本文首先介绍几个常用的RTT统一的标准的I2C接口,然后以I2C接口的EEPROM芯片AT24C02为例,演示如何在龙芯1C上用RTT统一的I2C接口读取EEPROM芯片AT24C02。
在本文之前,已经写过几篇关于龙芯1C上,模拟I2C和硬件I2C,在裸机程序中和RTT中使用的文章,如下
【龙芯1c库】封装硬件I2C接口和使用示例
http://blog.csdn.net/caogos/article/details/77891546
在RT-Thread上使用龙芯1c库中的硬件I2C接口
http://blog.csdn.net/caogos/article/details/77892951
【龙芯1c库】封装模拟I2C接口和使用示例
http://blog.csdn.net/caogos/article/details/73089406
这几篇文章都是以“龙芯1C库”为背景的,而本文的不同之处在于重点讨论RTT统一标准的I2C接口,在龙芯1C上的移植和使用。
本函数的作用是,向RTT添加注册一个I2C总线。本函数为龙芯1C定制的函数,具体的实现细节放到后面移植部分再讨论。
直接调用一下就行。
有的BSP里面是使用
INIT_DEVICE_EXPORT(ls1c_i2c_init);
的形式调用的,但在龙芯1C上没有这样采用。原因是每个人使用I2C时,可能使用不同的引脚。
下面来详细看看第二个参数的结构体定义
rt_i2c_msg为RTT为I2C封装的抽象概念。一次发送或接收,单独用一个msg来表示。
比如要读取AT24C02上某个地址的数据,先要把该数据的地址“写入”(发送)给AT24C02,然后再读取数据。这里面包含了两个msg,首先是一个写的msg,然后是一个读的msg。
这是一个I2C的驱动,假设想再增加一个呢?道理类似,依葫芦画瓢,把scl和sda的引脚改一下,把I2C总线的名字改一下,基本就可以了。
最后在特别说明一下,目前龙芯的gpio没有开漏输出模式,所以在读取sda值的时候需要先设为输入模式。如下
在本文之前,已经写过几篇关于龙芯1C上,模拟I2C和硬件I2C,在裸机程序中和RTT中使用的文章,如下
【龙芯1c库】封装硬件I2C接口和使用示例
http://blog.csdn.net/caogos/article/details/77891546
在RT-Thread上使用龙芯1c库中的硬件I2C接口
http://blog.csdn.net/caogos/article/details/77892951
【龙芯1c库】封装模拟I2C接口和使用示例
http://blog.csdn.net/caogos/article/details/73089406
这几篇文章都是以“龙芯1C库”为背景的,而本文的不同之处在于重点讨论RTT统一标准的I2C接口,在龙芯1C上的移植和使用。
RTT统一的标准的I2C接口简介
初始化I2C
函数原型
int ls1c_i2c_init(void);
本函数的作用是,向RTT添加注册一个I2C总线。本函数为龙芯1C定制的函数,具体的实现细节放到后面移植部分再讨论。
使用示例
ls1c_i2c_init();
直接调用一下就行。
有的BSP里面是使用
INIT_DEVICE_EXPORT(ls1c_i2c_init);
的形式调用的,但在龙芯1C上没有这样采用。原因是每个人使用I2C时,可能使用不同的引脚。
Find设备
函数原型
/** * This function finds a device driver by specified name. * * @param name the device driver's name * * @return the registered device driver on successful, or RT_NULL on failure. */ rt_device_t rt_device_find(const char *name)函数rt_device_find()为RTT中通用的,find设备的函数。其它一些地方也可能会见到。入参为I2C总线的名字。I2C总线的名字在函数ls1c_i2c_init()中,调用函数rt_i2c_bit_add_bus()时注册的I2C总线名字。
使用示例
#define AT24C02_I2C_BUS_NAME ("i2c2")
struct rt_i2c_bus_device *at24c02_i2c_bus = RT_NULL;
// find设备
at24c02_i2c_bus = (struct rt_i2c_bus_device *)rt_device_find(AT24C02_I2C_BUS_NAME);
if (RT_NULL == at24c02_i2c_bus)
{
rt_kprintf("[%s] no i2c device -- am2320!\n", __FUNCTION__);
return ;
}
收发I2C信息
函数原型
rt_size_t rt_i2c_transfer(struct rt_i2c_bus_device *bus,
struct rt_i2c_msg msgs[],
rt_uint32_t num)本函数是I2C收发的核心函数。收发都是调用本函数。具体是收,还是发,第二个入参中有个flags来控制。第一个入参为I2C总线(前面已经使用函数rt_device_find()得到的I2C总线),第三个入参为msg的个数,注意要与第二个参数中的len区别。
下面来详细看看第二个参数的结构体定义
struct rt_i2c_msg
{
rt_uint16_t addr;
rt_uint16_t flags;
rt_uint16_t len;
rt_uint8_t *buf;
};addr为I2C从机的地址,flags为此msg的一些标志,比如用来标记该msg是向从机读数据,还是写数据。len为此msg中收发数据的长度,buf为此msg收发的具体数据。
rt_i2c_msg为RTT为I2C封装的抽象概念。一次发送或接收,单独用一个msg来表示。
比如要读取AT24C02上某个地址的数据,先要把该数据的地址“写入”(发送)给AT24C02,然后再读取数据。这里面包含了两个msg,首先是一个写的msg,然后是一个读的msg。
使用示例
向AT24C02指定地址写入指定数据
/*
* 在指定地址写入一个字节的数据
* @write_addr 地址
* @data 待写入的数据
*/
void at24c02_write_byte(unsigned char write_addr, unsigned char data)
{
struct rt_i2c_msg msg[1] = {0};
unsigned char buf[2] = {0};
buf[0] = write_addr;
buf[1] = data;
msg[0].addr = at24c02_addr;
msg[0].flags = RT_I2C_WR;
msg[0].buf = buf;
msg[0].len = 2;
rt_i2c_transfer(at24c02_i2c_bus, msg, 1);
return ;
}
从AT24C02指定地址读出数据
/*
* 从指定地址读出一个字节
* @read_addr 地址
*/
unsigned char at24c02_read_byte(unsigned char read_addr)
{
struct rt_i2c_msg msgs[2];
unsigned char data = 0;
msgs[0].addr = at24c02_addr;
msgs[0].flags = RT_I2C_WR;
msgs[0].buf = &read_addr;
msgs[0].len = 1;
msgs[1].addr = at24c02_addr;
msgs[1].flags = RT_I2C_RD;
msgs[1].buf = &data;
msgs[1].len = 1;
rt_i2c_transfer(at24c02_i2c_bus, msgs, 2);
return data;
}
综合应用示例——在龙芯1C上接I2C接口的EEPROM芯片AT24C02
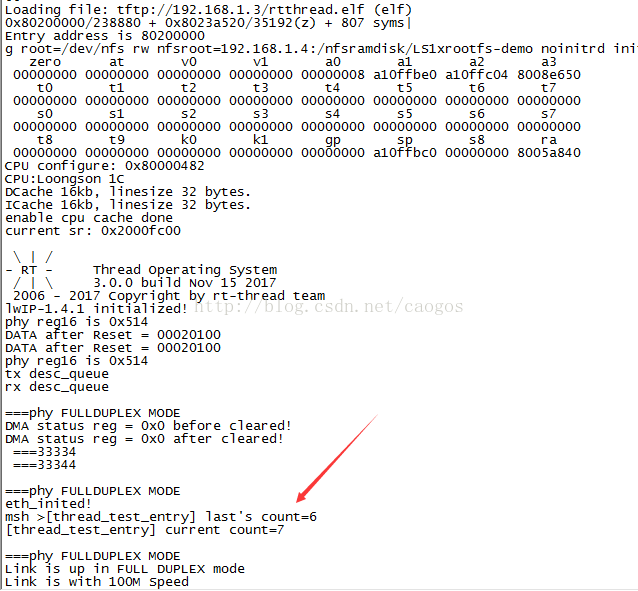
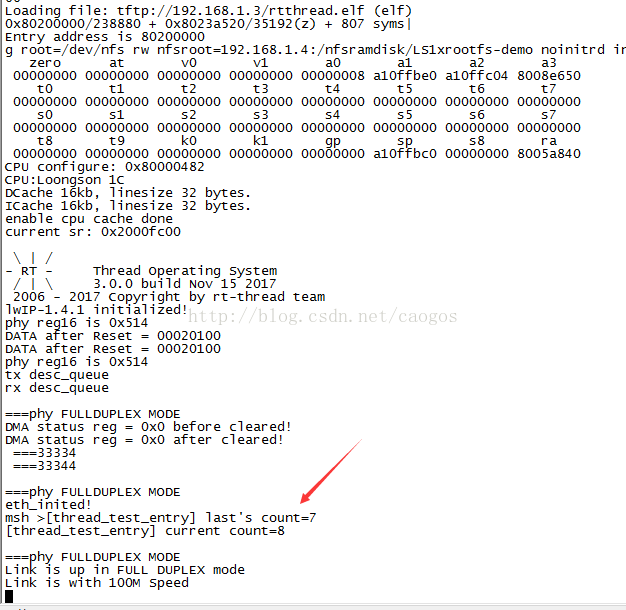
测试的思路是,在at24c02内,地址为1的地方保存复位次数。每次上电后,先读取当前次数,并打印,然后加一,并保存到at24c02中。为了验证保存正确,在读取一次,并将读取的结果打印出来。
实物图

电路连接为
AT24C02 龙芯1c
VCC ------------------- 3.3V
GND ------------------- GND
SCL ------------------- GPIO57
SDA ------------------ GPIO56
串口打印
测试源码清单
在前面介绍函数rt_i2c_transfer()时,已经把读写eeprom的函数介绍了,读写eeprom是本测试用例中的核心代码,这里就直接把完整的测试代码贴出来(I2C移植的部分代码稍后再讨论)。
application.c
bsp\ls1cdev\applications\application.c
/*
* File : application.c
* This file is part of RT-Thread RTOS
* COPYRIGHT (C) 2006-2012, RT-Thread Develop Team
*
* The license and distribution terms for this file may be
