智能网联模拟智慧交通综合实践开源平台是集无人驾驶综合平台、数字孪生和智慧沙盘车RTRC Pro于一体的平台,适用于各大高校教师教育教学和学生学习。当下各大高校智能网联汽车教育面临师资匮乏、课程资源紧缺、教材资料陈旧等等问题,智能网联模拟智慧交通综合实践开源平台不仅提供一流的师资教育和完整的课程资源,并配套相应的实践教育教具,软件与硬件一体化方案用以解决各大高校对人才培养的难题。
一、建设背景
随着信息化与汽车的深度融合,汽车正在从传统的交通运输工具转变为新型的智能出行载体,发展智能网联车对一个国家而言具有战略意义,因此近年来我国大力支持智能网联车的发展。李克强在“首届车路协同自动驾驶国际论坛”上做了《智能网联汽车云控基础平台及其实现》的主题演讲。介绍了从政策扶持、制定道路测试法规、建设示范区、基础数据平台、产业创新联盟和批准重点项目等多方面推进我国智能网联车的发展。同年,工业和信息化部关于印发《车联网(智能网联汽车)产业发展行动计划》的通知。通知强调,要加快车载视觉系统、激光/毫米波雷达、多域控制器、惯性导航等感知器件的联合开发和成果转化。加快推动智能车载终端、车规级芯片等关键零部件的研发,促进新一代人工智能、高精度定位及动态地图等技术在智能网联汽车上的产业化应用。
智能网联模拟智慧交通综合实践开源平台是一套能实现智能网联与无人驾驶综合沙盘的智能交通道路系统,它以无线通信、传感器检测等技术为基础,实现车辆信息的交互获取和共享,以信息技术实现人、车、协调、一体化的综合管控。可支撑学生在本科学年中的相关课程建设、科研项目和本科课外科研活动内容。能够帮助学生开发包括协作式优先车辆通行、动态车道管理、浮动车数据采集、智能信控等各项功能。
二、平台展示
1.无人驾驶综合沙盘(RTST Standard)

1.基本构成
(1)底座
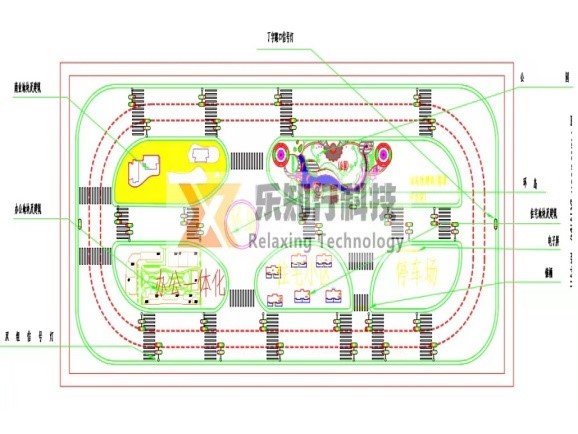
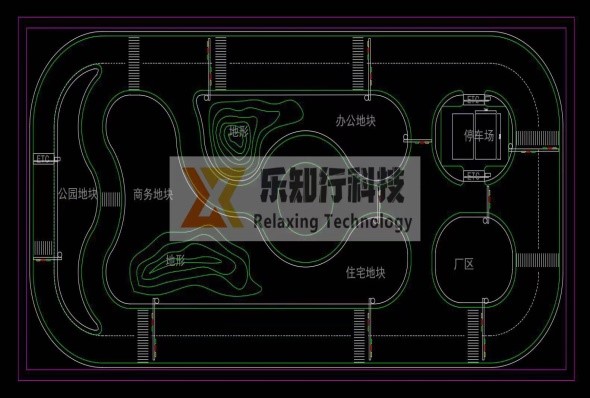
该图为无人驾驶综合沙盘(RTST Standard)占地面积约为32平方米,同时可根据其自身需求调整内部框架的高度结构,其材质主要采用铝塑板、复合木材、长螺丝等,使其具有防蛀、耐变形的性能。
(2)场景内容
主要包括:灯光电路、地块及建筑、绿化(景观比例:1:100)、城市道路(道路比例:1:10)、高速道路、交通场景、城市车辆RTRC Pro等相关场景内容。
2.功能展示
通过模拟真实智能交通系统的智能车模块,进行无人车自动驾驶、自动巡航、自动避障、智能交通信号控制、全局路径规划等多项功能。智能红绿灯根据十字路口数量相应配置,红绿灯依次变换等。
3.案例展示
(1)无人驾驶综合沙盘定制案例




(2)无人驾驶综合沙盘案例实图




2.数字孪生(RTST System)

该系统完整展现未来智慧交通系统全貌,培养学生对智能网联交通系统的整体认知和对系统各部分结构组成、运行原理以及系统整体运转流程和原理的深入掌握,辅助智能网联汽车技术的综合教学。
1.基本构成
(1)智能数据接入与管理
为用户提供一站式的大数据处理能力,能够快速接入智慧沙盘车RTRC Pro数据、智能无人驾驶沙盘数据(如道路信息数据、实时视频源等),并实现统一管理。
(2)多样化数据分析面板构建
数字孪生场景的丰富性和实用性不仅体现在物理模型的精确雕刻,还体现在上层数据的多维分析上。图表样式因需而变,灵活响应需求,满足数字孪生场景中数据面板多场景、高复杂、高价值的数据分析展示需求。
(3)图层信息交互
采用“图层”进行信息交互,将不同维度的管理信息切割剖解成一个个单独的信息图层,各个信息图层可自由组合、按需叠加,最大限度地遵从原生的信息理解方式。
(4)数据交互
通过数据接口与现有无人驾驶综合沙盘及智慧沙盘车应用形成紧密协作关系。在原有系统基础上只需增加与3D场景的数据交互,即可完成从平面化视觉应用到3D可视化行业应用的飞跃。
(5)可视化编程
提供前端二三维组件的拖拽组装功能及后端复杂逻辑控制的可视化配置,可视化逻辑配置能力总体可以支持逻辑控制、逻辑流转以及流程控制三类,实现复杂业务逻辑,满足实际使用过程中应用场景需求。
(6)全仿真能力平台
提供底座场景基础能力及仿真能力的工具开发包,用户可对常用功能进行二次封装,实现数字孪生项目的规模化复制。
2.功能展示
(1)沙盘中控和传输软件系统
沙盘中控上可以实时显示小车摄像头的影像,沙盘中控上可显示整个沙盘的场景,并实时显示小车目前在沙盘上的位置。

Ⅰ支持对仿真套件中交通信号灯场景的红绿黄灯实时状态显示及远程控制;
Ⅱ支持仿真套件中智能路灯场景的设备实时状态显示和远程开关调光控制;
Ⅲ支持对仿真套件中道闸机的设备实时状态显示;
同时能够基于室内通信网络,构建远程RTRC Pro调试终端,实现RTRC Pro控制与智能驾驶的分离、实现沙盘控制与沙盘实体的分离、实现数据过程中的内容控制,从而提高车辆调试效率。
(2)实时画面和仿真套件

在三维地图中展示车辆的数字孪生模型、车辆实时规划轨迹,车辆转向时有转向提示;支持实时数据采集上传功能,包括:车身数据,雷达感知数据,图像数据,控制数据等,实时采集到的车辆激光雷达点云数据和车载摄像头图像、车辆实时空闲/运行状态、车速及舵机转角、展示车辆摄像头、激光雷达雷达、毫米波雷达、超声波雷达等设备的状态。
3.智能网联沙盘车(RTRC Pro)

1.基本构成
智能网联沙盘车(RTRC Pro)可基于智能网联教学车的交通标志识别、激光雷达的校园地图构建、深度学习的视觉场景识别、YOLO 深度学习框架的红绿灯识别等,承载学生毕业设计课题,打造智能网联汽车教学实验室,开设智能车辆工程专业基础课程、专业实践课程实践、课程设计、毕业设计和研究生综合实践课程以及算法验证实验课程。
(1)芯片
通过外形小巧的模组系统(SOM)将超级计算机的性能带到了边缘端。 高达21TOPS的加速计算能力可并行运行现代神经网络并处理来自多个高分辨率传感器的数据。支持智能驾驶课程的车道保持辅助(LKS)系统、自动紧急制动(AEB)系统、自适应巡航(ACC)系统、预碰撞安全系统(PCS)、自动泊车系统(APS)等功能场景测试开发与验证。
| 基本参数 |
|
| 名称 |
芯片 |
| 数量 |
1 |
| 技术参数 |
GPU:384-core NVIDIA Volta GPU with 48 Tensor Cores CPU:6-core NVIDIA Carmel Arm v8.2 64-bit CPU 6MB L2+4MB L3 内存:8GB 128-bit LPDDR4x 51.2GB/s 存储:16GB eMMC+128G SSD 支持网络:10/100/1000 BASE-T Ethernet |
(2)超声波传感器
超声波雷达是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。超声波近距离探测,探头频率越高,灵敏度越高,且防水、防尘,即使有少量的泥沙遮挡也不影响。可以支持超声波雷达障碍物检测,超声波雷达安装、认知、标定、数据读取、自动紧急制动(AEB)系统、自适应巡航(ACC)系统、自动泊车(APS)系统等教学实训课程。
| 基本参数 |
|
| 名称 |
超声波传感器 |
| 数量 |
2 |
| 技术参数 |
工作频率:≤40kHz 射程范围:2cm~4m 测量角度:≤15度 |
(3)摄像头
摄像头可传送动态录像,将物体录入数据中,采用3D激光轮廓传感器技术,对物体轮廓数据采集并转换成2D图像数据分析,经过图像面积分割处理,可获取车辆的外部数据信息和众多目标车辆的实时运动状态信息和位置信息等。摄像头模组可以支持行人识别、红绿灯识别、交通标志识别、障碍物识别、车道线识别,摄像头安装、认知、标定、数据读取,摄像头+激光雷达融合感知等教学实训课程。
| 基本参数 |
|
| 名称 |
摄像头 |
| 数量 |
1 |
| 技术参数 |
深度分辨率和帧率:≥1280x720 90fps RGB传感器分辨率和帧率:≥1920x1080 30fps 深度距离范围:0.105m-10m 使用环境支持:室内/室外 |
(4)毫米波雷达
毫米波雷达由天线、收发模块、信号处理模块共同组成。通过振荡器发射频率随时间逐渐增加得电磁波,并根据返回波形和发出的波形得频率差计算前方目标的相对距离和相对车速等。毫米波雷达可支持毫米波雷达障碍物检测,毫米波雷达安装、认知、标定、数据读取以及自适应巡航(ACC)系统等教学实训课程。
| 基本参数 |
|
| 名称 |
毫米波雷达 |
| 数量 |
1 |
| 技术参数 |
工作电压:DC 3.0V~3.6V(典型值 3.3V) 工作温度:-35~80℃ 静态电流:<10uA 测距范围 0.2m~12.5m 单次最大测距长度:≤12.3m |
(5)IMU传感器
IMU传感器是加速度计和陀螺仪传感器的组合,被用来检测加速度和角速度以表示运动和运动强度。IMU传感器不仅可以提供车辆位置相关信息,还可以提供车身姿态方面的信息,为汽车方向感知提供决定性参考依据。IMU传感器可以支持车道保持辅助(LKS)系统、自动紧急制动(AEB)系统,预碰撞安全(PCS)系统、自适应巡航(ACC)系统以及自动泊车(APS)系统等教学实训课程。
| 基本参数 |
|
| 名称 |
IMU传感器 |
| 数量 |
1 |
| 技术参数 |
工作电压:4.7-5.5V 防震范围:±8g 轴数:≥9轴 频率输出:200Hz 俯仰/翻滚角精度(静态):0.7°RMS 俯仰/翻滚角精度(动态):2.5°RMS |
(6)激光雷达
激光雷达是以发射激光束来探测目标空间位置的主动测量设备。向目标发射探测信号,然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息。激光雷达可支持车道保持辅助(LKS)系统、预碰撞安全(PCS)系统、自动泊车(APS)系统等教学实训课程。
| 基本参数 |
|
| 名称 |
激光雷达 |
| 数量 |
1 |
| 技术参数 |
测量距离:≤12m 测量盲区:≤0.2m 扫描频率:5Hz-15Hz 俯仰角:±1.5° 采样频率:≤16K |
(7)GPS
是车载航位推算模块,该模块集成 GNSS 接收机、6 轴惯性传感器能 够为道路行驶车辆提供连续的高精度 3D 定位。具有高灵敏度、低功耗特点,适用于车载导航手持定位。
| 基本参数 |
|
| 名称 |
GPS |
| 数量 |
1 |
| 技术参数 |
供电电压:3.3-5V 电流:45mA 波特率:9600(默认)、38400、115200 更新速率:1Hz 工作温度:-30---85℃ 模块尺寸:36*25*4 带陶瓷天线:厚13mm |
(8)UWB
UWB是一种无载波通信技术,通过在较宽的频谱上传送极低功率的信号,能实现数百Mbit/s至2Gbit/s的数据传输速率。而且具有穿透力强、功耗低、抗干扰效果好、安全性高、空间容量大、能精确定位等诸多优点。
| 基本参数 |
|
| 名称 |
UWB |
| 数量 |
1 |
| 技术参数 |
供电电压:3.3-5V 电流:45mA 波特率:9600(默认)、38400、115200 更新速率:1Hz 工作温度:-30---85℃ 模块尺寸:36*25*4 带陶瓷天线:厚13mm |
(9)激光测距传感器
激光测距传感器支持通信方式配置,预留两个通信接口用于级联测距。同时支持输出模式配置,让数据获取更加自由。每个传感器可配置ID,将多个传感器串联通过一个通信接口即可读取所有的传感的测距信息。
| 基本参数 |
|
| 名称 |
激光测距传感器 |
| 数量 |
1 |
| 技术参数 |
尺寸:35.6*13.0*8.1mm 低盲区:1.5cm 重量:2.7g 测量范围:1.5cm-5m 分辨率:1mm 量程:8m FOV角27° 尾线线长:30cm 线材接口:GH1.25 4P |
(10)舵机
舵机是在自动驾驶中操纵转动的执行部件,适用于需要角度不断变化并可以保持的控制系统。RTRC模型车舵机转向系统直接采用固定轴承加摆臂的形式转变拉杆的运动方向,最后使转向节臂左右摆动,实现转向。舵机可支持自动驾驶等多种功能场景等教学实训课程。
| 基本参数 |
|
| 名称 |
舵机 |
| 数量 |
1 |
| 技术参数 |
角度:O-360° 齿轮虚位≤0.5° 保存温度:-30℃~80℃ 运行温度:-20℃~60℃ 工作电压:4V-7.4V |
(11)电机
电机是依据电磁感应定律实现电能转换或传递的一种电磁装置。通过变速器、减速器等机械传动装置,将电动机输出电矩,传递到左右车轮驱动汽车行驶。通过变速器、减速器等机械传动装置,将电动机输出力矩,传递到左右车轮驱动汽车行驶。电机可支持自动驾驶等多种功能场景等教学实训课程。
| 基本参数 |
|
| 名称 |
电机 |
| 数量 |
1 |
| 技术参数 |
比例:1/10th 有刷/无刷:无刷 有感/无感:有感 支持锂电池节数:2-3S |
(12)电调
电调针对电机不同,可分为有刷电调和无刷电调,它根据控制信号调节电机的转速,控制电机的启、停、加速、减速、正转、反转等,控制,控制电机的启、停、加速、减速、正转、反转等,控制智能网联RTRC的运动状态。电调可支持自动驾驶等多种功能场景等教学实训课程。
| 基本参数 |
|
| 名称 |
电调 |
| 数量 |
1 |
| 技术参数 |
电压:6V-60V,(安全LiPo为3S到12)电压峰值不超过60V 电流:连续电流80-100A,突发电流120A 输出电流:0.5-1A 输出电压:3.3-5V 模式支持:BLDC,FOC(正弦) 支持传感器:ABI,HALL,AS5047,TS5700N8501 通讯端口支持:USB,CAN,UART,PWM |
