sparse reward
我们不知道行动是好是坏,大多数情况下,如果r = 0,那怎么解决呢?
例如,机器人手臂将螺栓固定在螺丝上,开发人员应该定义额外奖励来指导代理(reward shaping)。
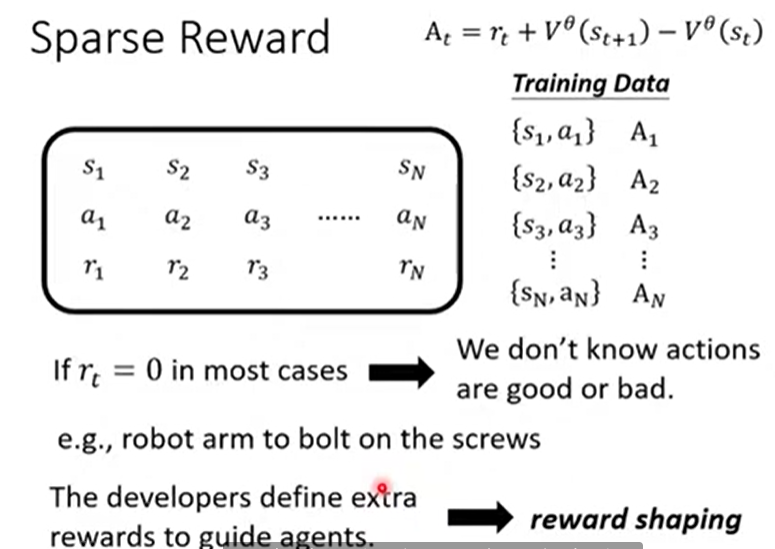

reward shaping需要有一定的领域知识。
当代理看到新的(但有意义的)东西时,获得额外的奖励。

no reward:learning from demonstration
动机
在某些任务中,即使是定义奖励也具有挑战性。手工制作的奖励会导致不受控制的行为。
没有reward的情况可以使用imitation learning
actor可以与环境互动,但奖励功能不可用。


在一些极端的情况下(expert没有遇到过),机器应该怎么做?
代理会复制每一个行为,甚至无关的动作。

Inverse Reinforcement Learning
逆向强化学习会根据expert来反推出奖励方程

简单的reward function不一定会学到简单的actor
假设老师的reward是最好的,但是也不说完全模仿老师。
原则:老师永远是最好的。
基本理念:初始化一个参与者actor,在每次迭代中,演员与环境交互以获得一些轨迹trajectories。
定义一个奖励函数,使教师的轨迹比参与者的轨迹更好。参与者学习根据新的奖励函数最大化奖励。输出奖励函数和从奖励函数中学习到的actor。


actor和GAN里面的generator很像,reward function和discriminator很像。

给机器画面学习: