Android系统启动篇
4,《Android SystemServer进程启动流程》
Android系统开发准备篇
3,《Android Framework代码IDE加载和调试》
Android系统开发实践篇
4,《android单独编译framework模块并push》
Android系统开发核心知识储备篇
1,《Android编译系统-envsetup和lunch代码篇》
6,《Android中Activity、View和Window关系详解》
11,《android中AMS进程通知Zygote进程fork新进程的通信方式》
Android核心功能详解篇
2,《Android 手势导航(从下往上滑动进入多任务页面)》
3,《android手势分析(应用界面左往右边滑动退出应用)》
———————————————————————————————————————————
目录
一,背景知识
android启动流程如下,
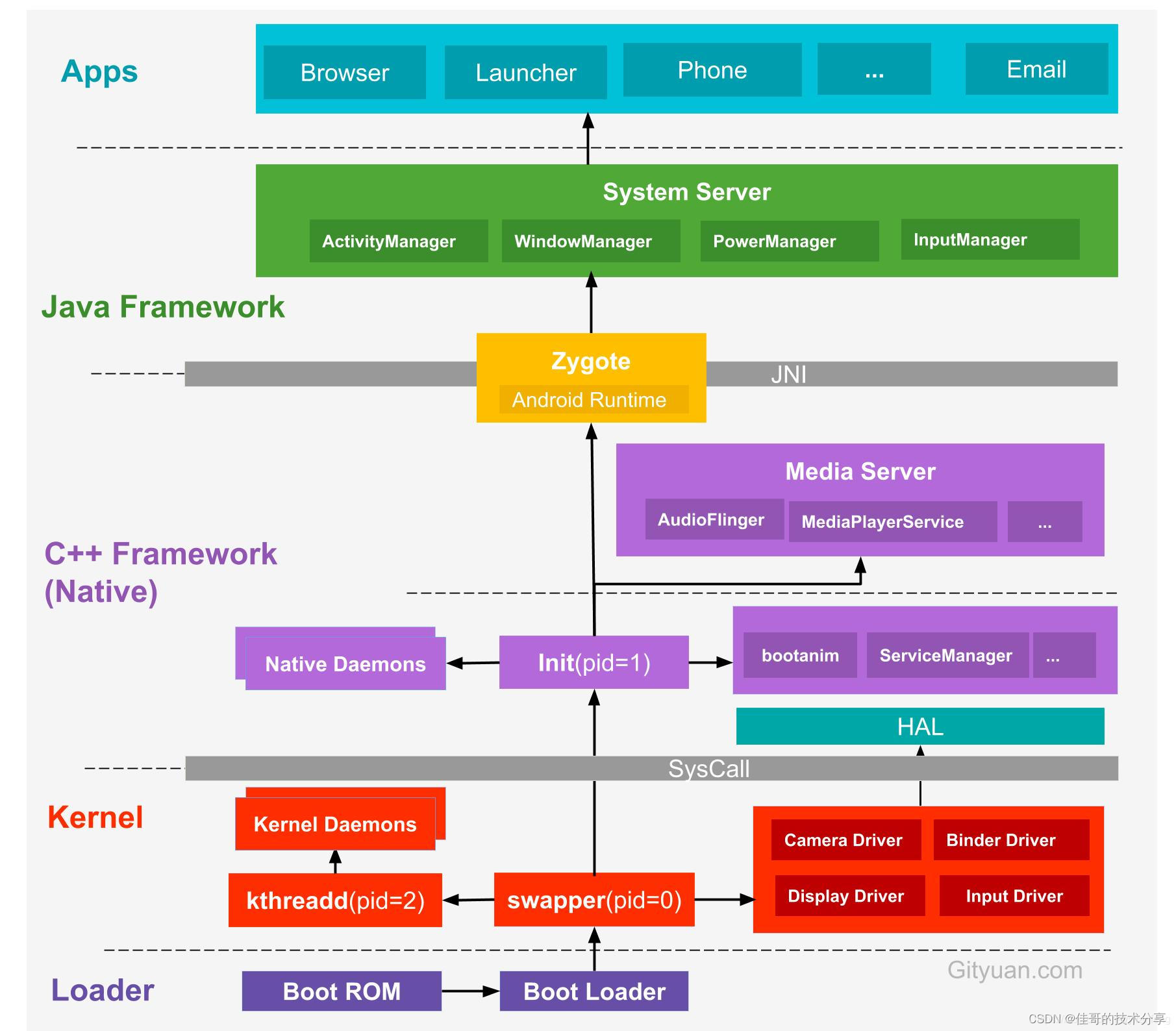
android系统基于Linux系统之上,启动步骤如上。init进程作为用户态第一个进程,从事android framework或 app相关开发工作,分析init进程启动流程很有必要。
二,init进程启动流程
init 进程入口system/core/init/main.cpp,
using namespace android::init;
/*
* 1.第一个参数argc表示参数个数,第二个参数是参数列表,也就是具体的参数
* 2.main函数有四个参数入口,
*一是参数中有ueventd,进入ueventd_main
*二是参数中有subcontext,进入InitLogging 和SubcontextMain
*三是参数中有selinux_setup,进入SetupSelinux
*四是参数中有second_stage,进入SecondStageMain
*3.main的执行顺序如下:
* (1)ueventd_main init进程创建子进程ueventd,
* 并将创建设备节点文件的工作托付给ueventd,ueventd通过两种方式创建设备节点文件
* (2)FirstStageMain 启动第一阶段
* (3)SetupSelinux 加载selinux规则,并设置selinux日志,完成SELinux相关工作
* (4)SecondStageMain 启动第二阶段
*/
int main(int argc, char** argv) {
#if __has_feature(address_sanitizer)
__asan_set_error_report_callback(AsanReportCallback);
#endif
//当argv[0]的内容为ueventd时,strcmp的值为0,!strcmp为1
//1表示true,也就执行ueventd_main,ueventd主要是负责设备节点的创建、权限设定等一些列工作
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
//当传入的参数个数大于1时,执行下面的几个操作
if (argc > 1) {
if (!strcmp(argv[1], "subcontext")) {
android::base::InitLogging(argv, &android::base::KernelLogger);
const BuiltinFunctionMap& function_map = GetBuiltinFunctionMap();
return SubcontextMain(argc, argv, &function_map);
}
//参数为“selinux_setup”,启动Selinux安全策略
if (!strcmp(argv[1], "selinux_setup")) {
return SetupSelinux(argv);
}
//参数为“second_stage”,启动init进程第二阶段
if (!strcmp(argv[1], "second_stage")) {
return SecondStageMain(argc, argv);
}
}
// 默认启动init进程第一阶段
return FirstStageMain(argc, argv);
}
2.1 ueventd_main
代码路径:platform/system/core/init/ueventd.cpp
Android根文件系统的镜像中不存在“/dev”目录,该目录是init进程启动后动态创建的。
因此,建立Android中设备节点文件的重任,也落在了init进程身上。为此,init进程创建子进程ueventd,并将创建设备节点文件的工作托付给ueventd。
ueventd通过两种方式创建设备节点文件。
第一种方式对应“冷插拔”(Cold Plug),即以预先定义的设备信息为基础,当ueventd启动后,统一创建设备节点文件。这一类设备节点文件也被称为静态节点文件。
第二种方式对应“热插拔”(Hot Plug),即在系统运行中,当有设备插入USB端口时,ueventd就会接收到这一事件,为插入的设备动态创建设备节点文件。这一类设备节点文件也被称为动态节点文件。
int ueventd_main(int argc, char** argv) {
/*
* init sets the umask to 077 for forked processes. We need to
* create files with exact permissions, without modification by
* the umask.
*/
//设置新建文件的默认值,这个与chmod相反,这里相当于新建文件后的权限为666
umask(000);
//初始化内核日志,位于节点/dev/kmsg, 此时logd、logcat进程还没有起来,
//采用kernel的log系统,打开的设备节点/dev/kmsg, 那么可通过cat /dev/kmsg来获取内核log。
android::base::InitLogging(argv, &android::base::KernelLogger);
LOG(INFO) << "ueventd started!";
//注册selinux相关的用于打印log的回调函数
SelinuxSetupKernelLogging();
SelabelInitialize();
std::vector<std::unique_ptr<UeventHandler>> uevent_handlers;
// Keep the current product name base configuration so we remain backwards compatible and
// allow it to override everything.
// TODO: cleanup platform ueventd.rc to remove vendor specific device node entries (b/34968103)
auto hardware = android::base::GetProperty("ro.hardware", "");
//解析xml,根据不同SOC厂商获取不同的hardware rc文件
auto ueventd_configuration = ParseConfig({"/system/etc/ueventd.rc", "/vendor/ueventd.rc",
"/odm/ueventd.rc", "/ueventd." + hardware + ".rc"});
uevent_handlers.emplace_back(std::make_unique<DeviceHandler>(
std::move(ueventd_configuration.dev_permissions),
std::move(ueventd_configuration.sysfs_permissions),
std::move(ueventd_configuration.subsystems), android::fs_mgr::GetBootDevices(), true));
uevent_handlers.emplace_back(std::make_unique<FirmwareHandler>(
std::move(ueventd_configuration.firmware_directories),
std::move(ueventd_configuration.external_firmware_handlers)));
if (ueventd_configuration.enable_modalias_handling) {
std::vector<std::string> base_paths = {"/odm/lib/modules", "/vendor/lib/modules"};
uevent_handlers.emplace_back(std::make_unique<ModaliasHandler>(base_paths));
}
UeventListener uevent_listener(ueventd_configuration.uevent_socket_rcvbuf_size);
//冷启动
if (!android::base::GetBoolProperty(kColdBootDoneProp, false)) {
ColdBoot cold_boot(uevent_listener, uevent_handlers,
ueventd_configuration.enable_parallel_restorecon);
cold_boot.Run();
}
for (auto& uevent_handler : uevent_handlers) {
uevent_handler->ColdbootDone();
}
// We use waitpid() in ColdBoot, so we can't ignore SIGCHLD until now.
signal(SIGCHLD, SIG_IGN);
// Reap and pending children that exited between the last call to waitpid() and setting SIG_IGN
// for SIGCHLD above.
while (waitpid(-1, nullptr, WNOHANG) > 0) {
}
//监听来自驱动的uevent,进行“热插拔”处理
uevent_listener.Poll([&uevent_handlers](const Uevent& uevent) {
for (auto& uevent_handler : uevent_handlers) {
uevent_handler->HandleUevent(uevent);
}
return ListenerAction::kContinue;
});
return 0;
}2.2 init 进程启动第一阶段
代码路径:platform\system\core\init\first_stage_init.cpp
init进程第一阶段做的主要工作是挂载分区,创建设备节点和一些关键目录,初始化日志输出系统,启用SELinux安全策略
第一阶段完成以下内容:
/* 01. 创建文件系统目录并挂载相关的文件系统 */
/* 02. 屏蔽标准的输入输出/初始化内核log系统 */
int FirstStageMain(int argc, char** argv) {
//init crash时重启引导加载程序
//这个函数主要作用将各种信号量,如SIGABRT,SIGBUS等的行为设置为SA_RESTART,一旦监听到这些信号即执行重启系统
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
//清空文件权限
umask(0);
CHECKCALL(clearenv());
CHECKCALL(setenv("PATH", _PATH_DEFPATH, 1));
//在RAM内存上获取基本的文件系统,剩余的被rc文件所用
CHECKCALL(mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755"));
CHECKCALL(mkdir("/dev/pts", 0755));
CHECKCALL(mkdir("/dev/socket", 0755));
CHECKCALL(mount("devpts", "/dev/pts", "devpts", 0, NULL));
#define MAKE_STR(x) __STRING(x)
CHECKCALL(mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC)));
#undef MAKE_STR
// 非特权应用不能使用Andrlid cmdline
CHECKCALL(chmod("/proc/cmdline", 0440));
gid_t groups[] = {AID_READPROC};
CHECKCALL(setgroups(arraysize(groups), groups));
CHECKCALL(mount("sysfs", "/sys", "sysfs", 0, NULL));
CHECKCALL(mount("selinuxfs", "/sys/fs/selinux", "selinuxfs", 0, NULL));
CHECKCALL(mknod("/dev/kmsg", S_IFCHR | 0600, makedev(1, 11)));
if constexpr (WORLD_WRITABLE_KMSG) {
CHECKCALL(mknod("/dev/kmsg_debug", S_IFCHR | 0622, makedev(1, 11)));
}
CHECKCALL(mknod("/dev/random", S_IFCHR | 0666, makedev(1, 8)));
CHECKCALL(mknod("/dev/urandom", S_IFCHR | 0666, makedev(1, 9)));
//这对于日志包装器是必需的,它在ueventd运行之前被调用
CHECKCALL(mknod("/dev/ptmx", S_IFCHR | 0666, makedev(5, 2)));
CHECKCALL(mknod("/dev/null", S_IFCHR | 0666, makedev(1, 3)));
//在第一阶段挂在tmpfs、mnt/vendor、mount/product分区。其他的分区不需要在第一阶段加载,
//只需要在第二阶段通过rc文件解析来加载。
CHECKCALL(mount("tmpfs", "/mnt", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=1000"));
//创建可供读写的vendor目录
CHECKCALL(mkdir("/mnt/vendor", 0755));
// /mnt/product is used to mount product-specific partitions that can not be
// part of the product partition, e.g. because they are mounted read-write.
CHECKCALL(mkdir("/mnt/product", 0755));
// 挂载APEX,这在Android 10.0中特殊引入,用来解决碎片化问题,类似一种组件方式,对Treble的增强,
// 不写谷歌特殊更新不需要完整升级整个系统版本,只需要像升级APK一样,进行APEX组件升级
CHECKCALL(mount("tmpfs", "/apex", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=0"));
// /debug_ramdisk is used to preserve additional files from the debug ramdisk
CHECKCALL(mount("tmpfs", "/debug_ramdisk", "tmpfs", MS_NOEXEC | MS_NOSUID | MS_NODEV,
"mode=0755,uid=0,gid=0"));
#undef CHECKCALL
//把标准输入、标准输出和标准错误重定向到空设备文件"/dev/null"
SetStdioToDevNull(argv);
//在/dev目录下挂载好 tmpfs 以及 kmsg
//这样就可以初始化 /kernel Log 系统,供用户打印log
InitKernelLogging(argv);
...
/* 初始化一些必须的分区
*主要作用是去解析/proc/device-tree/firmware/android/fstab,
* 然后得到"/system", "/vendor", "/odm"三个目录的挂载信息
*/
if (!DoFirstStageMount()) {
LOG(FATAL) << "Failed to mount required partitions early ...";
}
struct stat new_root_info;
if (stat("/", &new_root_info) != 0) {
PLOG(ERROR) << "Could not stat(\"/\"), not freeing ramdisk";
old_root_dir.reset();
}
if (old_root_dir && old_root_info.st_dev != new_root_info.st_dev) {
FreeRamdisk(old_root_dir.get(), old_root_info.st_dev);
}
SetInitAvbVersionInRecovery();
static constexpr uint32_t kNanosecondsPerMillisecond = 1e6;
uint64_t start_ms = start_time.time_since_epoch().count() / kNanosecondsPerMillisecond;
setenv("INIT_STARTED_AT", std::to_string(start_ms).c_str(), 1);
//启动init进程,传入参数selinux_steup
// 执行命令: /system/bin/init selinux_setup
const char* path = "/system/bin/init";
const char* args[] = {path, "selinux_setup", nullptr};
execv(path, const_cast<char**>(args));
PLOG(FATAL) << "execv(\"" << path << "\") failed";
return 1;
}2.3 加载SELinux规则
SELinux是「Security-Enhanced Linux」的简称,是美国国家安全局「NSA=The National Security Agency」和SCC(Secure Computing Corporation)开发的 Linux的一个扩张强制访问控制安全模块。
在这种访问控制体系的限制下,进程只能访问那些在他的任务中所需要文件。
selinux有两种工作模式:
1,permissive,所有的操作都被允许(即没有MAC),但是如果违反权限的话,会记录日志,一般eng模式用
2,enforcing,所有操作都会进行权限检查。一般user和user-debug模式用
不管是security_setenforce还是security_getenforce都是去操作/sys/fs/selinux/enforce 文件, 0表示permissive 1表示enforcing
2.4 init进程启动第二阶段
第二阶段主要内容:
1,创建进程会话密钥并初始化属性系统
2,进行SELinux第二阶段
3,新建epoll并初始化
4,启动匹配属性的服务端
5,解析init.rc等文件,建立rc文件的action 、service,启动其他进程
int SecondStageMain(int argc, char** argv) {
/*
*init crash时重启引导加载程序
*这个函数主要作用将各种信号量,如SIGABRT,SIGBUS等的行为设置为SA_RESTART,一旦监听到这些信号即执行重启系统
*/
if (REBOOT_BOOTLOADER_ON_PANIC) {
InstallRebootSignalHandlers();
}
//把标准输入、标准输出和标准错误重定向到空设备文件"/dev/null"
SetStdioToDevNull(argv);
//在/dev目录下挂载好 tmpfs 以及 kmsg
//这样就可以初始化 /kernel Log 系统,供用户打印log
InitKernelLogging(argv);
LOG(INFO) << "init second stage started!";
// 01. 创建进程会话密钥并初始化属性系统
keyctl_get_keyring_ID(KEY_SPEC_SESSION_KEYRING, 1);
//创建 /dev/.booting 文件,就是个标记,表示booting进行中
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
// 初始化属性系统,并从指定文件读取属性
property_init();
/*
* 1.如果参数同时从命令行和DT传过来,DT的优先级总是大于命令行的
* 2.DT即device-tree,中文意思是设备树,这里面记录自己的硬件配置和系统运行参数,
*/
process_kernel_dt(); // 处理 DT属性
process_kernel_cmdline(); // 处理命令行属性
// 处理一些其他的属性
export_kernel_boot_props();
// Make the time that init started available for bootstat to log.
property_set("ro.boottime.init", getenv("INIT_STARTED_AT"));
property_set("ro.boottime.init.selinux", getenv("INIT_SELINUX_TOOK"));
// Set libavb version for Framework-only OTA match in Treble build.
const char* avb_version = getenv("INIT_AVB_VERSION");
if (avb_version) property_set("ro.boot.avb_version", avb_version);
// See if need to load debug props to allow adb root, when the device is unlocked.
const char* force_debuggable_env = getenv("INIT_FORCE_DEBUGGABLE");
if (force_debuggable_env && AvbHandle::IsDeviceUnlocked()) {
load_debug_prop = "true"s == force_debuggable_env;
}
// 基于cmdline设置memcg属性
bool memcg_enabled = android::base::GetBoolProperty("ro.boot.memcg",false);
if (memcg_enabled) {
// root memory control cgroup
mkdir("/dev/memcg", 0700);
chown("/dev/memcg",AID_ROOT,AID_SYSTEM);
mount("none", "/dev/memcg", "cgroup", 0, "memory");
// app mem cgroups, used by activity manager, lmkd and zygote
mkdir("/dev/memcg/apps/",0755);
chown("/dev/memcg/apps/",AID_SYSTEM,AID_SYSTEM);
mkdir("/dev/memcg/system",0550);
chown("/dev/memcg/system",AID_SYSTEM,AID_SYSTEM);
}
// 清空这些环境变量,之前已经存到了系统属性中去了
unsetenv("INIT_STARTED_AT");
unsetenv("INIT_SELINUX_TOOK");
unsetenv("INIT_AVB_VERSION");
unsetenv("INIT_FORCE_DEBUGGABLE");
// Now set up SELinux for second stage.
SelinuxSetupKernelLogging();
SelabelInitialize();
/*
* 02. 进行SELinux第二阶段并恢复一些文件安全上下文
* 恢复相关文件的安全上下文,因为这些文件是在SELinux安全机制初始化前创建的,
* 所以需要重新恢复上下文
*/
SelinuxRestoreContext();
/*
* 03. 新建epoll并初始化子进程终止信号处理函数
* 创建epoll实例,并返回epoll的文件描述符
*/
Epoll epoll;
if (auto result = epoll.Open(); !result) {
PLOG(FATAL) << result.error();
}
/*
*主要是创建handler处理子进程终止信号,注册一个signal到epoll进行监听
*进行子继承处理
*/
InstallSignalFdHandler(&epoll);
// 进行默认属性配置相关的工作
property_load_boot_defaults(load_debug_prop);
UmountDebugRamdisk();
fs_mgr_vendor_overlay_mount_all();
export_oem_lock_status();
/*
*04. 设置其他系统属性并开启系统属性服务
*/
StartPropertyService(&epoll);
MountHandler mount_handler(&epoll);
//为USB存储设置udc Contorller, sys/class/udc
set_usb_controller();
// 匹配命令和函数之间的对应关系
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
if (!SetupMountNamespaces()) {
PLOG(FATAL) << "SetupMountNamespaces failed";
}
// 初始化文件上下文
subcontexts = InitializeSubcontexts();
/*
*05 解析init.rc等文件,建立rc文件的action 、service,启动其他进程
*/
ActionManager& am = ActionManager::GetInstance();
ServiceList& sm = ServiceList::GetInstance();
LoadBootScripts(am, sm);
// Turning this on and letting the INFO logging be discarded adds 0.2s to
// Nexus 9 boot time, so it's disabled by default.
if (false) DumpState();
// 当GSI脚本running时,确保GSI状态可用.
if (android::gsi::IsGsiRunning()) {
property_set("ro.gsid.image_running", "1");
} else {
property_set("ro.gsid.image_running", "0");
}
am.QueueBuiltinAction(SetupCgroupsAction, "SetupCgroups");
// 执行rc文件中触发器为 on early-init 的语句
am.QueueEventTrigger("early-init");
// 等冷插拔设备初始化完成
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// 开始查询来自 /dev的 action
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
am.QueueBuiltinAction(SetMmapRndBitsAction, "SetMmapRndBits");
am.QueueBuiltinAction(SetKptrRestrictAction, "SetKptrRestrict");
// 设备组合键的初始化操作
Keychords keychords;
am.QueueBuiltinAction(
[&epoll, &keychords](const BuiltinArguments& args) -> Result<Success> {
for (const auto& svc : ServiceList::GetInstance()) {
keychords.Register(svc->keycodes());
}
keychords.Start(&epoll, HandleKeychord);
return Success();
},
"KeychordInit");
//在屏幕上显示Android 静态LOGO
am.QueueBuiltinAction(console_init_action, "console_init");
// 执行rc文件中触发器为on init的语句
am.QueueEventTrigger("init");
// Starting the BoringSSL self test, for NIAP certification compliance.
am.QueueBuiltinAction(StartBoringSslSelfTest, "StartBoringSslSelfTest");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(MixHwrngIntoLinuxRngAction, "MixHwrngIntoLinuxRng");
// Initialize binder before bringing up other system services
am.QueueBuiltinAction(InitBinder, "InitBinder");
// 当设备处于充电模式时,不需要mount文件系统或者启动系统服务
// 充电模式下,将charger假如执行队列,否则把late-init假如执行队列
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// 基于属性当前状态 运行所有的属性触发器.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
while (true) {
// By default, sleep until something happens.
auto epoll_timeout = std::optional<std::chrono::milliseconds>{};
if (do_shutdown && !shutting_down) {
do_shutdown = false;
if (HandlePowerctlMessage(shutdown_command)) {
shutting_down = true;
}
}
//依次执行每个action中携带command对应的执行函数
if (!(waiting_for_prop || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
if (!(waiting_for_prop || Service::is_exec_service_running())) {
if (!shutting_down) {
auto next_process_action_time = HandleProcessActions();
// If there's a process that needs restarting, wake up in time for that.
if (next_process_action_time) {
epoll_timeout = std::chrono::ceil<std::chrono::milliseconds>(
*next_process_action_time - boot_clock::now());
if (*epoll_timeout < 0ms) epoll_timeout = 0ms;
}
}
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout = 0ms;
}
// 循环等待事件发生
if (auto result = epoll.Wait(epoll_timeout); !result) {
LOG(ERROR) << result.error();
}
}
return 0;
}2.5 第三阶段init.rc
当属性服务建立完成后,init的自身功能基本就告一段落,接下来需要来启动其他的进程。但是init进程如何启动其它进程呢?其它进程都是一个二进制文件,我们可以直接通过exec的命令方式来启动,例如 ./system/bin/init second_stage,来启动init进程的第二阶段。但是Android系统有那么多的Native进程,如果都通过传exec在代码中一个个的来执行进程,那无疑是一个灾难性的设计。
在这个基础上Android推出了一个init.rc的机制,即类似通过读取配置文件的方式,来启动不同的进程。接下来我们就来看看init.rc是如何工作的。
2.5.1 init.rc简介
Linux的重要特征之一就是一切都是以文件的形式存在的,例如,一个设备通常与一个或多个设备文件对应。这些与内核空间交互的文件都在用户空间,所以在Linux内核装载完,需要首先建立这些文件所在的目录。而完成这些工作的程序就是本文要介绍的init。Init是一个命令行程序。其主要工作之一就是建立这些与内核空间交互的文件所在的目录。当Linux内核加载完后,要做的第一件事就是调用init程序,也就是说,init是用户空间执行的第一个程序。 当然init程序的功能不仅仅是加载上面设备文件。 init.rc是一个配置文件,内部由Android初始化语言编写(Android Init Language)编写的脚本。
init.rc有两个,确切的说是两套,分别位于:
1,./system/core/rootdir/init.rc
2,./bootable/recovery/etc/init.rc
从目录上大致可以猜测,这两个init.rc使用场景不一样,一个是正常启动用到的;一个是刷机用到的,也就是进入recorvery模式。我们这里重点分析的是上面那个,也是init.c关联的那个。
/init.rc是主要的.rc文件,由init可执行文件在开始执行时加载。它负责系统的初始设置。
在加载主目录/init.rc后,init立即加载包含在/{system,vendor,odm}/etc/init/目录中的所有文件。
1,/system/etc/init/ 用于核心系统项,例如 SurfaceFlinger, MediaService和logd。
2,/vendor/etc/init/ 是针对SoC供应商的项目,如SoC核心功能所需的actions或守护进程。
3,/odm/etc/init/ 用于设备制造商的项目,如actions或运动传感器或其他外围功能所需的守护进程。
每个系统如何加载这些不同目录的.rc文件,需要具体看从init.rc开始的import语句。 其中,import /init.${ro.hardware}.rc 较为常见。通过cat proc/cpuinfo可以查看ro.hardware的值=Hardware的值;一般在cpuinfo文件的末尾。
2.5.2 init.rc语句说明
init.rc主要包含五种类型语句:Action,Command,Service,Option,Import
1,Actions:当达到某个触发条件时,执行命令,即响应某事件的过程,以on开头的语句来决定执行相应的service的时机,具体有如下时机:
on early-init; 在初始化早期阶段触发;
on init; 在初始化阶段触发;
on late-init; 在初始化晚期阶段触发;
on boot/charger: 当系统启动/充电时触发;
on property:<key>=<value>: 当属性值满足条件时触发;
Actions take the form of:
on <trigger> [&& <trigger>]* // 触发条件
<command> // 执行命令
<command>
<command>
2,Commands:命令将在所属事件发生时被一个个地执行,rc脚本中定义了许多命令,如
boot:init程序启动后触发的第一个事件
class_start <service_class_name>: 启动属于同一个class的所有服务;
class_stop <service_class_name> : 停止指定类的服务
start <service_name>: 启动指定的服务,若已启动则跳过;
stop <service_name>: 停止正在运行的服务
setprop <name> <value>:设置属性值
mkdir <path>:创建指定目录
symlink <target> <sym_link>: 创建连接到<target>的<sym_link>符号链接;
write <path> <string>: 向文件path中写入字符串;
exec: fork并执行,会阻塞init进程直到程序完毕;
exprot <name> <name>:设定环境变量;
loglevel <level>:设置log级别
hostname <name> : 设置主机名
import <filename> :导入一个额外的init配置文件
3,Services:服务Service,以 service开头,由init进程启动,一般运行在init的一个子进程,所以启动service前需要判断对应的可执行文件是否存在。
Services take the form of:
service <name> <pathname> [ <argument> ]*
<option>
<option>
...
