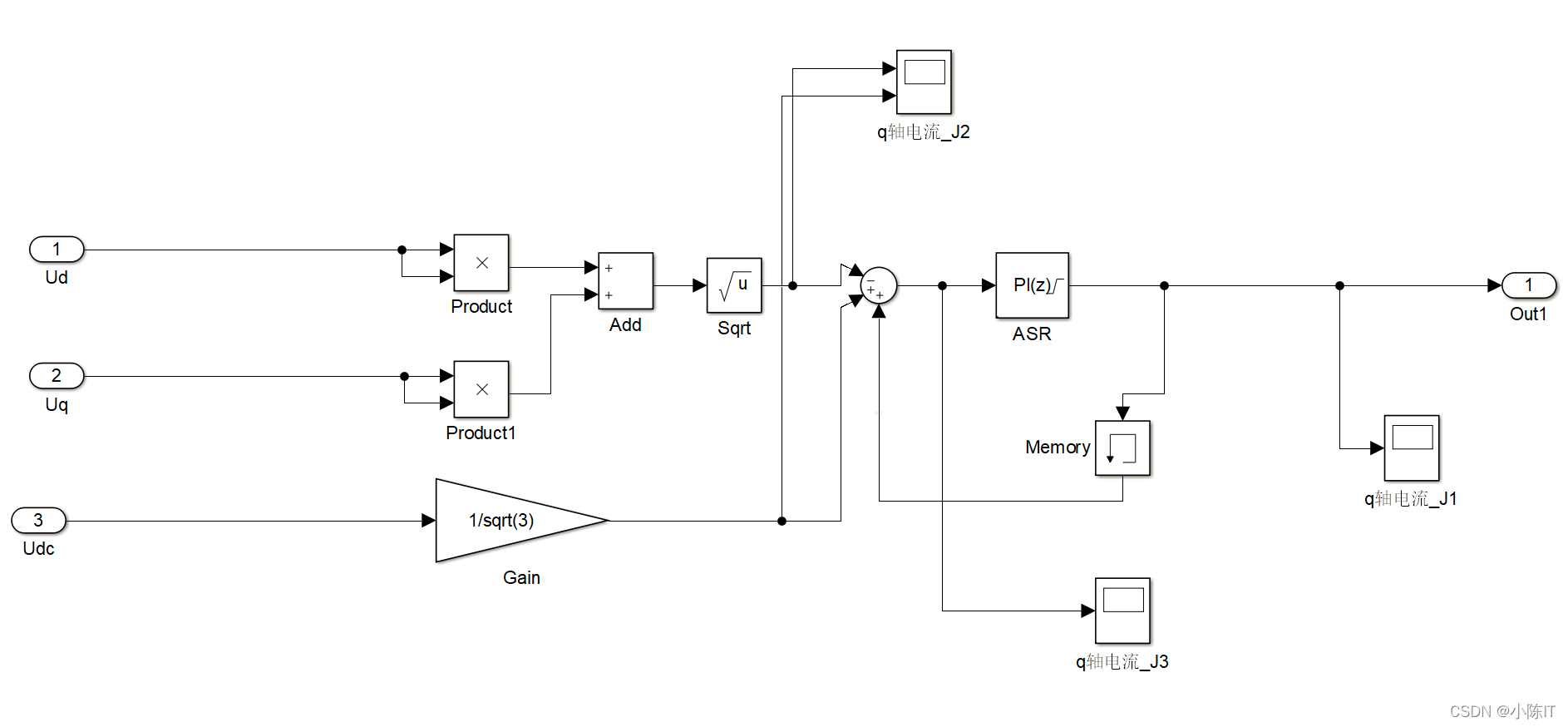
 其内部为:
其内部为:
 反prak(ipark)代码
反prak(ipark)代码
function [ua_out,ub_out] = fcn(theta,uq,ud, id,iq,we,pisa,Ld,Lq)
ud=ud-iq*we*Lq;
uq=uq+id*we*Ld+we*pisa;
ua_out=ud*cos(theta)-uq*sin(theta);
ub_out=ud*sin(theta)+uq*cos(theta);
end
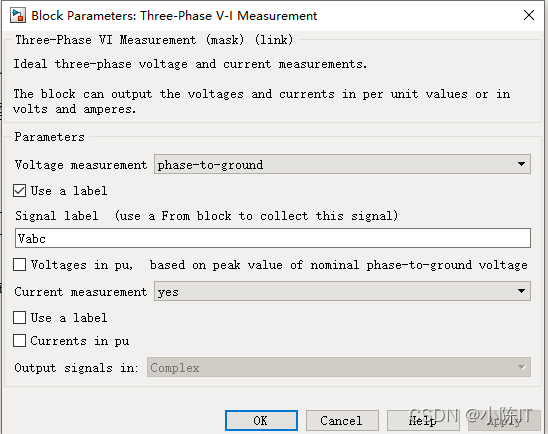
Three-Phase V-I Measurement参数:
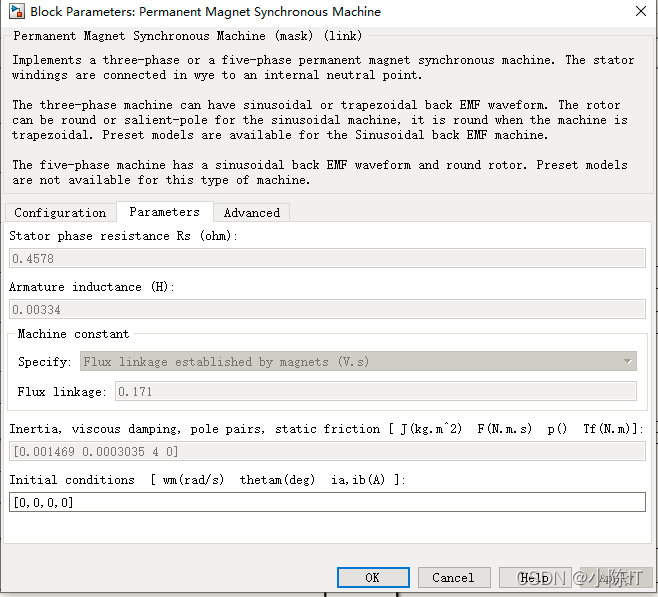
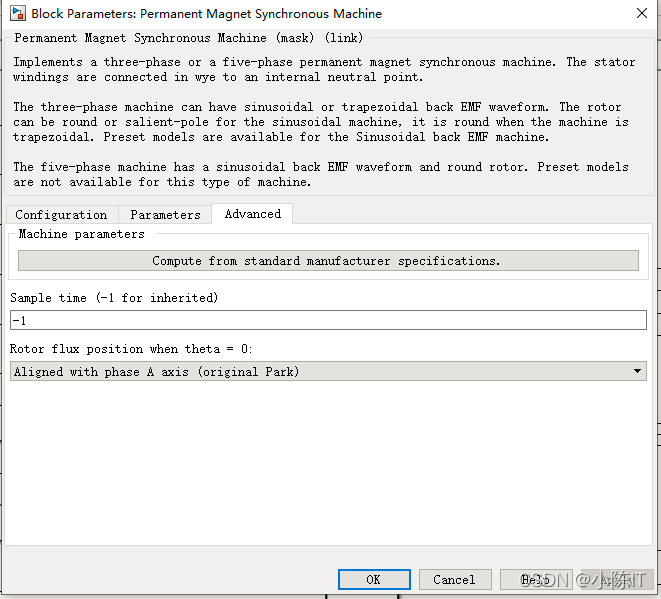
Permanent Magnet Synchronous Machine参数:
计算beita角:
其内部为:
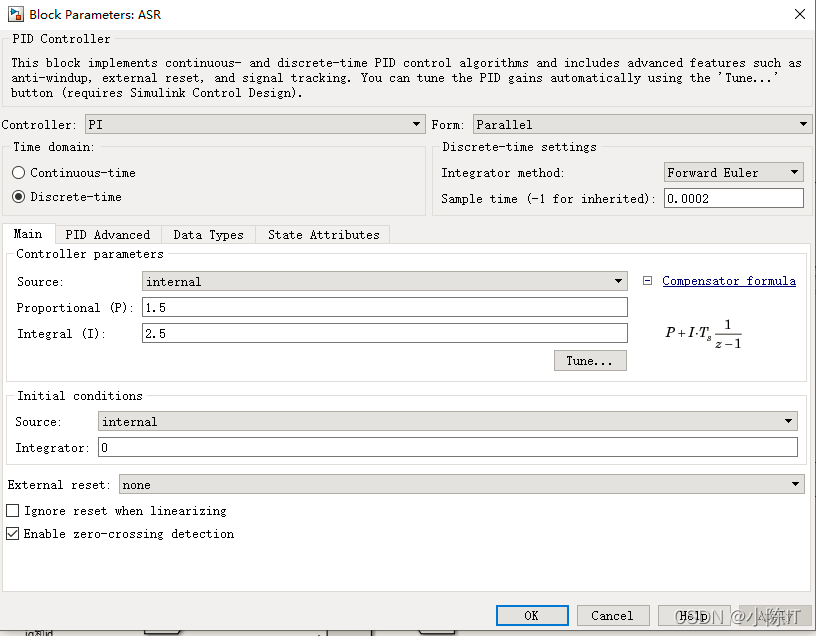
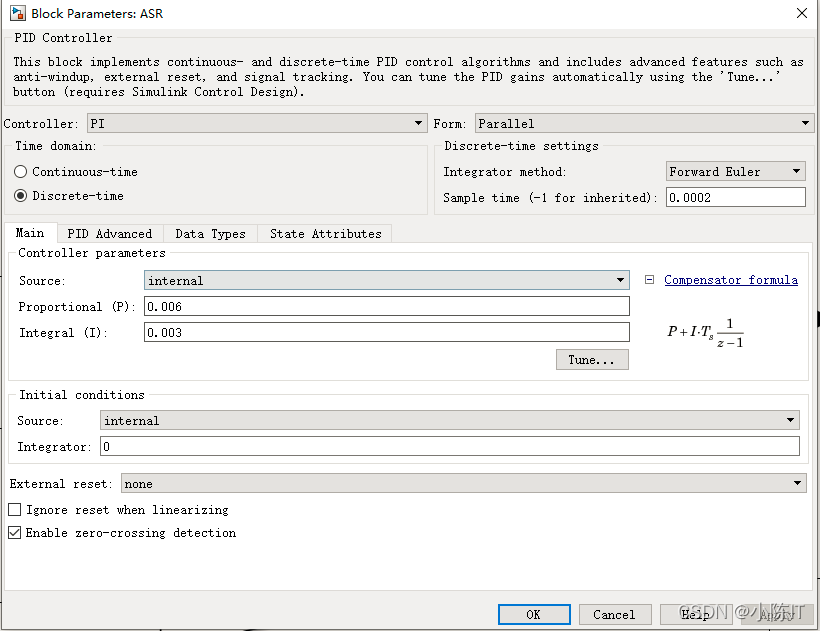
 其ASR参数为:
其ASR参数为:
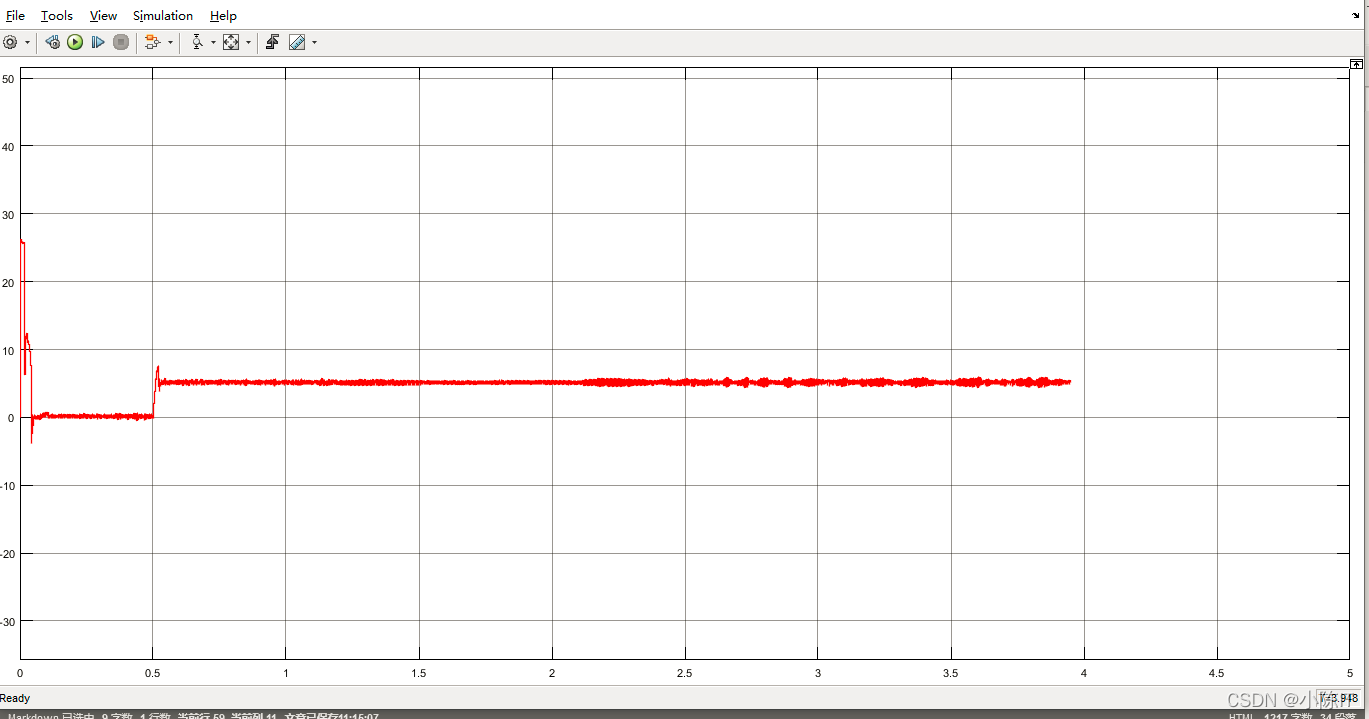
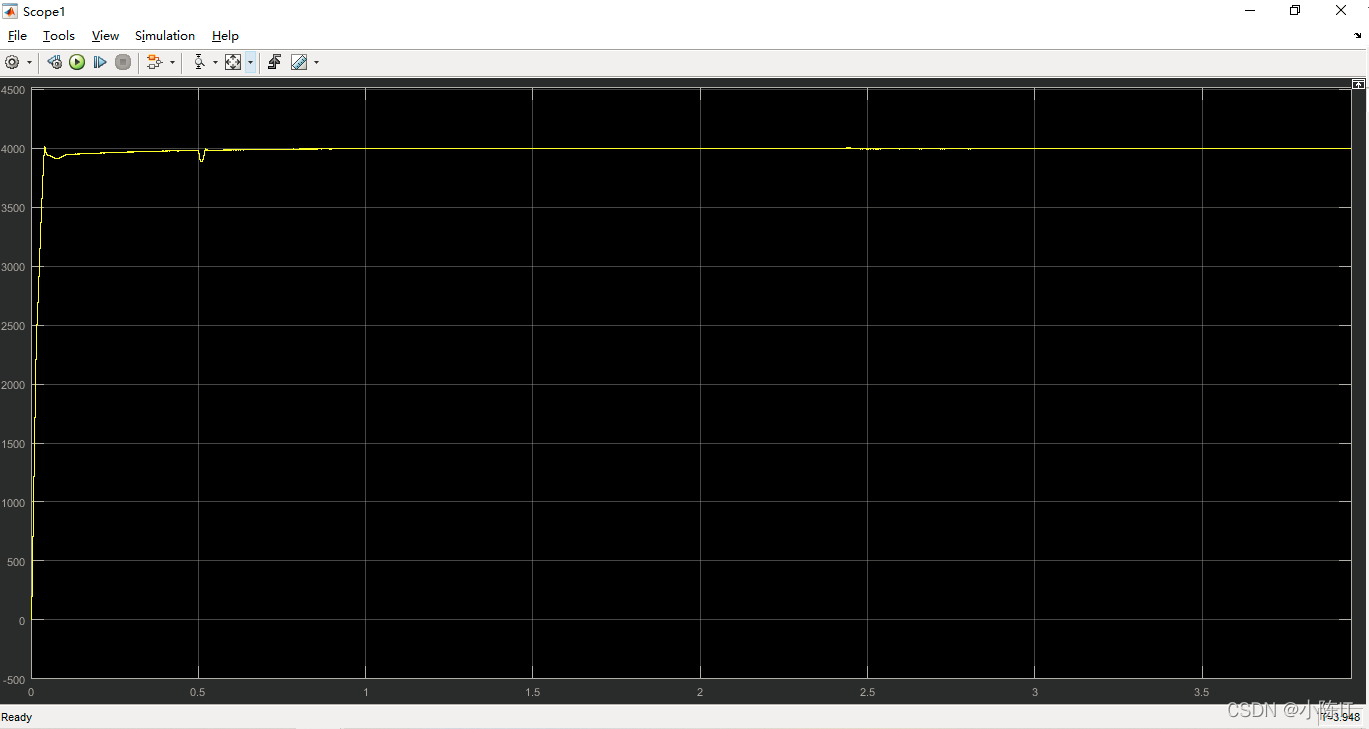
转速波形:
 转矩波形:
转矩波形: