11_SPI_Flash 读数据实验
1. 实验目标
使用页写或连续写操作向 Flash 芯片写入数据,再使用数据读操作读取之前写入数据,将读取的数据使用串口传回 PC 机,使用串口助手传回数据并与之前写入数据比较,判断正误。
2. 操作时序
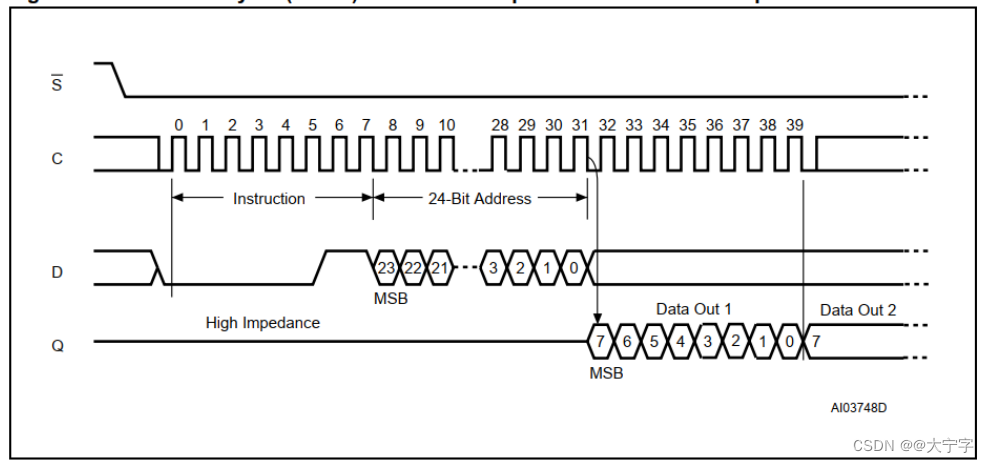
2.1 数据读操作指令

2.2 数据读操作时序

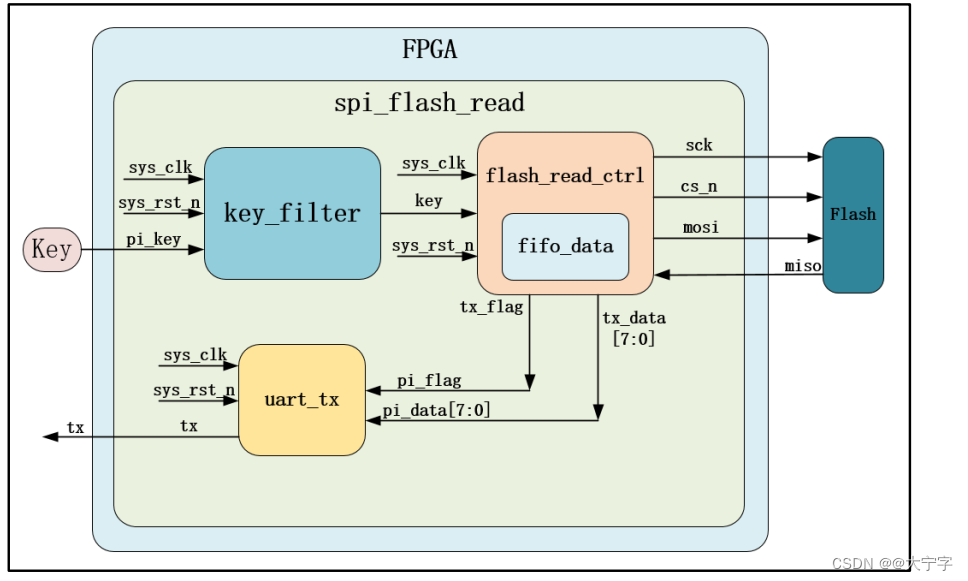
3. 流程框图
3.1 顶层模块
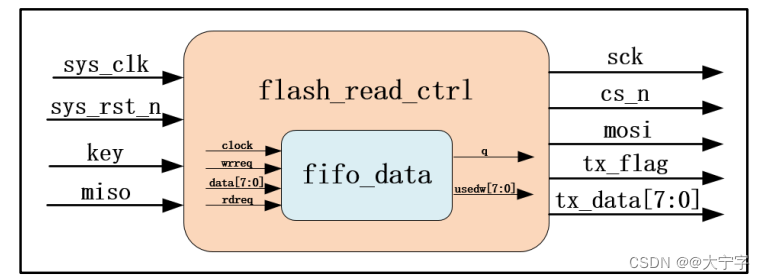
3.2 数据读模块

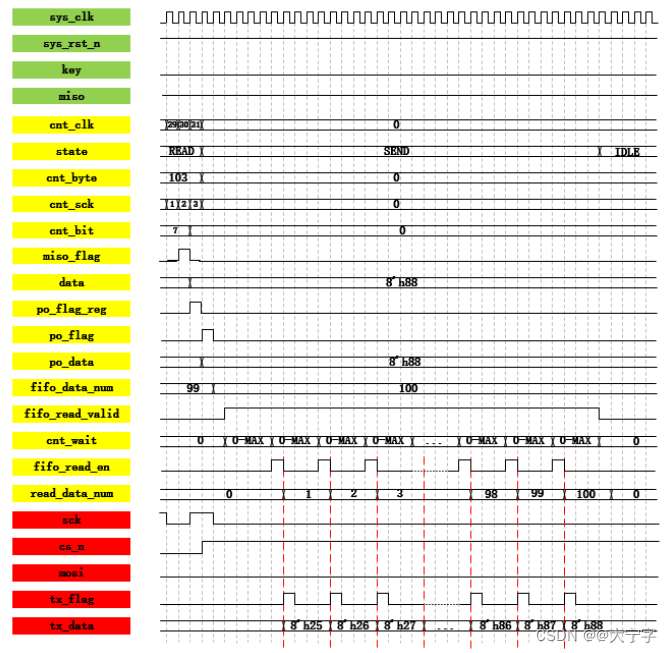
4. 波形图绘制
读取数据阶段
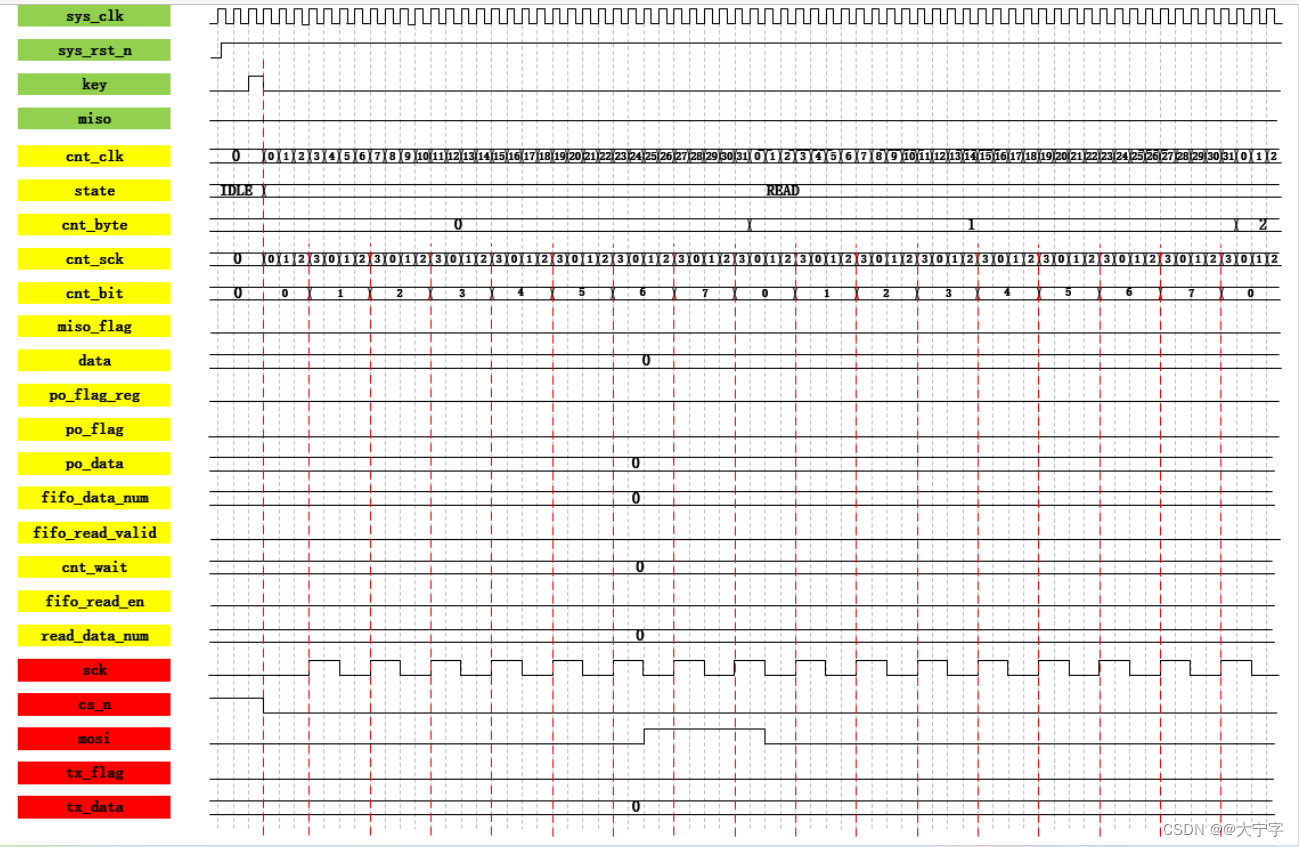
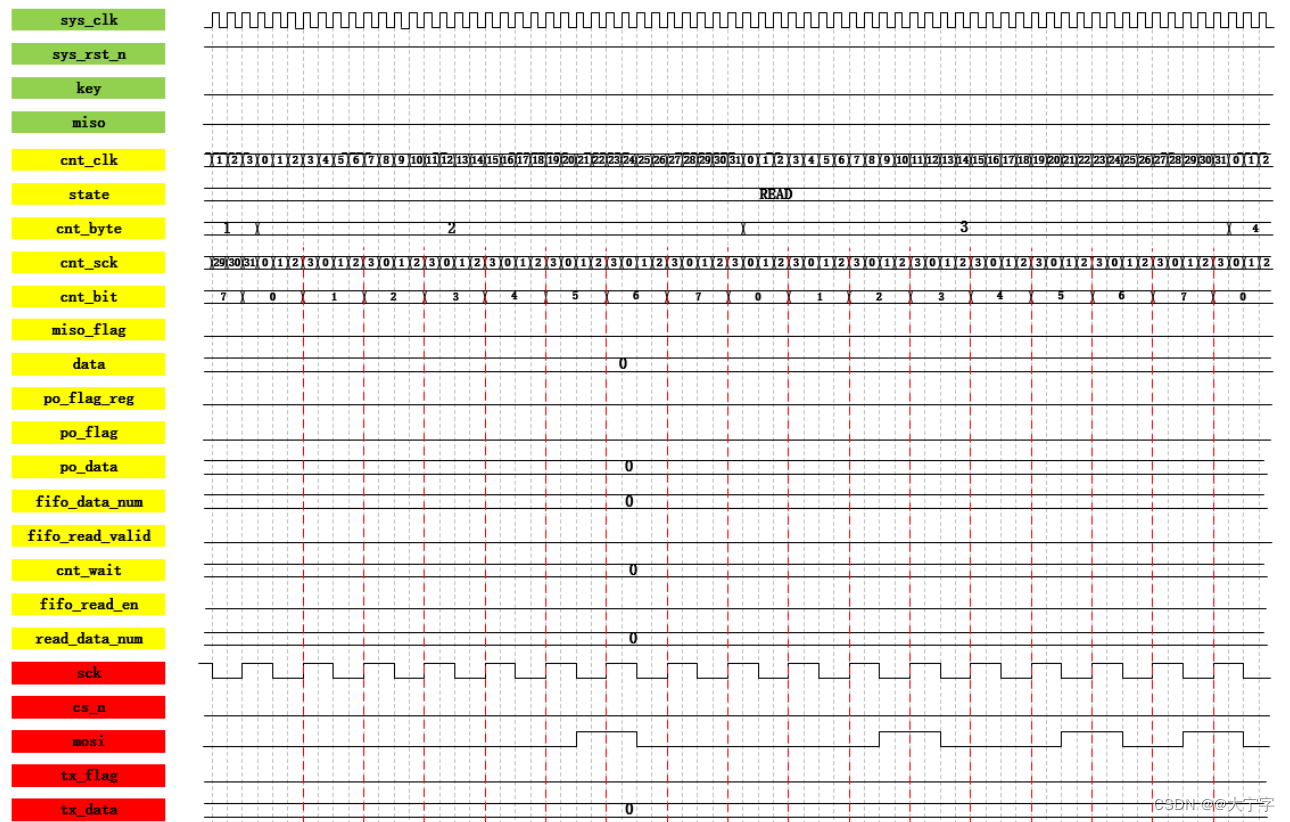
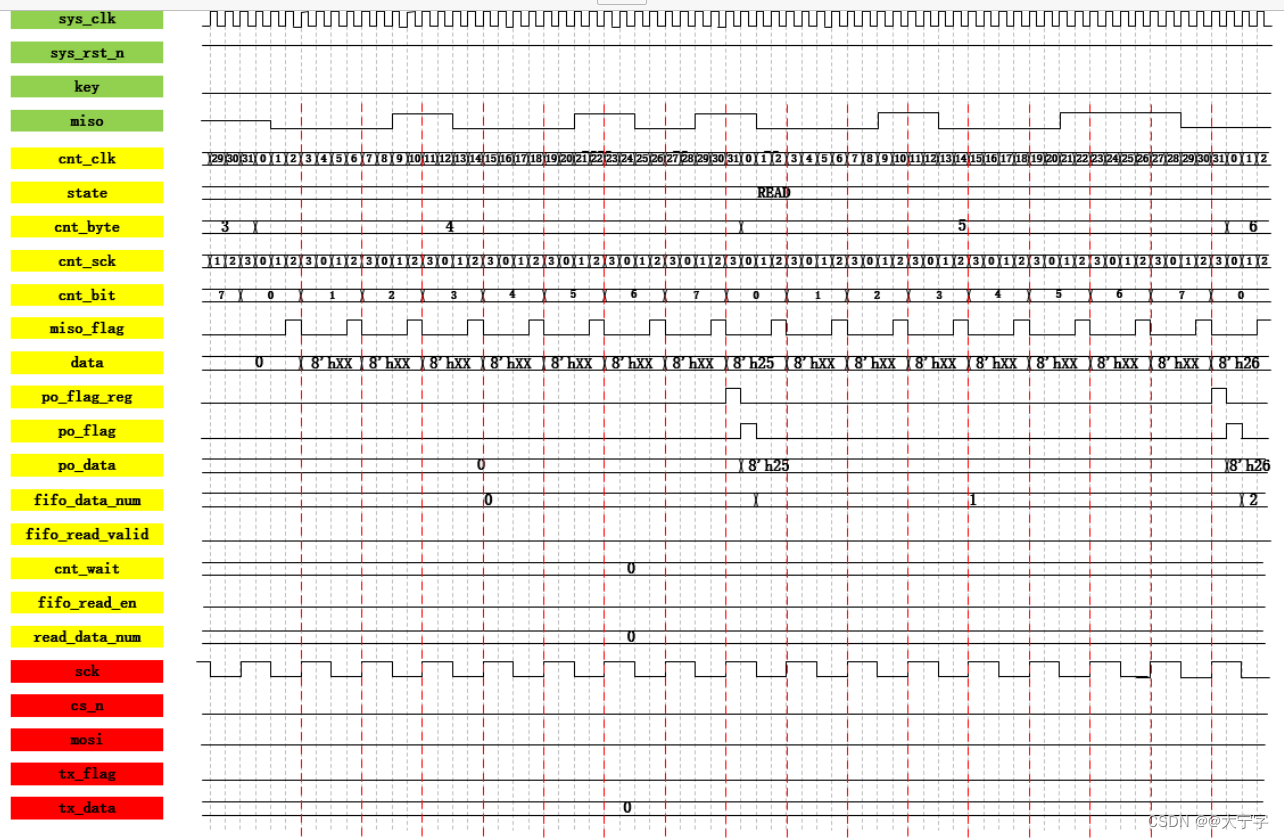
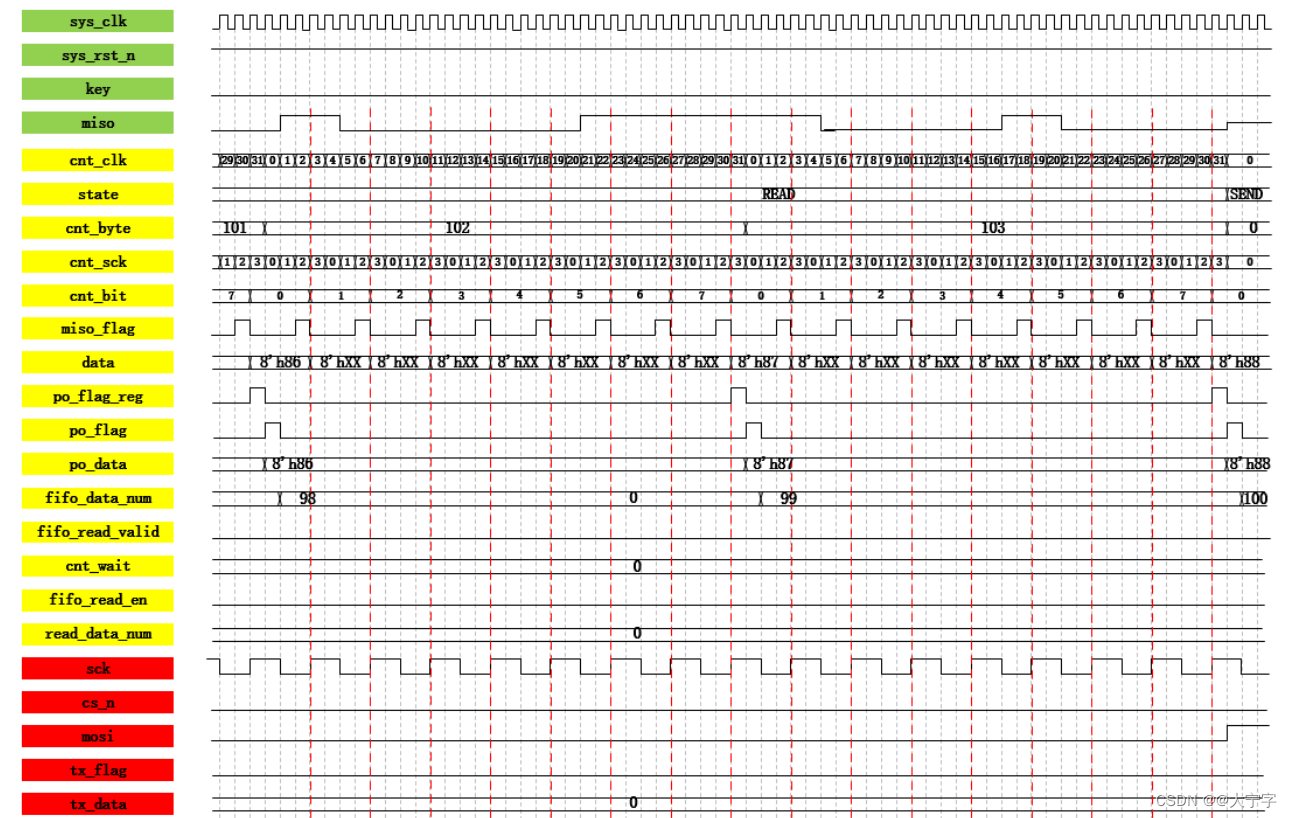
读出了数据,下面是把串行的数据 转换为并行的数据,传入到接口数据的读取上升沿。
5. RTL
5.1 flash_read_ctrl
`timescale 1ns/1ns
module flash_read_ctrl(
input wire sys_clk , //系统时钟,频率50MHz
input wire sys_rst_n , //复位信号,低电平有效
input wire key , //按键输入信号
input wire miso , //读出flash数据
output reg sck , //串行时钟
output reg cs_n , //片选信号
output reg mosi , //主输出从输入数据
output reg tx_flag , //输出数据标志信号
output wire [7:0] tx_data //输出数据
);
//********************************************************************//
//****************** Parameter and Internal Signal *******************//
//********************************************************************//
//parameter define
parameter IDLE = 3'b001 , //初始状态
READ = 3'b010 , //数据读状态
SEND = 3'b100 ; //数据发送状态
parameter READ_INST = 8'b0000_0011; //读指令
parameter NUM_DATA = 16'd100 ; //读出数据个数
parameter SECTOR_ADDR = 8'b0000_0000, //扇区地址
PAGE_ADDR = 8'b0000_0100, //页地址
BYTE_ADDR = 8'b0010_0101; //字节地址
parameter CNT_WAIT_MAX= 16'd6_00_00 ;
//wire define
wire [7:0] fifo_data_num ; //fifo内数据个数
//reg define
reg [4:0] cnt_clk ; //系统时钟计数器
reg [2:0] state ; //状态机状态
reg [15:0] cnt_byte ; //字节计数器
reg [1:0] cnt_sck ; //串行时钟计数器
reg [2:0] cnt_bit ; //比特计数器
reg miso_flag ; //miso提取标志信号
reg [7:0] data ; //拼接数据
reg po_flag_reg ; //输出数据标志信号
reg po_flag ; //输出数据
reg [7:0] po_data ; //输出数据
reg fifo_read_valid ; //fifo读有效信号
reg [15:0] cnt_wait ; //等待计数器
reg fifo_read_en ; //fifo读使能
reg [7:0] read_data_num ; //读出fifo数据个数
//********************************************************************//
//***************************** Main Code ****************************//
//********************************************************************//
//cnt_clk:系统时钟计数器,用以记录单个字节
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_clk <= 5'd0;
else if(state == READ)
cnt_clk <= cnt_clk + 1'b1;
//cnt_byte:记录输出字节个数和等待时间
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_byte <= 16'd0;
else if((cnt_clk == 5'd31) && (cnt_byte == NUM_DATA + 16'd3))
cnt_byte <= 16'd0;
else if(cnt_clk == 5'd31)
cnt_byte <= cnt_byte + 1'b1;
//cnt_sck:串行时钟计数器,用以生成串行时钟
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_sck <= 2'd0;
else if(state == READ)
cnt_sck <= cnt_sck + 1'b1;
//cs_n:片选信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cs_n <= 1'b1;
else if(key == 1'b1)
cs_n <= 1'b0;
else if((cnt_byte == NUM_DATA + 16'd3) && (cnt_clk == 5'd31) && (state == READ))
cs_n <= 1'b1;
//sck:输出串行时钟
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
sck <= 1'b0;
else if(cnt_sck == 2'd0)
sck <= 1'b0;
else if(cnt_sck == 2'd2)
sck <= 1'b1;
//cnt_bit:高低位对调,控制mosi输出
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_bit <= 3'd0;
else if(cnt_sck == 2'd2)
cnt_bit <= cnt_bit + 1'b1;
//state:两段式状态机第一段,状态跳转
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
state <= IDLE;
else
case(state)
IDLE: if(key == 1'b1)
state <= READ;
READ: if((cnt_byte == NUM_DATA + 16'd3) && (cnt_clk == 5'd31))
state <= SEND;
SEND: if((read_data_num == NUM_DATA)
&& ((cnt_wait == (CNT_WAIT_MAX - 1'b1))))
state <= IDLE;
default: state <= IDLE;
endcase
//mosi:两段式状态机第二段,逻辑输出
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
mosi <= 1'b0;
else if((state == READ) && (cnt_byte>= 16'd4))
mosi <= 1'b0;
else if((state == READ) && (cnt_byte == 16'd0) && (cnt_sck == 2'd0))
mosi <= READ_INST[7 - cnt_bit]; //读指令
else if((state == READ) && (cnt_byte == 16'd1) && (cnt_sck == 2'd0))
mosi <= SECTOR_ADDR[7 - cnt_bit]; //扇区地址
else if((state == READ) && (cnt_byte == 16'd2) && (cnt_sck == 2'd0))
mosi <= PAGE_ADDR[7 - cnt_bit]; //页地址
else if((state == READ) && (cnt_byte == 16'd3) && (cnt_sck == 2'd0))
mosi <= BYTE_ADDR[7 - cnt_bit]; //字节地址
//miso_flag:miso提取标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
miso_flag <= 1'b0;
else if((cnt_byte >= 16'd4) && (cnt_sck == 2'd1))
miso_flag <= 1'b1;
else
miso_flag <= 1'b0;
//data:拼接数据
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
data <= 8'd0;
else if(miso_flag == 1'b1)
data <= {
data[6:0],miso};
//po_flag_reg:输出数据标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
po_flag_reg <= 1'b0;
else if((cnt_bit == 3'd7) && (miso_flag == 1'b1))
po_flag_reg <= 1'b1;
else
po_flag_reg <= 1'b0;
//po_flag:输出数据标志信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
po_flag <= 1'b0;
else
po_flag <= po_flag_reg;
//po_data:输出数据
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
po_data <= 8'd0;
else if(po_flag_reg == 1'b1)
po_data <= data;
else
po_data <= po_data;
//fifo_read_valid:fifo读有效信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
fifo_read_valid <= 1'b0;
else if((read_data_num == NUM_DATA)
&& ((cnt_wait == (CNT_WAIT_MAX - 1'b1))))
fifo_read_valid <= 1'b0;
else if(fifo_data_num == NUM_DATA)
fifo_read_valid <= 1'b1;
//cnt_wait:两数据读取时间间隔
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
cnt_wait <= 16'd0;
else if(fifo_read_valid == 1'b0)
cnt_wait <= 16'd0;
else if(cnt_wait == (CNT_WAIT_MAX - 1'b1))
cnt_wait <= 16'd0;
else if(fifo_read_valid == 1'b1)
cnt_wait <= cnt_wait + 1'b1;
//fifo_read_en:fifo读使能信号
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
fifo_read_en <= 1'b0;
else if((cnt_wait == (CNT_WAIT_MAX - 1'b1))
&& (read_data_num < NUM_DATA))
fifo_read_en <= 1'b1;
else
fifo_read_en <= 1'b0;
//read_data_num:自fifo中读出数据个数计数
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
read_data_num <= 8'd0;
else if(fifo_read_valid == 1'b0)
read_data_num <= 8'd0;
else if(fifo_read_en == 1'b1)
read_data_num <= read_data_num + 1'b1;
//tx_flag
always@(posedge sys_clk or negedge sys_rst_n)
if(sys_rst_n == 1'b0)
tx_flag <= 1'b0;
else
tx_flag <= fifo_read_en;
//********************************************************************//
//*************************** Instantiation **************************//
//********************************************************************//
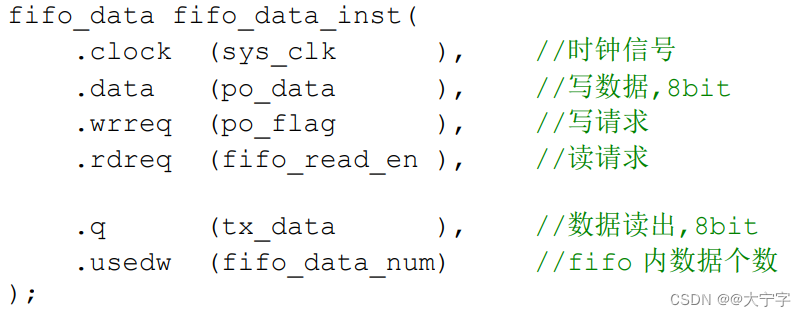
//-------------fifo_data_inst--------------
fifo_data fifo_data_inst(
.clock (sys_clk ), //时钟信号
.data (po_data ), //写数据,8bit
.wrreq (po_flag ), //写请求
.rdreq (fifo_read_en ), //读请求
.q (tx_data ), //数据读出,8bit
.usedw (fifo_data_num) //fifo内数据个数
);
endmodule
5.2 spi_flash_read
`timescale 1ns/1ns
module spi_flash_read(
input wire sys_clk , //系统时钟,频率50MHz
input wire sys_rst_n , //复位信号,低电平有效
input wire pi_key , //按键输入信号
input wire miso , //读出flash数据
output wire cs_n , //片选信号
output wire sck , //串行时钟
output wire mosi , //主输出从输入数据
output wire tx
);
//********************************************************************//
//****************** Parameter and Internal Signal *******************//
//********************************************************************//
//parameter define
parameter CNT_MAX = 20'd999_999 ; //计数器计数最大值
parameter UART_BPS = 14'd9600 , //比特率
CLK_FREQ = 26'd50_000_000 ; //时钟频率
//wire define
wire po_key ; //消抖处理后的按键信号
wire tx_flag ; //输入串口发送模块数据标志信号
wire [7:0] tx_data ; //输入串口发送模块数据
//********************************************************************//
//*************************** Instantiation **************************//
//********************************************************************//
//------------- key_filter_inst -------------
key_filter
#(
.CNT_MAX (CNT_MAX ) //计数器计数最大值
)
key_filter_inst
(
.sys_clk (sys_clk ), //系统时钟,频率50MHz
.sys_rst_n (sys_rst_n ), //复位信号,低电平有效
.key_in (pi_key ), //按键输入信号
.key_flag (po_key ) //消抖后信号
);
//-------------flash_read_ctrl_inst-------------
flash_read_ctrl flash_read_ctrl_inst(
.sys_clk (sys_clk ), //系统时钟,频率50MHz
.sys_rst_n (sys_rst_n ), //复位信号,低电平有效
.key (po_key ), //按键输入信号
.miso (miso ), //读出flash数据
.sck (sck ), //片选信号
.cs_n (cs_n ), //串行时钟
.mosi (mosi ), //主输出从输入数据
.tx_flag (tx_flag ), //输出数据标志信号
.tx_data (tx_data ) //输出数据
);
//-------------uart_tx_inst-------------
uart_tx
#(
.UART_BPS (UART_BPS ), //串口波特率
.CLK_FREQ (CLK_FREQ ) //时钟频率
)
uart_tx_inst(
.sys_clk (sys_clk ), //系统时钟50Mhz
.sys_rst_n (sys_rst_n), //全局复位
.pi_data (tx_data ), //并行数据
.pi_flag (tx_flag ), //并行数据有效标志信号
.tx (tx ) //串口发送数据
);
endmodule
6. testbench
`timescale 1ns/1ns
module tb_spi_flash_read();
//wire define
wire cs_n;
wire sck ;
wire mosi;
wire miso;
wire tx ;
//reg define
reg clk ;
reg rst_n ;
reg key ;
//时钟、复位信号、模拟按键信号
initial
begin
clk = 0;
rst_n <= 0;
key <= 0;
#100
rst_n <= 1;
#1000
key <= 1;
#20
key <= 0;
end
always #10 clk <= ~clk;
defparam memory.mem_access.initfile = "initM25P16_test.txt";
defparam spi_flash_read_inst.flash_read_ctrl_inst.CNT_WAIT_MAX = 1000;
defparam spi_flash_read_inst.uart_tx_inst.CLK_FREQ = 100000;
//------------- spi_flash_read -------------
spi_flash_read spi_flash_read_inst(
.sys_clk (clk ), //input sys_clk
.sys_rst_n (rst_n ), //input sys_rst
.pi_key (key ), //input key
.miso (miso ),
.sck (sck ), //output sck
.cs_n (cs_n ), //output cs_n
.mosi (mosi ), //output mosi
.tx (tx )
);
//------------- memory -------------
m25p16 memory (
.c (sck ),
.data_in (mosi ),
.s (cs_n ),
.w (1'b1 ),
.hold (1'b1 ),
.data_out (miso )
);
endmodule