* found in the file LICENSE in this distribution or at
* http://www.rt-thread.org/license/LICENSE
*
* Change Logs:
* Date Author Notes
* 2010-06-25 Bernard first version
* 2011-08-08 lgnq modified for Loongson LS1B
* 2015-07-06 chinesebear modified for Loongson LS1C
*/
#include <rtthread.h>
#include "net/synopGMAC.h"
#include <lwip/api.h>
#include <drivers/i2c.h>
#include "../drivers/drv_i2c.h"
// 测试用的线程
#define THREAD_TEST_PRIORITY (25)
#define THREAD_TEST_STACK_SIZE (4*1024) // 4k
#define THREAD_TEST_TIMESLICE (10)
#define AT24C02_I2C_BUS_NAME ("i2c2") // 注意与i2c bus初始化函数中的bus name保持一致
struct rt_i2c_bus_device *at24c02_i2c_bus = RT_NULL;
int at24c02_addr = 0xA0 >> 1; // 地址前7位
struct rt_thread thread_test;
ALIGN(8) rt_uint8_t thread_test_stack[THREAD_TEST_STACK_SIZE];
/*
* 从指定地址读出一个字节
* @read_addr 地址
*/
unsigned char at24c02_read_byte(unsigned char read_addr)
{
struct rt_i2c_msg msgs[2];
unsigned char data = 0;
msgs[0].addr = at24c02_addr;
msgs[0].flags = RT_I2C_WR;
msgs[0].buf = &read_addr;
msgs[0].len = 1;
msgs[1].addr = at24c02_addr;
msgs[1].flags = RT_I2C_RD;
msgs[1].buf = &data;
msgs[1].len = 1;
rt_i2c_transfer(at24c02_i2c_bus, msgs, 2);
return data;
}
/*
* 在指定地址写入一个字节的数据
* @write_addr 地址
* @data 待写入的数据
*/
void at24c02_write_byte(unsigned char write_addr, unsigned char data)
{
struct rt_i2c_msg msg[1] = {0};
unsigned char buf[2] = {0};
buf[0] = write_addr;
buf[1] = data;
msg[0].addr = at24c02_addr;
msg[0].flags = RT_I2C_WR;
msg[0].buf = buf;
msg[0].len = 2;
rt_i2c_transfer(at24c02_i2c_bus, msg, 1);
return ;
}
// 测试用的线程的入口
void thread_test_entry(void *parameter)
{
unsigned char read_addr = 1; // 地址
unsigned char count = 0; // 用于计数的变量
// 初始化(添加i2c总线--i2c2)
ls1c_i2c_init();
// find设备
at24c02_i2c_bus = (struct rt_i2c_bus_device *)rt_device_find(AT24C02_I2C_BUS_NAME);
if (RT_NULL == at24c02_i2c_bus)
{
rt_kprintf("[%s] no i2c device -- am2320!\n", __FUNCTION__);
return ;
}
// 读
count = at24c02_read_byte(read_addr);
rt_kprintf("[%s] last's count=%u\n", __FUNCTION__, count);
// 加一,然后写
count++;
at24c02_write_byte(read_addr, count);
rt_thread_delay(6); // 一定要延时5ms以上
// 读
count = at24c02_read_byte(read_addr);
rt_kprintf("[%s] current count=%d\n", __FUNCTION__, count);
while (1)
{
// 间隔3s
rt_thread_delay(3 * RT_TICK_PER_SECOND);
}
}
void rt_init_thread_entry(void *parameter)
{
/* initialization RT-Thread Components */
rt_components_init();
// 网口EMAC初始化
rt_hw_eth_init();
}
int rt_application_init(void)
{
rt_thread_t tid;
rt_err_t result;
/* create initialization thread */
tid = rt_thread_create("init",
rt_init_thread_entry, RT_NULL,
4096, RT_THREAD_PRIORITY_MAX/3, 20);
if (tid != RT_NULL)
rt_thread_startup(tid);
// 初始化测试用的线程
result = rt_thread_init(&thread_test,
"thread_test",
thread_test_entry,
RT_NULL,
&thread_test_stack[0],
sizeof(thread_test_stack),
THREAD_TEST_PRIORITY,
THREAD_TEST_TIMESLICE);
if (RT_EOK == result)
{
rt_thread_startup(&thread_test);
}
else
{
return -1;
}
return 0;
}
把RTT统一的标准的I2C接口移植到龙芯1C上
移植要点
RTT支持硬件I2C和模拟I2C,这里使用的是模拟I2C。大家都知道,其实模拟I2C本身就不难,而RTT又把其中一些非硬件相关的,通用的部分提出来了,那么留给我们移植的工作量就更少了。简单来说就只需要实现读取和设置scl和sda的函数就可以了。对应代码为
static const struct rt_i2c_bit_ops bit_ops = {
.data = RT_NULL,
.set_sda = ls1c_set_sda,
.set_scl = ls1c_set_scl,
.get_sda = ls1c_get_sda,
.get_scl = ls1c_get_scl,
.udelay = ls1c_udelay,
.delay_us = 20, // 此值为周期(us)
.timeout = 10, // 单位为tick
};这个结构体中的函数都实现好后,然后调用函数rt_i2c_bit_add_bus()把bit_ops注册一下就可以了。具体代码为
int ls1c_i2c_init(void)
{
static struct rt_i2c_bus_device bus = {0};
bus.priv = (void *)&bit_ops;
ls1c_i2c_gpio_init();
rt_i2c_bit_add_bus(&bus, "i2c2");
return RT_EOK;
}
这是一个I2C的驱动,假设想再增加一个呢?道理类似,依葫芦画瓢,把scl和sda的引脚改一下,把I2C总线的名字改一下,基本就可以了。
最后在特别说明一下,目前龙芯的gpio没有开漏输出模式,所以在读取sda值的时候需要先设为输入模式。如下
static rt_int32_t ls1c_get_sda(void *data)
{
#ifdef LS1C_SET_GPIO_MODE
gpio_init(LS1C_I2C_SDA, gpio_mode_input);
ls1c_udelay(5);
#endif
return gpio_get(LS1C_I2C_SDA);
}
static void ls1c_set_sda(void *data, rt_int32_t state)
{
#ifdef LS1C_SET_GPIO_MODE
gpio_init(LS1C_I2C_SDA, gpio_mode_output);
ls1c_udelay(5);
#endif
gpio_set(LS1C_I2C_SDA, state);
return ;
}其中,对GPIO的操作还是使用的龙芯1C库中的gpio函数(bsp\ls1cdev\libraries\ls1c_gpio.h中)。
源码清单
drv_i2c.c
bsp\ls1cdev\drivers\drv_i2c.c
/*
* File : drv_i2c.c
* This file is part of RT-Thread RTOS
* COPYRIGHT (C) 2006 - 2012, RT-Thread Development Team
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License along
* with this program; if not, write to the Free Software Foundation, Inc.,
* 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
*
* Change Logs:
* Date Author Notes
* 2017-11-14 勤为本 first version
*/
#include <rtthread.h>
#include <drivers/i2c.h>
#include <drivers/i2c-bit-ops.h>
#include "drv_i2c.h"
#include "../libraries/ls1c_gpio.h"
#include "../libraries/ls1c_delay.h"
#define LS1C_I2C_SCL (57) // gpio57
#define LS1C_I2C_SDA (56) // gpio56
#define LS1C_SET_GPIO_MODE
static void ls1c_i2c_gpio_init(void)
{
gpio_init(LS1C_I2C_SCL, gpio_mode_output);
gpio_set(LS1C_I2C_SCL, gpio_level_high);
gpio_init(LS1C_I2C_SDA, gpio_mode_output);
gpio_set(LS1C_I2C_SDA, gpio_level_high);
return ;
}
static void ls1c_udelay(rt_uint32_t us)
{
delay_us((int)us);
}
static void ls1c_set_sda(void *data, rt_int32_t state)
{
#ifdef LS1C_SET_GPIO_MODE
gpio_init(LS1C_I2C_SDA, gpio_mode_output);
ls1c_udelay(5);
#endif
gpio_set(LS1C_I2C_SDA, state);
return ;
}
static void ls1c_set_scl(void *data, rt_int32_t state)
{
#ifdef LS1C_SET_GPIO_MODE
gpio_init(LS1C_I2C_SCL, gpio_mode_output);
ls1c_udelay(5);
#endif
gpio_set(LS1C_I2C_SCL, state);
return ;
}
static rt_int32_t ls1c_get_sda(void *data)
{
#ifdef LS1C_SET_GPIO_MODE
gpio_init(LS1C_I2C_SDA, gpio_mode_input);
ls1c_udelay(5);
#endif
return gpio_get(LS1C_I2C_SDA);
}
static rt_int32_t ls1c_get_scl(void *data)
{
#ifdef LS1C_SET_GPIO_MODE
gpio_init(LS1C_I2C_SCL, gpio_mode_input);
ls1c_udelay(5);
#endif
return gpio_get(LS1C_I2C_SCL);
}
static const struct rt_i2c_bit_ops bit_ops = {
.data = RT_NULL,
.set_sda = ls1c_set_sda,
.set_scl = ls1c_set_scl,
.get_sda = ls1c_get_sda,
.get_scl = ls1c_get_scl,
.udelay = ls1c_udelay,
.delay_us = 20, // 此值为周期(us)
.timeout = 10, // 单位为tick
};
int ls1c_i2c_init(void)
{
static struct rt_i2c_bus_device bus = {0};
bus.priv = (void *)&bit_ops;
ls1c_i2c_gpio_init();
rt_i2c_bit_add_bus(&bus, "i2c2");
return RT_EOK;
}
感谢阅读!