2.功能展示
提供紧急制动系统、预碰撞安全系统、自适应巡航系统、自动泊车系统、斑马线识别制动、红绿灯识别制动、行人识别并跟随、锥桶识别、交通标志识别、激光雷达构建室内地图(gmapping)等功能。
| RTRC PRO设备功能 |
||
| 实时建图 |
既定路线导航 |
交通信号灯识别并进行启停 |
| 获取实时车辆速度、转角、自身姿态 |
深度摄像头定位 |
停车场监控系统 |
| ETC交互系统 |
智能泊车 |
车道保持辅助系统 |
| 静态障碍物绕行 |
闯红灯拍照 |
路面锥桶识别并制动 |
| 十字路口、T字路口、环岛转向通行 |
激光雷达定位 |
与碰撞安全系统 |
| 紧急制动系统 |
UWB定位 |
自适应巡航 |
| 车载摄像头实时传输 |
超速抓拍系统 |
行人识别 |
| 多车编队巡航 |
斑马线识别 |
红绿灯识别 |
3.预期成效
支撑本科或高职等相关课程开设。老师可根据相关课程进行科技研究项目的开发和学生课外项目,可移植、孵化自主申报科研立项,参加“互联网+”创新创业大赛等国家级比赛,进行技术成果转化进行专利申报和论文发表。
1.课程开设
本建设方案教学设备可支撑开设以下课程:
| 智能网联课程开设 |
||
| 智能网联汽车环境感知技术 |
测试与传感技术 |
汽车电工电子技术 |
| 智能终端安装与测试 |
智能网联汽车环境感知技术 |
车联网技术与应用 |
| 智能网联车辆改装技术 |
测试与检测技术基础 |
汽车车载网络技术 |
| Matlab及其工程应用 |
汽车电子控制原理与技术应用 |
新能源汽车技术 |
| 汽车电子控制 |
智能网联汽车实践 |
车用发动机原理 |
| 有限元在车辆工程中的应用 |
智能网联汽车概述 |
智能网联汽车计算基础 |
| 智能网联汽车底盘控制技术 |
计算机图像与图像处理 |
ROS系统原理与应用 |
| 车辆人机工程学 |
汽车车身结构与设计 |
Python语言程序设计 |
| 汽车电子控制技术 |
智能网联汽车实践 |
智能网联汽车技术 |
| 驱动电机及控制技术 |
汽车电子控制技术 |
智能网联传感器的原理认知 |
本建设方案教学设备可开设以下课程(详情可点击www.relaxing-learning.cn查看):

免费配套完整的课程视频、PPT、实验指导书、实验报告、源代码
| RTRC Pro课程目录 |
||
| 前期准备 |
车辆安装 |
|
| 传感器及执行件标定 |
舵机标定 |
|
| 电机标定 |
||
| IMU标定 |
||
| ROS与传感器数据读取及执行件控制 |
舵机控制 |
|
| 电机控制 |
||
| 深度摄像头数据读取 |
||
| 超声波数据读取 |
||
| 毫米波数据读取 |
||
| IMU数据读取 |
||
| UWB数据读取 |
||
| 激光雷达数据读取 |
||
| ROS与基础功能 |
车道保持系统 |
|
| 紧急制动系统 |
||
| 自适应巡航系统 |
||
| 预碰撞安全系统 |
||
| 自动泊车系统 |
||
| 斑马线减速系统 |
||
| 红绿灯制动系统 |
||
| 定位导航 |
建图 |
激光雷达及IMU融合建图 |
| 定位 |
激光雷达及IMU融合定位 |
|
| uwb及IMU融合定位 |
||
| 轨迹规划 |
高精度地图信息 |
|
