首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
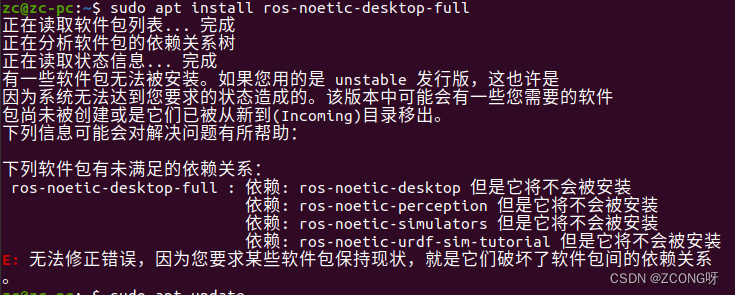
ros-noetic-desktop-full : 依赖: ros-noetic-desktop 但是它将不会被安装
企业开发
2023-07-02 03:23:14
阅读次数: 0
问题:
解决办法:在软件安和更新界面,按照如图所示,将订阅一栏改为:所有更新。
关闭软件更新,重新安装即可解决问题
猜你喜欢
转载自
blog.csdn.net/abc20150125/article/details/130082842
ros-noetic-desktop-full : 依赖: ros-noetic-desktop 但是它将不会被安装
【ROS】解决ros-Noetic-desktop-full安装过程中未满足的依赖关系问题 【转载】
关于ros-kinetic-desktop-full依赖: ros-kinetic-simulators 但是它将不会被安装"报错的解决办法
解决ros-melodic-desktop-full(18.04)安装过程中未满足的依赖关系问题(注:也可以解决20.04noetic的)
依赖: XXX 但是它将不会被安装
Ubuntu 20.04 安装 dotnet core 依赖: dotnet-runtime 但是它将不会被安装
依赖: nginx-common (= 1.14.0-0ubuntu1) 但是它将不会被安装
google-chrome-stable : 依赖: libappindicator1 但是它将不会被安装
python-roslaunch : 依赖: python-roslib 但是它将不会被安装
解决“python-roslaunch : 依赖: python-roslib 但是它将不会被安装”问题
ubuntu 14.04 安装ros-indigo-desktop-full Python依赖问题
ubuntu问题g++ : 依赖: g++-4.8 (>= 4.8.2-5~) 但是它将不会被安装
cuda : 依赖: cuda-9-0 (>= 9.0.176) 但是它将不会被安装 问题解决记录
ROS noetic,ROS melodic 安装 MoveIt 并运行
LINUX安装依赖库冲突,提示软件包有未满足的依赖关系、但是它将不会被安装、无法修正错误等
下列软件包有未满足的依赖关系: cuda : 依赖: cuda-9-0 (>= 9.0.176) 但是它将不会被安装
下列软件包有未满足的依赖关系: python-catkin-pkg : 依赖: python-catkin-pkg-modules (>= 0.5.2) 但是它将不会被安装
Ubuntu20.04安装ROS Noetic
Ubuntu 22.04源码编译安装ROS Noetic
Ubuntu20.04 ROS noetic安装教程
Ubuntu20.04 安装ROS Noetic
Ubuntu 22.04 apt 安装 ros1 ros Noetic Ninjemys
deepin-libwine-dev:i386 : 依赖: libc6-dev:i386 但是它将不会被安装 deepin-wine-binfmt : 依赖: binfmt-support dee
解决卸载ROS后再安装ROS出现依赖不会被安装报错问题
记录:解决Ubuntu安装ros报错E: Unable to locate package ros-kinetic-desktop-full
ROS1Noetic在Win11中安装记录
ubuntu20.04安装ros-noetic过程
ubuntu20.04安装ROS极简教程 (noetic)
ROS:ubuntu 20.04 noetic安装指南(简略版)
cartographer安装,ros版本noetic+ununtu20.04
今日推荐
周排行
LRU cache算法
windows10, 自带的OpenSSH, key权限问题, 文件权限问题
测试用例书写方法
HIVE-默认分隔符的(linux系统的特殊字符)查看,输入和修改
最贵的AMD 7nm显卡来了!这设计 够狂野
java多线程简单demo
[ 转载 ]在Android系统上使用busybox——最简单的方法
QT connect学习
BFSIFT算法分析
Xcode10:library not found for -lstdc++.6.0.9 临时解决
每日归档
更多
2024-08-06(0)
2024-08-05(0)
2024-08-04(0)
2024-08-03(0)
2024-08-02(0)
2024-08-01(0)
2024-07-31(0)
2024-07-30(0)
2024-07-29(0)
2024-07-28(0)