文章目录
前言
APM 4.2.3
以ROVER为例进行阅读
如有疏漏或谬误,恳请指出
一个人可以走的更快,一群人才能走的更远
可加文章底部个人微信
一、update_receive
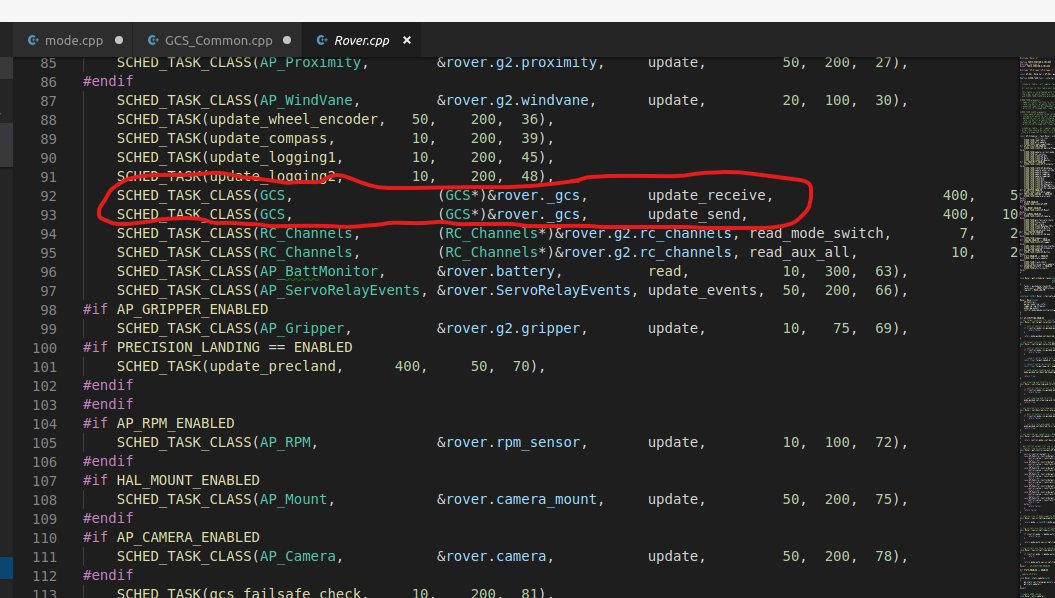
APM的MAVLINK包含收和发两个任务进行调度,本节先对接收部分进行讲解
如下,这里的rover._gcs是一个GCS_Rover对象,被转换为其父类GCS的指针,父类指针指向子类对象,实现多态
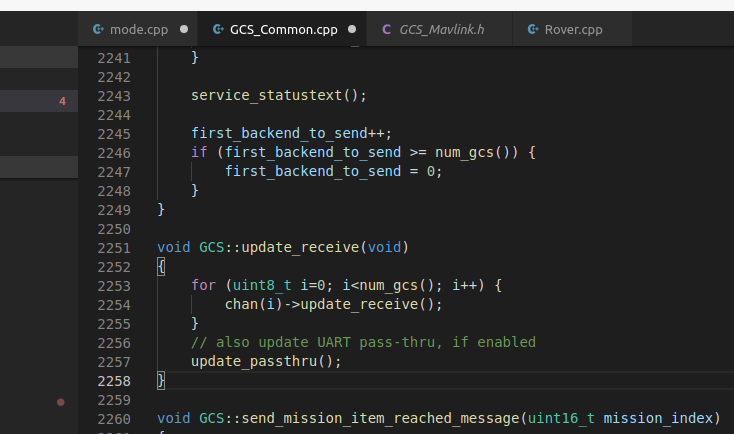
update_receive函数的定义如下:这里的chan是指针数组,里面相当于存放了不同的mavlink通道,例如和地面站通信的通道还有和机载电脑通信的通道。
前面的父类指针指向的是子类GCS_Rover的对象,所以这里的chan数组也是GCS_Rover中定义的,如下:
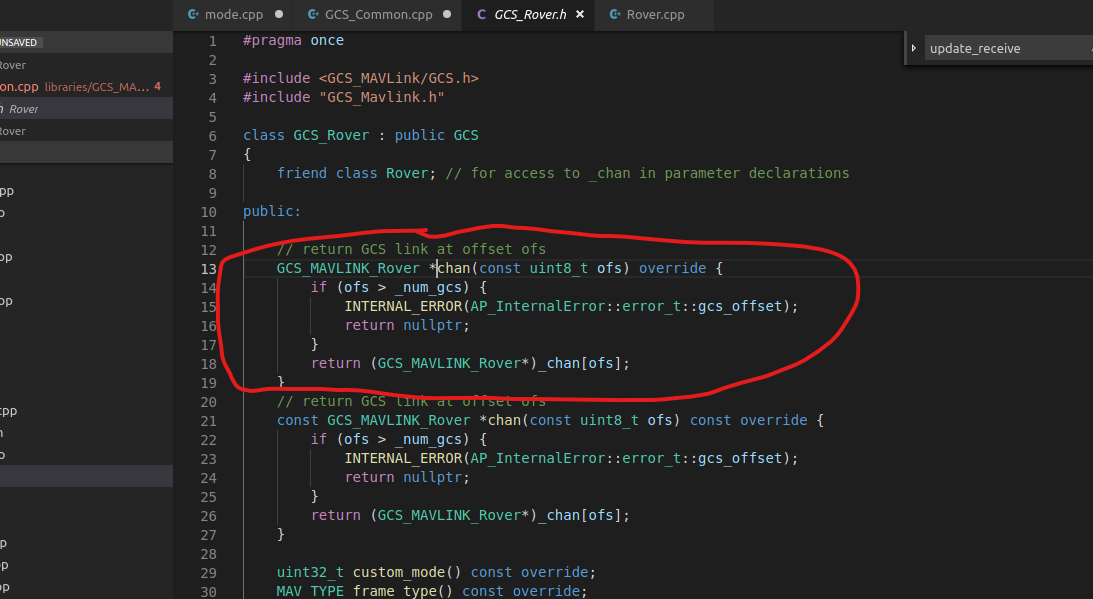
GCS_MAVLINK_Rover是GCS_MAVLINK的子类,其继承了GCS_MAVLINK的update_receive方法,因此chan(i)->update_receive();是调用了GCS_MAVLINK的update_receive方法,如下:
这个方法的作用就是读取通信端口的数据,并调用MAVLINK库函数的解包函数mavlink_parse_char进行解包,一旦一包数据解析完成,调用packetReceived来完成具体的数据处理逻辑
void
GCS_MAVLINK::update_receive(uint32_t max_time_us)
{
// do absolutely nothing if we are locked
if (locked()) {
return;
}
// receive new packets
mavlink_message_t msg;
mavlink_status_t status;
uint32_t tstart_us = AP_HAL::micros();
uint32_t now_ms = AP_HAL::millis();
status.packet_rx_drop_count = 0;
const uint16_t nbytes = _port->available();
for (uint16_t i=0; i<nbytes; i++)
{
const uint8_t c = (uint8_t)_port->read();
const uint32_t protocol_timeout = 4000;
if (alternative.handler &&
now_ms - alternative.last_mavlink_ms > protocol_timeout) {
/*
we have an alternative protocol handler installed and we
haven't parsed a MAVLink packet for 4 seconds. Try
parsing using alternative handler
*/
if (alternative.handler(c, mavlink_comm_port[chan])) {
alternative.last_alternate_ms = now_ms;
gcs_alternative_active[chan] = true;
}
/*
we may also try parsing as MAVLink if we haven't had a
successful parse on the alternative protocol for 4s
*/
if (now_ms - alternative.last_alternate_ms <= protocol_timeout) {
continue;
}
}
bool parsed_packet = false;
// Try to get a new message
if (mavlink_parse_char(chan, c, &msg, &status)) {
hal.util->persistent_data.last_mavlink_msgid = msg.msgid;
packetReceived(status, msg);
parsed_packet = true;
gcs_alternative_active[chan] = false;
alternative.last_mavlink_ms = now_ms;
hal.util->persistent_data.last_mavlink_msgid = 0;
}
if (parsed_packet || i % 100 == 0) {
// make sure we don't spend too much time parsing mavlink messages
if (AP_HAL::micros() - tstart_us > max_time_us) {
break;
}
}
}
const uint32_t tnow = AP_HAL::millis();
// send a timesync message every 10 seconds; this is for data
// collection purposes
if (tnow - _timesync_request.last_sent_ms > _timesync_request.interval_ms && !is_private()) {
if (HAVE_PAYLOAD_SPACE(chan, TIMESYNC)) {
send_timesync();
_timesync_request.last_sent_ms = tnow;
}
}
// consider logging mavlink stats:
if (is_active() || is_streaming()) {
if (tnow - last_mavlink_stats_logged > 1000) {
log_mavlink_stats();
last_mavlink_stats_logged = tnow;
}
}
}
packetReceived如下,主要对一些特殊的消息进行了处理,同时检查MAVLINk协议版本,如果收到MAVLINk2的数据,则将发送的数据也切成MAVLINk2协议。主要的数据处理逻辑在handleMessage(msg);中进行
void GCS_MAVLINK::packetReceived(const mavlink_status_t &status,
const mavlink_message_t &msg)
{
// we exclude radio packets because we historically used this to
// make it possible to use the CLI over the radio
if (msg.msgid != MAVLINK_MSG_ID_RADIO && msg.msgid != MAVLINK_MSG_ID_RADIO_STATUS) {
mavlink_active |= (1U<<(chan-MAVLINK_COMM_0));
}
const auto mavlink_protocol = uartstate->get_protocol();
if (!(status.flags & MAVLINK_STATUS_FLAG_IN_MAVLINK1) &&
(status.flags & MAVLINK_STATUS_FLAG_OUT_MAVLINK1) &&
(mavlink_protocol == AP_SerialManager::SerialProtocol_MAVLink2 ||
mavlink_protocol == AP_SerialManager::SerialProtocol_MAVLinkHL)) {
// if we receive any MAVLink2 packets on a connection
// currently sending MAVLink1 then switch to sending
// MAVLink2
mavlink_status_t *cstatus = mavlink_get_channel_status(chan);
if (cstatus != nullptr) {
cstatus->flags &= ~MAVLINK_STATUS_FLAG_OUT_MAVLINK1;
}
}
if (!routing.check_and_forward(chan, msg)) {
// the routing code has indicated we should not handle this packet locally
return;
}
if (msg.msgid == MAVLINK_MSG_ID_GLOBAL_POSITION_INT) {
#if HAL_MOUNT_ENABLED
// allow mounts to see the location of other vehicles
handle_mount_message(msg);
#endif
}
if (!accept_packet(status, msg)) {
// e.g. enforce-sysid says we shouldn't look at this packet
return;
}
handleMessage(msg);
}
二、handleMessage
handleMessage是GCS_MAVLINK的一个纯虚函数,在其子类GCS_MAVLINK_Rover中进行了覆盖,其定义如下:
在handleMessage首先对控制接口进行了处理,这些了控制接口主要是在guided模式下使用,一般是由机载电脑发送给飞控,在使用这些接口时需要注意掩码type_mask的设置。同时对电台消息也进行了处理。最后 通过handle_common_message(msg);对普通的消息进行处理。
void GCS_MAVLINK_Rover::handleMessage(const mavlink_message_t &msg)
{
switch (msg.msgid) {
case MAVLINK_MSG_ID_SET_ATTITUDE_TARGET:
handle_set_attitude_target(msg);
break;
case MAVLINK_MSG_ID_SET_POSITION_TARGET_LOCAL_NED:
handle_set_position_target_local_ned(msg);
break;
case MAVLINK_MSG_ID_SET_POSITION_TARGET_GLOBAL_INT:
handle_set_position_target_global_int(msg);
break;
case MAVLINK_MSG_ID_RADIO:
case MAVLINK_MSG_ID_RADIO_STATUS:
handle_radio(msg);
break;
default:
handle_common_message(msg);
break;
}
}
三、handle_common_message
除了上面的几个消息,剩下的所有的消息都在这个里面处理,每个消息(或几个消息)对应一个handle处理函数。到这个函数为止,MAVLINK的接收处理就完成了。
void GCS_MAVLINK::handle_common_message(const mavlink_message_t &msg)
{
switch (msg.msgid) {
case MAVLINK_MSG_ID_HEARTBEAT: {
handle_heartbeat(msg);
break;
}
case MAVLINK_MSG_ID_COMMAND_ACK: {
handle_command_ack(msg);
break;
}
case MAVLINK_MSG_ID_SETUP_SIGNING:
handle_setup_signing(msg);
break;
case MAVLINK_MSG_ID_PARAM_REQUEST_LIST:
case MAVLINK_MSG_ID_PARAM_SET:
case MAVLINK_MSG_ID_PARAM_REQUEST_READ:
handle_common_param_message(msg);
break;
case MAVLINK_MSG_ID_SET_GPS_GLOBAL_ORIGIN:
handle_set_gps_global_origin(msg);
break;
case MAVLINK_MSG_ID_DEVICE_OP_READ:
handle_device_op_read(msg);
break;
case MAVLINK_MSG_ID_DEVICE_OP_WRITE:
handle_device_op_write(msg);
break;
case MAVLINK_MSG_ID_TIMESYNC:
handle_timesync(msg);
break;
case MAVLINK_MSG_ID_LOG_REQUEST_LIST:
case MAVLINK_MSG_ID_LOG_REQUEST_DATA:
case MAVLINK_MSG_ID_LOG_ERASE:
case MAVLINK_MSG_ID_LOG_REQUEST_END:
case MAVLINK_MSG_ID_REMOTE_LOG_BLOCK_STATUS:
AP::logger().handle_mavlink_msg(*this, msg);
break;
case MAVLINK_MSG_ID_FILE_TRANSFER_PROTOCOL:
handle_file_transfer_protocol(msg);
break;
#if AP_CAMERA_ENABLED
case MAVLINK_MSG_ID_DIGICAM_CONTROL:
case MAVLINK_MSG_ID_GOPRO_HEARTBEAT: // heartbeat from a GoPro in Solo gimbal
{
AP_Camera *camera = AP::camera();
if (camera == nullptr) {
return;
}
camera->handle_message(chan, msg);
}
break;
#endif
case MAVLINK_MSG_ID_SET_MODE:
handle_set_mode(msg);
break;
case MAVLINK_MSG_ID_AUTOPILOT_VERSION_REQUEST:
handle_send_autopilot_version(msg);
break;
case MAVLINK_MSG_ID_MISSION_WRITE_PARTIAL_LIST:
case MAVLINK_MSG_ID_MISSION_REQUEST_LIST:
case MAVLINK_MSG_ID_MISSION_COUNT:
case MAVLINK_MSG_ID_MISSION_CLEAR_ALL:
case MAVLINK_MSG_ID_MISSION_ITEM:
case MAVLINK_MSG_ID_MISSION_ITEM_INT:
case MAVLINK_MSG_ID_MISSION_REQUEST_INT:
case MAVLINK_MSG_ID_MISSION_REQUEST:
case MAVLINK_MSG_ID_MISSION_ACK:
case MAVLINK_MSG_ID_MISSION_SET_CURRENT:
handle_common_mission_message(msg);
break;
case MAVLINK_MSG_ID_COMMAND_LONG:
handle_command_long(msg);
break;
case MAVLINK_MSG_ID_COMMAND_INT:
handle_command_int(msg);
break;
case MAVLINK_MSG_ID_FENCE_POINT:
case MAVLINK_MSG_ID_FENCE_FETCH_POINT:
handle_fence_message(msg);
break;
#if HAL_MOUNT_ENABLED
case MAVLINK_MSG_ID_MOUNT_CONFIGURE: // deprecated. Use MAV_CMD_DO_MOUNT_CONFIGURE
send_received_message_deprecation_warning("MOUNT_CONFIGURE");
handle_mount_message(msg);
break;
case MAVLINK_MSG_ID_MOUNT_CONTROL: // deprecated. Use MAV_CMD_DO_MOUNT_CONTROL
send_received_message_deprecation_warning("MOUNT_CONTROL");
handle_mount_message(msg);
break;
case MAVLINK_MSG_ID_GIMBAL_REPORT:
case MAVLINK_MSG_ID_GIMBAL_DEVICE_INFORMATION:
case MAVLINK_MSG_ID_GIMBAL_DEVICE_ATTITUDE_STATUS:
handle_mount_message(msg);
break;
#endif
case MAVLINK_MSG_ID_PARAM_VALUE:
handle_param_value(msg);
break;
case MAVLINK_MSG_ID_SERIAL_CONTROL:
handle_serial_control(msg);
break;
case MAVLINK_MSG_ID_GPS_RTCM_DATA:
case MAVLINK_MSG_ID_GPS_INPUT:
case MAVLINK_MSG_ID_HIL_GPS:
case MAVLINK_MSG_ID_GPS_INJECT_DATA:
AP::gps().handle_msg(msg);
break;
case MAVLINK_MSG_ID_STATUSTEXT:
handle_statustext(msg);
break;
#if AP_NOTIFY_MAVLINK_LED_CONTROL_SUPPORT_ENABLED
case MAVLINK_MSG_ID_LED_CONTROL:
// send message to Notify
AP_Notify::handle_led_control(msg);
break;
#endif
case MAVLINK_MSG_ID_MANUAL_CONTROL:
handle_manual_control(msg);
break;
#if AP_NOTIFY_MAVLINK_PLAY_TUNE_SUPPORT_ENABLED
case MAVLINK_MSG_ID_PLAY_TUNE:
// send message to Notify
AP_Notify::handle_play_tune(msg);
break;
#endif
#if HAL_RALLY_ENABLED
case MAVLINK_MSG_ID_RALLY_POINT:
case MAVLINK_MSG_ID_RALLY_FETCH_POINT:
handle_common_rally_message(msg);
break;
#endif
case MAVLINK_MSG_ID_REQUEST_DATA_STREAM:
// only pass if override is not selected
if (!(_port->get_options() & _port->OPTION_NOSTREAMOVERRIDE)) {
handle_request_data_stream(msg);
}
break;
case MAVLINK_MSG_ID_DATA96:
handle_data_packet(msg);
break;
#if HAL_VISUALODOM_ENABLED
case MAVLINK_MSG_ID_VISION_POSITION_DELTA:
handle_vision_position_delta(msg);
break;
case MAVLINK_MSG_ID_VISION_POSITION_ESTIMATE:
handle_vision_position_estimate(msg);
break;
case MAVLINK_MSG_ID_GLOBAL_VISION_POSITION_ESTIMATE:
handle_global_vision_position_estimate(msg);
break;
case MAVLINK_MSG_ID_VICON_POSITION_ESTIMATE:
handle_vicon_position_estimate(msg);
break;
case MAVLINK_MSG_ID_ODOMETRY:
handle_odometry(msg);
break;
case MAVLINK_MSG_ID_ATT_POS_MOCAP:
handle_att_pos_mocap(msg);
break;
case MAVLINK_MSG_ID_VISION_SPEED_ESTIMATE:
handle_vision_speed_estimate(msg);
break;
#endif // HAL_VISUALODOM_ENABLED
case MAVLINK_MSG_ID_SYSTEM_TIME:
handle_system_time_message(msg);
break;
case MAVLINK_MSG_ID_RC_CHANNELS_OVERRIDE:
handle_rc_channels_override(msg);
break;
#if AP_OPTICALFLOW_ENABLED
case MAVLINK_MSG_ID_OPTICAL_FLOW:
handle_optical_flow(msg);
break;
#endif
case MAVLINK_MSG_ID_DISTANCE_SENSOR:
handle_distance_sensor(msg);
break;
case MAVLINK_MSG_ID_OBSTACLE_DISTANCE:
handle_obstacle_distance(msg);
break;
case MAVLINK_MSG_ID_OBSTACLE_DISTANCE_3D:
handle_obstacle_distance_3d(msg);
break;
case MAVLINK_MSG_ID_OSD_PARAM_CONFIG:
case MAVLINK_MSG_ID_OSD_PARAM_SHOW_CONFIG:
handle_osd_param_config(msg);
break;
case MAVLINK_MSG_ID_ADSB_VEHICLE:
case MAVLINK_MSG_ID_UAVIONIX_ADSB_OUT_CFG:
case MAVLINK_MSG_ID_UAVIONIX_ADSB_OUT_DYNAMIC:
case MAVLINK_MSG_ID_UAVIONIX_ADSB_TRANSCEIVER_HEALTH_REPORT:
case MAVLINK_MSG_ID_UAVIONIX_ADSB_OUT_CONTROL:
handle_adsb_message(msg);
break;
case MAVLINK_MSG_ID_LANDING_TARGET:
handle_landing_target(msg);
break;
case MAVLINK_MSG_ID_NAMED_VALUE_FLOAT:
handle_named_value(msg);
break;
case MAVLINK_MSG_ID_CAN_FRAME:
case MAVLINK_MSG_ID_CANFD_FRAME:
handle_can_frame(msg);
break;
case MAVLINK_MSG_ID_CAN_FILTER_MODIFY:
#if HAL_CANMANAGER_ENABLED
AP::can().handle_can_filter_modify(msg);
#endif
break;
#if AP_OPENDRONEID_ENABLED
case MAVLINK_MSG_ID_OPEN_DRONE_ID_ARM_STATUS:
case MAVLINK_MSG_ID_OPEN_DRONE_ID_OPERATOR_ID:
case MAVLINK_MSG_ID_OPEN_DRONE_ID_SELF_ID:
case MAVLINK_MSG_ID_OPEN_DRONE_ID_BASIC_ID:
case MAVLINK_MSG_ID_OPEN_DRONE_ID_SYSTEM:
case MAVLINK_MSG_ID_OPEN_DRONE_ID_SYSTEM_UPDATE:
AP::opendroneid().handle_msg(chan, msg);
break;
#endif
#if AP_SIGNED_FIRMWARE
case MAVLINK_MSG_ID_SECURE_COMMAND:
case MAVLINK_MSG_ID_SECURE_COMMAND_REPLY:
AP_CheckFirmware::handle_msg(chan, msg);
break;
#endif
}
四、update_send
MAVLINK发送的消息可分为两类,一类是应答式,包含任务航点、集结点和电子围栏的应答消息。这类消息只有在收到特定消息的情况下才会发送。还有一类就是固定频率进行发送的。
在下面的代码中,应答式消息通过指针数组missionitemprotocols分别对三种应答式消息进行轮询发送,prot->update()的定义在下面列出。
chan(i)->update_send()就是对各个mavlink通道的消息进行发送的程序,这个函数比较重要,也将在下面讲解。
void GCS::update_send()
{
update_send_has_been_called = true;
if (!initialised_missionitemprotocol_objects) {
initialised_missionitemprotocol_objects = true;
// once-only initialisation of MissionItemProtocol objects:
#if AP_MISSION_ENABLED
AP_Mission *mission = AP::mission();
if (mission != nullptr) {
missionitemprotocols[MAV_MISSION_TYPE_MISSION] = new MissionItemProtocol_Waypoints(*mission);
}
#endif
#if HAL_RALLY_ENABLED
AP_Rally *rally = AP::rally();
if (rally != nullptr) {
missionitemprotocols[MAV_MISSION_TYPE_RALLY] = new MissionItemProtocol_Rally(*rally);
}
#endif
#if AP_FENCE_ENABLED
AC_Fence *fence = AP::fence();
if (fence != nullptr) {
missionitemprotocols[MAV_MISSION_TYPE_FENCE] = new MissionItemProtocol_Fence(*fence);
}
#endif
}
for (auto *prot : missionitemprotocols) {
if (prot == nullptr) {
continue;
}
prot->update();
}
// round-robin the GCS_MAVLINK backend that gets to go first so
// one backend doesn't monopolise all of the time allowed for sending
// messages
for (uint8_t i=first_backend_to_send; i<num_gcs(); i++) {
chan(i)->update_send();
}
for (uint8_t i=0; i<first_backend_to_send; i++) {
chan(i)->update_send();
}
service_statustext();
first_backend_to_send++;
if (first_backend_to_send >= num_gcs()) {
first_backend_to_send = 0;
}
}
MissionItemProtocol::update()
这个方法用于发送应答消息,未收到数据或者未建立链接不应答,如果接收航电超时,则停止发送停止接收消息。否则的话通过send_message方法发送请求航点消息(传输航点时,飞控请求后地面站才会发下一个点,具体参考MAVLINk手册https://mavlink.io/en/services/mission.html)
void MissionItemProtocol::update()
{
if (!receiving) {
// we don't need to do anything unless we're sending requests
return;
}
if (link == nullptr) {
INTERNAL_ERROR(AP_InternalError::error_t::gcs_bad_missionprotocol_link);
return;
}
// stop waypoint receiving if timeout
const uint32_t tnow = AP_HAL::millis();
if (tnow - timelast_receive_ms > upload_timeout_ms) {
receiving = false;
timeout();
const mavlink_channel_t chan = link->get_chan();
if (HAVE_PAYLOAD_SPACE(chan, MISSION_ACK)) {
mavlink_msg_mission_ack_send(chan,
dest_sysid,
dest_compid,
MAV_MISSION_OPERATION_CANCELLED,
mission_type());
}
link = nullptr;
free_upload_resources();
return;
}
// resend request if we haven't gotten one:
const uint32_t wp_recv_timeout_ms = 1000U + link->get_stream_slowdown_ms();
if (tnow - timelast_request_ms > wp_recv_timeout_ms) {
timelast_request_ms = tnow;
link->send_message(next_item_ap_message_id());
}
}
send_message方法的定义如下:
这个方法就是把要发送的消息的id通过pushed_ap_message_ids.set添加要发送的队列中,在下面的程序中通过相应的mavlink通道进行获取并发送。
void GCS_MAVLINK::send_message(enum ap_message id)
{
if (id == MSG_HEARTBEAT || id == MSG_HIGH_LATENCY2) {
save_signing_timestamp(false);
// update the mask of all streaming channels
if (is_streaming()) {
GCS_MAVLINK::chan_is_streaming |= (1U<<(chan-MAVLINK_COMM_0));
} else {
GCS_MAVLINK::chan_is_streaming &= ~(1U<<(chan-MAVLINK_COMM_0));
}
}
pushed_ap_message_ids.set(id);
}
GCS_MAVLINK::update_send()
初始化等操作
void GCS_MAVLINK::update_send()
{
#if !defined(HAL_BUILD_AP_PERIPH) || HAL_LOGGING_ENABLED
if (!hal.scheduler->in_delay_callback()) {
// AP_Logger will not send log data if we are armed.
AP::logger().handle_log_send();
}
#endif
send_ftp_replies();
if (!deferred_messages_initialised) {
initialise_message_intervals_from_streamrates();
#if HAL_MAVLINK_INTERVALS_FROM_FILES_ENABLED
initialise_message_intervals_from_config_files();
#endif
deferred_messages_initialised = true;
}
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
uint32_t retry_deferred_body_start = AP_HAL::micros();
#endif
mavlink发送的最小时间间隔为5ms
const uint32_t start = AP_HAL::millis();
const uint16_t start16 = start & 0xFFFF;
while (AP_HAL::millis() - start < 5) {
// spend a max of 5ms sending messages. This should never trigger - out_of_time() should become true
if (gcs().out_of_time()) {
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
try_send_message_stats.out_of_time++;
#endif
break;
}
这里处理的是定时发送的消息,通过deferred_message_to_send_index获取id
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
retry_deferred_body_start = AP_HAL::micros();
#endif
// check if any "specially handled" messages should be sent out
{
const int8_t next = deferred_message_to_send_index(start16);
if (next != -1) {
if (!do_try_send_message(deferred_message[next].id)) {
break;
}
// we try to keep output on a regular clock to avoid
// user support questions:
const uint16_t interval_ms = deferred_message[next].interval_ms;
deferred_message[next].last_sent_ms += interval_ms;
// but we do not want to try to catch up too much:
if (uint16_t(start16 - deferred_message[next].last_sent_ms) > interval_ms) {
deferred_message[next].last_sent_ms = start16;
}
next_deferred_message_to_send_cache = -1; // deferred_message_to_send will recalculate
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
const uint32_t stop = AP_HAL::micros();
const uint32_t delta = stop - retry_deferred_body_start;
if (delta > try_send_message_stats.max_retry_deferred_body_us) {
try_send_message_stats.max_retry_deferred_body_us = delta;
try_send_message_stats.max_retry_deferred_body_type = 1;
}
#endif
continue;
}
}
这里处理的是上面的应答式消息,通过pushed_ap_message_ids.first_set()获取id
// check for any messages that the code has explicitly sent
const int16_t fs = pushed_ap_message_ids.first_set();
if (fs != -1) {
ap_message next = (ap_message)fs;
if (!do_try_send_message(next)) {
break;
}
pushed_ap_message_ids.clear(next);
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
const uint32_t stop = AP_HAL::micros();
const uint32_t delta = stop - retry_deferred_body_start;
if (delta > try_send_message_stats.max_retry_deferred_body_us) {
try_send_message_stats.max_retry_deferred_body_us = delta;
try_send_message_stats.max_retry_deferred_body_type = 2;
}
#endif
continue;
}
这里发送的消息会考虑剩余的发送缓冲区大小,从而动态调整发送间隔
ap_message next = next_deferred_bucket_message_to_send(start16);
if (next != no_message_to_send) {
if (!do_try_send_message(next)) {
break;
}
bucket_message_ids_to_send.clear(next);
if (bucket_message_ids_to_send.count() == 0) {
// we sent everything in the bucket. Reschedule it.
// we try to keep output on a regular clock to avoid
// user support questions:
const uint16_t interval_ms = get_reschedule_interval_ms(deferred_message_bucket[sending_bucket_id]);
deferred_message_bucket[sending_bucket_id].last_sent_ms += interval_ms;
// but we do not want to try to catch up too much:
if (uint16_t(start16 - deferred_message_bucket[sending_bucket_id].last_sent_ms) > interval_ms) {
deferred_message_bucket[sending_bucket_id].last_sent_ms = start16;
}
find_next_bucket_to_send(start16);
}
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
const uint32_t stop = AP_HAL::micros();
const uint32_t delta = stop - retry_deferred_body_start;
if (delta > try_send_message_stats.max_retry_deferred_body_us) {
try_send_message_stats.max_retry_deferred_body_us = delta;
try_send_message_stats.max_retry_deferred_body_type = 3;
}
#endif
continue;
}
break;
}
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
const uint32_t stop = AP_HAL::micros();
const uint32_t delta = stop - retry_deferred_body_start;
if (delta > try_send_message_stats.max_retry_deferred_body_us) {
try_send_message_stats.max_retry_deferred_body_us = delta;
try_send_message_stats.max_retry_deferred_body_type = 4;
}
#endif
// update the number of packets transmitted base on seqno, making
// the assumption that we don't send more than 256 messages
// between the last pass through here
mavlink_status_t *status = mavlink_get_channel_status(chan);
if (status != nullptr) {
send_packet_count += uint8_t(status->current_tx_seq - last_tx_seq);
last_tx_seq = status->current_tx_seq;
}
}
上面都是通过do_try_send_message方法进行消息的发送的,其定义如下:这个里卖主要是调用了try_send_message消息进行发送
bool GCS_MAVLINK::do_try_send_message(const ap_message id)
{
const bool in_delay_callback = hal.scheduler->in_delay_callback();
if (in_delay_callback && !should_send_message_in_delay_callback(id)) {
return true;
}
if (telemetry_delayed()) {
return false;
}
WITH_SEMAPHORE(comm_chan_lock(chan));
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
void *data = hal.scheduler->disable_interrupts_save();
uint32_t start_send_message_us = AP_HAL::micros();
#endif
if (!try_send_message(id)) {
// didn't fit in buffer...
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
try_send_message_stats.no_space_for_message++;
hal.scheduler->restore_interrupts(data);
#endif
return false;
}
#if GCS_DEBUG_SEND_MESSAGE_TIMINGS
const uint32_t delta_us = AP_HAL::micros() - start_send_message_us;
hal.scheduler->restore_interrupts(data);
if (delta_us > try_send_message_stats.longest_time_us) {
try_send_message_stats.longest_time_us = delta_us;
try_send_message_stats.longest_id = id;
}
#endif
return true;
}
try_send_message方法会根据id调用相应的MAVLINK打包函数,对消息进行打包发送,以send_attitude为例分析
bool GCS_MAVLINK::try_send_message(const enum ap_message id)
{
bool ret = true;
switch(id) {
case MSG_ATTITUDE:
CHECK_PAYLOAD_SIZE(ATTITUDE);
send_attitude();
break;
case MSG_ATTITUDE_QUATERNION:
CHECK_PAYLOAD_SIZE(ATTITUDE_QUATERNION);
send_attitude_quaternion();
break;
case MSG_NEXT_PARAM:
CHECK_PAYLOAD_SIZE(PARAM_VALUE);
queued_param_send();
break;
case MSG_HEARTBEAT:
CHECK_PAYLOAD_SIZE(HEARTBEAT);
last_heartbeat_time = AP_HAL::millis();
send_heartbeat();
break;
case MSG_HWSTATUS:
CHECK_PAYLOAD_SIZE(HWSTATUS);
send_hwstatus();
break;
case MSG_LOCATION:
CHECK_PAYLOAD_SIZE(GLOBAL_POSITION_INT);
send_global_position_int();
break;
case MSG_HOME:
CHECK_PAYLOAD_SIZE(HOME_POSITION);
send_home_position();
break;
case MSG_ORIGIN:
CHECK_PAYLOAD_SIZE(GPS_GLOBAL_ORIGIN);
send_gps_global_origin();
break;
#if AP_RPM_ENABLED
case MSG_RPM:
CHECK_PAYLOAD_SIZE(RPM);
send_rpm();
break;
#endif
case MSG_CURRENT_WAYPOINT:
case MSG_MISSION_ITEM_REACHED:
case MSG_NEXT_MISSION_REQUEST_WAYPOINTS:
case MSG_NEXT_MISSION_REQUEST_RALLY:
case MSG_NEXT_MISSION_REQUEST_FENCE:
ret = try_send_mission_message(id);
break;
#if COMPASS_CAL_ENABLED
case MSG_MAG_CAL_PROGRESS:
ret = AP::compass().send_mag_cal_progress(*this);
break;
case MSG_MAG_CAL_REPORT:
ret = AP::compass().send_mag_cal_report(*this);
break;
#endif
case MSG_BATTERY_STATUS:
send_battery_status();
break;
#if AP_MAVLINK_BATTERY2_ENABLED
case MSG_BATTERY2:
CHECK_PAYLOAD_SIZE(BATTERY2);
send_battery2();
break;
#endif
case MSG_EKF_STATUS_REPORT:
CHECK_PAYLOAD_SIZE(EKF_STATUS_REPORT);
AP::ahrs().send_ekf_status_report(*this);
break;
case MSG_MEMINFO:
CHECK_PAYLOAD_SIZE(MEMINFO);
send_meminfo();
break;
case MSG_FENCE_STATUS:
CHECK_PAYLOAD_SIZE(FENCE_STATUS);
send_fence_status();
break;
case MSG_RANGEFINDER:
CHECK_PAYLOAD_SIZE(RANGEFINDER);
send_rangefinder();
break;
case MSG_DISTANCE_SENSOR:
send_distance_sensor();
break;
#if AP_CAMERA_ENABLED
case MSG_CAMERA_FEEDBACK:
{
AP_Camera *camera = AP::camera();
if (camera == nullptr) {
break;
}
CHECK_PAYLOAD_SIZE(CAMERA_FEEDBACK);
camera->send_feedback(chan);
}
break;
#endif
case MSG_SYSTEM_TIME:
CHECK_PAYLOAD_SIZE(SYSTEM_TIME);
send_system_time();
break;
case MSG_GPS_RAW:
CHECK_PAYLOAD_SIZE(GPS_RAW_INT);
AP::gps().send_mavlink_gps_raw(chan);
break;
case MSG_GPS_RTK:
CHECK_PAYLOAD_SIZE(GPS_RTK);
AP::gps().send_mavlink_gps_rtk(chan, 0);
break;
case MSG_GPS2_RAW:
#if GPS_MAX_RECEIVERS > 1
CHECK_PAYLOAD_SIZE(GPS2_RAW);
AP::gps().send_mavlink_gps2_raw(chan);
#endif
break;
case MSG_GPS2_RTK:
#if GPS_MAX_RECEIVERS > 1
CHECK_PAYLOAD_SIZE(GPS2_RTK);
AP::gps().send_mavlink_gps_rtk(chan, 1);
#endif
break;
case MSG_LOCAL_POSITION:
CHECK_PAYLOAD_SIZE(LOCAL_POSITION_NED);
send_local_position();
break;
case MSG_GIMBAL_DEVICE_ATTITUDE_STATUS:
#if HAL_MOUNT_ENABLED
CHECK_PAYLOAD_SIZE(GIMBAL_DEVICE_ATTITUDE_STATUS);
send_gimbal_device_attitude_status();
#endif
break;
case MSG_AUTOPILOT_STATE_FOR_GIMBAL_DEVICE:
#if HAL_MOUNT_ENABLED
CHECK_PAYLOAD_SIZE(AUTOPILOT_STATE_FOR_GIMBAL_DEVICE);
send_autopilot_state_for_gimbal_device();
#endif
break;
case MSG_OPTICAL_FLOW:
#if AP_OPTICALFLOW_ENABLED
CHECK_PAYLOAD_SIZE(OPTICAL_FLOW);
send_opticalflow();
#endif
break;
case MSG_ATTITUDE_TARGET:
CHECK_PAYLOAD_SIZE(ATTITUDE_TARGET);
send_attitude_target();
break;
case MSG_POSITION_TARGET_GLOBAL_INT:
CHECK_PAYLOAD_SIZE(POSITION_TARGET_GLOBAL_INT);
send_position_target_global_int();
break;
case MSG_POSITION_TARGET_LOCAL_NED:
CHECK_PAYLOAD_SIZE(POSITION_TARGET_LOCAL_NED);
send_position_target_local_ned();
break;
case MSG_POWER_STATUS:
CHECK_PAYLOAD_SIZE(POWER_STATUS);
send_power_status();
break;
case MSG_MCU_STATUS:
#if HAL_WITH_MCU_MONITORING
CHECK_PAYLOAD_SIZE(MCU_STATUS);
send_mcu_status();
#endif
break;
case MSG_RC_CHANNELS:
CHECK_PAYLOAD_SIZE(RC_CHANNELS);
send_rc_channels();
break;
case MSG_RC_CHANNELS_RAW:
CHECK_PAYLOAD_SIZE(RC_CHANNELS_RAW);
send_rc_channels_raw();
break;
case MSG_RAW_IMU:
CHECK_PAYLOAD_SIZE(RAW_IMU);
send_raw_imu();
break;
case MSG_SCALED_IMU:
CHECK_PAYLOAD_SIZE(SCALED_IMU);
send_scaled_imu(0, mavlink_msg_scaled_imu_send);
break;
case MSG_SCALED_IMU2:
CHECK_PAYLOAD_SIZE(SCALED_IMU2);
send_scaled_imu(1, mavlink_msg_scaled_imu2_send);
break;
case MSG_SCALED_IMU3:
CHECK_PAYLOAD_SIZE(SCALED_IMU3);
send_scaled_imu(2, mavlink_msg_scaled_imu3_send);
break;
case MSG_SCALED_PRESSURE:
CHECK_PAYLOAD_SIZE(SCALED_PRESSURE);
send_scaled_pressure();
break;
case MSG_SCALED_PRESSURE2:
CHECK_PAYLOAD_SIZE(SCALED_PRESSURE2);
send_scaled_pressure2();
break;
case MSG_SCALED_PRESSURE3:
CHECK_PAYLOAD_SIZE(SCALED_PRESSURE3);
send_scaled_pressure3();
break;
case MSG_SERVO_OUTPUT_RAW:
CHECK_PAYLOAD_SIZE(SERVO_OUTPUT_RAW);
send_servo_output_raw();
break;
case MSG_SIMSTATE:
#if AP_SIM_ENABLED
CHECK_PAYLOAD_SIZE(SIMSTATE);
send_simstate();
#endif
break;
case MSG_SIM_STATE:
#if AP_SIM_ENABLED
CHECK_PAYLOAD_SIZE(SIM_STATE);
send_sim_state();
#endif
break;
case MSG_SYS_STATUS:
CHECK_PAYLOAD_SIZE(SYS_STATUS);
send_sys_status();
break;
case MSG_AHRS2:
CHECK_PAYLOAD_SIZE(AHRS2);
send_ahrs2();
break;
case MSG_PID_TUNING:
CHECK_PAYLOAD_SIZE(PID_TUNING);
send_pid_tuning();
break;
case MSG_NAV_CONTROLLER_OUTPUT:
CHECK_PAYLOAD_SIZE(NAV_CONTROLLER_OUTPUT);
send_nav_controller_output();
break;
case MSG_AHRS:
CHECK_PAYLOAD_SIZE(AHRS);
send_ahrs();
break;
case MSG_EXTENDED_SYS_STATE:
CHECK_PAYLOAD_SIZE(EXTENDED_SYS_STATE);
send_extended_sys_state();
break;
case MSG_VFR_HUD:
CHECK_PAYLOAD_SIZE(VFR_HUD);
send_vfr_hud();
break;
case MSG_VIBRATION:
CHECK_PAYLOAD_SIZE(VIBRATION);
send_vibration();
break;
case MSG_GENERATOR_STATUS:
#if HAL_GENERATOR_ENABLED
CHECK_PAYLOAD_SIZE(GENERATOR_STATUS);
send_generator_status();
#endif
break;
case MSG_AUTOPILOT_VERSION:
CHECK_PAYLOAD_SIZE(AUTOPILOT_VERSION);
send_autopilot_version();
break;
case MSG_ESC_TELEMETRY:
#if HAL_WITH_ESC_TELEM
AP::esc_telem().send_esc_telemetry_mavlink(uint8_t(chan));
#endif
break;
case MSG_EFI_STATUS: {
#if HAL_EFI_ENABLED
CHECK_PAYLOAD_SIZE(EFI_STATUS);
AP_EFI *efi = AP::EFI();
if (efi) {
efi->send_mavlink_status(chan);
}
#endif
break;
}
case MSG_WINCH_STATUS:
CHECK_PAYLOAD_SIZE(WINCH_STATUS);
send_winch_status();
break;
case MSG_WATER_DEPTH:
#if 9APM_BUILD_TYPE(APM_BUILD_Rover)
CHECK_PAYLOAD_SIZE(WATER_DEPTH);
send_water_depth();
#endif
break;
case MSG_HIGH_LATENCY2:
#if HAL_HIGH_LATENCY2_ENABLED
CHECK_PAYLOAD_SIZE(HIGH_LATENCY2);
send_high_latency2();
#endif // HAL_HIGH_LATENCY2_ENABLED
break;
case MSG_AIS_VESSEL: {
#if AP_AIS_ENABLED
AP_AIS *ais = AP_AIS::get_singleton();
if (ais) {
ais->send(chan);
}
#endif
break;
}
case MSG_UAVIONIX_ADSB_OUT_STATUS:
#if HAL_ADSB_ENABLED
CHECK_PAYLOAD_SIZE(UAVIONIX_ADSB_OUT_STATUS);
send_uavionix_adsb_out_status();
#endif
break;
default:
// try_send_message must always at some stage return true for
// a message, or we will attempt to infinitely retry the
// message as part of send_message.
// This message will be sent out at the same rate as the
// unknown message, so should be safe.
gcs().send_text(MAV_SEVERITY_DEBUG, "Sending unknown message (%u)", id);
#if CONFIG_HAL_BOARD == HAL_BOARD_SITL
AP_HAL::panic("Sending unknown ap_message %u", id);
#endif
break;
}
return ret;
}
send_attitude的定义如下:就是获取姿态数据,然后调用mavlink_msg_attitude_send函数对姿态数据进行发送
void GCS_MAVLINK::send_attitude() const
{
const AP_AHRS &ahrs = AP::ahrs();
const Vector3f omega = ahrs.get_gyro();
mavlink_msg_attitude_send(
chan,
AP_HAL::millis(),
ahrs.roll,
ahrs.pitch,
ahrs.yaw,
omega.x,
omega.y,
omega.z);
}
mavlink_msg_attitude_send的定义如下:改函数调用mavlink库函数对姿态进行打包发送。到此mavlink的发送流程就结束了
static inline void mavlink_msg_attitude_send(mavlink_channel_t chan, uint32_t time_boot_ms, float roll, float pitch, float yaw, float rollspeed, float pitchspeed, float yawspeed)
{
#if MAVLINK_NEED_BYTE_SWAP || !MAVLINK_ALIGNED_FIELDS
char buf[MAVLINK_MSG_ID_ATTITUDE_LEN];
_mav_put_uint32_t(buf, 0, time_boot_ms);
_mav_put_float(buf, 4, roll);
_mav_put_float(buf, 8, pitch);
_mav_put_float(buf, 12, yaw);
_mav_put_float(buf, 16, rollspeed);
_mav_put_float(buf, 20, pitchspeed);
_mav_put_float(buf, 24, yawspeed);
_mav_finalize_message_chan_send(chan, MAVLINK_MSG_ID_ATTITUDE, buf, MAVLINK_MSG_ID_ATTITUDE_MIN_LEN, MAVLINK_MSG_ID_ATTITUDE_LEN, MAVLINK_MSG_ID_ATTITUDE_CRC);
#else
mavlink_attitude_t packet;
packet.time_boot_ms = time_boot_ms;
packet.roll = roll;
packet.pitch = pitch;
packet.yaw = yaw;
packet.rollspeed = rollspeed;
packet.pitchspeed = pitchspeed;
packet.yawspeed = yawspeed;
_mav_finalize_message_chan_send(chan, MAVLINK_MSG_ID_ATTITUDE, (const char *)&packet, MAVLINK_MSG_ID_ATTITUDE_MIN_LEN, MAVLINK_MSG_ID_ATTITUDE_LEN, MAVLINK_MSG_ID_ATTITUDE_CRC);
#endif
}