// name:服务名称
// pathname:服务路径
// argument:启动服务传递的参数
// option:对服务的约束项
init生成的子进程,定义在rc文件,其中每一个service在启动时会通过fork方式生成子进程。例如: service servicemanager /system/bin/servicemanager代表的是服务名为servicemanager,服务执行的路径为/system/bin/servicemanager。
4,Options:服务修饰符,影响init进程运行服务的方式和时间。
1,class <class_name>
说明服务属于class_name这个类。缺省值service属于 “default” 类。同一个class下面的服务可以一起启动或停止。
2,disabled
表示当这个服务所在的class启动的时候,服务不会自动启动,
要用start server_name 或 property_set("ctl.start", server_name);才能启动。
3,oneshot
当服务退出后,不会再重新启动,如果没有加这个option,则服务默认退出后又会重新重启
4,user <username>
执行服务之前,先声明服务的用户名,缺省值应该为root用户.
5,group <groupname> [ <groupname> ]*
执行服务之前,先声明服务所属组名,可以一次声明属于多个组。
声明多个组时,除第一个组名外,其他的为服务的补充组名(调用接口 setgroups()).
6,onrestart + command
服务重启的时,会执行onrestart后面的command.
eg:onrestart restart media 重启名为media的服务
7,setenv <name> <value>
在当前服务进程中设置环境变量name的值为value。
注意:setenv定义的环境变量仅在本进程内生效,退出该进程,或者关闭相应的程序运行窗口,该环境变量即无效)
程序中可通过getenv("name")接口获取这个环境变量的值
setenv和export 的区别:
setenv csh ,本进程生效,退出后,变量无效
export bash ,全局生效,一直存在
格式:
export key=value
setenv key value
8,critical
声明为关键服务。如果服务在四分钟内退出了四次,则设备会进入recovery模式
9,socket <name> <type> <perm> [ <user> [ <group> ] ]
创建名为/dev/socket/<name>的unix domain socket ,并把它的句柄fd传给本服务进程
<type> 必须为 "dgram", "stream" or "seqpacket".User and group default to 0 ,也就是root.
10,seclablel 执行服务之前改变安全上下文5,Imports:引入其他rc配置文件,语法格式为import <path>
2.5.3 常用命令
1).import <filename>
导入init.XX.rc、xxx.conf等文件
Parse an init config file, extending the current configuration.
2).chmod <octal-mode> <path>
Change file access permissions.
3).chown <owner> <group> <path>
Change file owner and group.
4).chdir <directory>
Change working directory.
5).chroot <directory>
改变进程根目录
6).insmod <path>
加载XX.ko驱动模块
7).start <service>
Start a service running if it is not already running.
8).stop <service>
Stop a service from running if it is currently running.
9).class_start <serviceclass>
Start all services of the specified class if they are not already running.
10).class_stop <serviceclass>
Stop all services of the specified class if they are currently running.
class_reset <serviceclass> //重启class下面所有的服务
11).setprop <name> <value>
Set system property <name> to <value>.
通过getprop命令可以查看当前系统的属性值
12).export <name> <value>
设置全局环境变量,这个变量值可以被所有进程访问(全局的,一直存在)
在代码中通过value = getenv("name")接口可以获取这个环境变量的值
13).mkdir <path> [mode] [owner] [group]
创建目录,后面项缺省值为 mode,owner,group: 0755 root root
14).trigger <event>
Trigger an action. Used to queue an action from another action.
例:trigger post-fs-data
15).exec <path> [ <argument> ]*
执行<path>指定的Program,并可以带有执行参数。
exec在调用进程内部执行一个可执行文件,并会阻塞当前进程,直到运行完成。
最好避免和那些builtin commands一样使用exec命令,否则容易造成阻塞 or stuck ( maybe there should be a timeout?)
16).ifup <interface>
启动某个网络接口,使其为up状态,通过netcfg可以查看,ifup eth0 等价于 netcfg eth0 up 功能一样
17).hostname <name>
设置设备的主机名,一般默认设置为localhost,可以在终端通过hostname new_name进行修改
18).domainname <name>
设置网络域名localdomain
19).mount <type> <device> <dir> [ <mountoption> ]*
把device挂接到dir目录下面,文件系统类型为type。
<mountoption>s include "ro", "rw", "remount", "noatime", “nosuid”......,具体可查看[linux](http://lib.csdn.net/base/linux "Linux知识库")的mount命令说明
20).setkey
TBD == to be determined 暂时没有使用
21).setrlimit <resource> <cur> <max>
设置本服务进程的资源上限值。(使用例子??)
22).symlink <target> <path>
path 链接到 ---》target ;创建符号链接
23).sysclktz <mins_west_of_gmt>
设置系统时区(0 if system clock ticks in GMT)
24).wait <path> [ <timeout> ]
轮询查找给定的文件path是否存在,如果找到或者超时则返回默认超时为5秒。(使用实例???)
25).write <path> <string> [ <string> ]*
打开一个文件,利用write命令写入一个或多个字符串2.6 init.rc 解析过程
2.6.1 LoadBootScripts
代码路径:platform\system\core\init\init.cpp
说明:如果没有特殊配置ro.boot.init_rc,则解析./init.rc
把/system/etc/init,/product/etc/init,/product_services/etc/init,/odm/etc/init,
/vendor/etc/init 这几个路径加入init.rc之后解析的路径,在init.rc解析完成后,解析这些目录里的rc文件
static void LoadBootScripts(ActionManager& action_manager, ServiceList& service_list) {
Parser parser = CreateParser(action_manager, service_list);
std::string bootscript = GetProperty("ro.boot.init_rc", "");
if (bootscript.empty()) {
parser.ParseConfig("/init.rc");
if (!parser.ParseConfig("/system/etc/init")) {
late_import_paths.emplace_back("/system/etc/init");
}
if (!parser.ParseConfig("/product/etc/init")) {
late_import_paths.emplace_back("/product/etc/init");
}
if (!parser.ParseConfig("/product_services/etc/init")) {
late_import_paths.emplace_back("/product_services/etc/init");
}
if (!parser.ParseConfig("/odm/etc/init")) {
late_import_paths.emplace_back("/odm/etc/init");
}
if (!parser.ParseConfig("/vendor/etc/init")) {
late_import_paths.emplace_back("/vendor/etc/init");
}
} else {
parser.ParseConfig(bootscript);
}
}代码路径:platform\system\core\init\init.cpp
说明:创建Parser解析对象,例如service、on、import对象
Parser CreateParser(ActionManager& action_manager, ServiceList& service_list) {
Parser parser;
parser.AddSectionParser(
"service", std::make_unique<ServiceParser>(&service_list, subcontexts, std::nullopt));
parser.AddSectionParser("on", std::make_unique<ActionParser>(&action_manager, subcontexts));
parser.AddSectionParser("import", std::make_unique<ImportParser>(&parser));
return parser;
}2.6.2 执行Action动作
按顺序把相关Action加入触发器队列,按顺序为 early-init -> init -> late-init. 然后在循环中,执行所有触发器队列中Action带Command的执行函数。
am.QueueEventTrigger("early-init");
am.QueueEventTrigger("init");
am.QueueEventTrigger("late-init");
...
while (true) {
if (!(waiting_for_prop || Service::is_exec_service_running())) {
am.ExecuteOneCommand();
}
}2.6.3 Zygote启动
通过属性ro.zygote来控制不同版本的zygote进程启动。在init.rc的import段我们看到如下代码:
import /init.${ro.zygote}.rc // 可以看出init.rc不再直接引入一个固定的文件,而是根据属性ro.zygote的内容来引入不同的文件
init.rc位于/system/core/rootdir下。在这个路径下还包括四个关于zygote的rc文件。
分别是init.zygote32.rc,init.zygote32_64.rc,init.zygote64.rc,init.zygote64_32.rc,由硬件决定调用哪个文件。
这里拿64位处理器为例,init.zygote64.rc的代码如下所示:
service zygote /system/bin/app_process64 -Xzygote /system/bin --zygote --start-system-server
class main # class是一个option,指定zygote服务的类型为main
priority -20
user root
group root readproc reserved_disk
socket zygote stream 660 root system # socket关键字表示一个option,创建一个名为dev/socket/zygote,类型为stream,权限为660的socket
socket usap_pool_primary stream 660 root system
onrestart write /sys/android_power/request_state wake # onrestart是一个option,说明在zygote重启时需要执行的command
onrestart write /sys/power/state on
onrestart restart audioserver
onrestart restart cameraserver
onrestart restart media
onrestart restart netd
onrestart restart wificond
writepid /dev/cpuset/foreground/tasksservice zygote /system/bin/app_process64 -Xzygote /system/bin --zygote --start-system-server 解析:
service zygote :init.zygote64.rc 中定义了一个zygote服务。 init进程就是通过这个service名称来创建zygote进程
/system/bin/app_process64 -Xzygote /system/bin --zygote --start-system-server解析:
zygote这个服务,通过执行进行/system/bin/app_process64 并传入4个参数进行运行:
参数1:-Xzygote 该参数将作为虚拟机启动时所需的参数
参数2:/system/bin 代表虚拟机程序所在目录
参数3:--zygote 指明以ZygoteInit.java类中的main函数作为虚拟机执行入口
参数4:--start-system-server 告诉Zygote进程启动systemServer进程
三,总结
init进程第一阶段做的主要工作是挂载分区,创建设备节点和一些关键目录,初始化日志输出系统,启用SELinux安全策略。
init进程第二阶段主要工作是初始化属性系统,解析SELinux的匹配规则,处理子进程终止信号,启动系统属性服务,可以说每一项都很关键,如果说第一阶段是为属性系统,SELinux做准备,那么第二阶段就是真正去把这些功能落实。
init进行第三阶段主要是解析init.rc 来启动其他进程,进入无限循环,进行子进程实时监控。