Allan方差专有概念解释
1.量化噪声
量化噪声是一切量化操作所固有的噪声,只要进行数字量化编码采样,传感器输出的理想值与量化值之间就必然会存在微小的差别,量化噪声代表了传感器检测的最小分辨率水平。
2.角度随机游走
角度随机游走是宽带角速率白噪声积分的结果,即陀螺从零时刻起累积的总角增量误差表现为随机游走,而每一时刻的等效角速率误差表现为白噪声。根据随机过程理论,随机游走是一种独立增量过程,对于陀螺角度随机游走而言“独立增量”的含义便是:角速率白噪声在两相邻采样时刻进行积分(增量),不同时间段的积分值之间互不相关(独立)。
3.角速率随机游走
角速率随机游走是宽带角加速率白噪声积分的结果,即陀螺角速率误差表现为随机游走,而角加速率误差表现为白噪声。
4.零偏不稳定性
当输入角速度为零时,衡量光纤陀螺仪输出量围绕其均值的离散程度。以规定时间内输出量的标准偏差相应的等效输入角速度表示,也可称为零漂。
5.速率斜坡
角速率斜坡更像是一种确定性的误差,而不是随机误差。角速率斜坡常常由系统误差引起,比如环境温度的缓慢变化,通过严格的环境控制或引入补偿机制往往可以降低此类误差。
随机性误差建模
惯性器件的随机性误差建模和补偿常用的分析方法是Allan方差法。
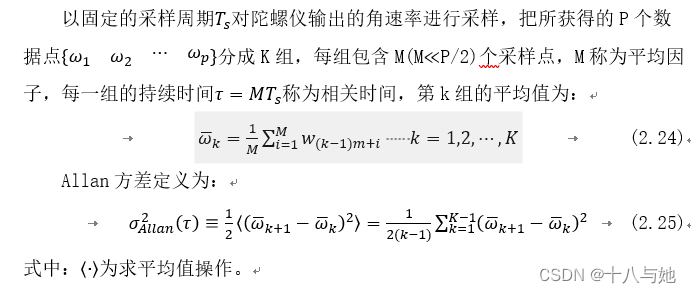
或通过下图所示公式也