| 轨迹行驶控制算法 |
||
| 功能 |
全局路径规划导航 |
|
| 单车自主巡航 |
||
| 多车编队行驶 |
||
| 避障 |
||
| 车路协同 |
通讯实例 |
沙盘 |
| 数字孪生 |
||
| 功能 |
红绿灯与ETC交互 | |
(1)实验指导书&实验报告书
包含车道保持辅助系统、预碰撞安全系统、自动紧急制动系统、自适应巡航控制系统、自动泊车系统等内容,满足学生上课需求,学生课后学习,学生作业下达,让学生了解实验目的,掌握实验原理,能独立完成实验,并能够根据所学知识进行自主开发创新设计,培养学生实践能力、学科交叉能力、创新能力和自主学习能力。
(2)课程PPT
应包含车道保持辅助系统、预碰撞安全系统、自动紧急制动系统、自适应巡航控制系统、自动泊车系统等内容,满足教学大纲要求,满足学生上课需求,图文并茂,学生可根据PPT学习设备标定、环境感知融合、路径决策规划等智能网联专业基础知识,培养学生有信息获取与表达能力、自学能力、创新思维能力和应用知识解决问题的能力。
(3)教学视频
应包含车道保持辅助系统、预碰撞安全系统、自动紧急制动系统、自适应巡航控制系统、自动泊车系统等内容,满足教学大纲要求,满足学生上课需求,学生可根据基础教学视频,正确使用设备、操作注意事项、设备维护等,能熟练掌握设备的各种基本操作,并能完成一般故障的定位和排除,同时可对设备进行维护等,培养学生自学能力、创新思维能力和实践能力,为后续学习奠定坚实的基础。
(4)开源代码
应包含车道保持辅助系统、预碰撞安全系统、自动紧急制动系统、自适应巡航控制系统、自动泊车系统等内容,学生可根据提供的开源代码,进行二次开发,基于原理性知识给学生提供应用实践教学,把理论知识与实践相结合的教学模式自主进行实践和拓展,学习智能网联汽车相关知识的同时提高自学能力和创新能力。
2.科研项目
可支撑研究生及教师科研项目,教师和研究生可基于视觉和雷达的目标检测与识别、环境感知系统多传感器融合技术、基于激光雷达的SLAM点云地图构建、对智能驾驶感知算法验证与应用(环境感知、图像处理开发、地图构建、深度学习、规划控制、复杂驱动方式电机控制、功能测试验证)。

结合行业新动态进行实验室功能拓展,基于项目进行科研类研究,可带领学生申请专利、科研立项、发表论文,不断更新相关知识如车路协同、障碍物检测系统、车位召唤驶出、自动驾驶与车身姿态联合控制、车身姿态稳定性控制等智能驾驶辅助系统相关项目,以及基于人工智能和深度学习的交通标志标线识别、红绿灯识别、文字识别、行人识别、泊车位识别、激光雷达SLAM建模等环境感知系统相关项目。

3.科技创新
可举办智能驾驶设计技术相关的课外科技活动或者学科竞赛项目,例如将激光雷达建图、雷达导航、红绿灯以及控制升降杆、自动泊车系统等集合开展智能网联车大赛,例如:APS泊车位识别、V2V无线数据交互等学生竞赛。通过搭载各种学生科技活动建设成为学生科技创新活动承载平台,以培养学生工程实践能力、学科交叉能力、创新能力和自主学习能力。
同时,也可基于学生创新创业教育的平台,在科技活动以及学科竞赛进行的同时,从中挑选出优秀的科研项目,带领学生参加国家大学生创新创业大赛,使学科竞赛平台更加完善与成熟,锻炼学生的综合能力并使其得到有效提升。
| 创新项目名称 |
|
| 基于MATLAB的万物识别及目标物分类 |
基于Yolo的红绿灯检测识别 |
| 基于Yolo的交通标志识别 |
基于Tensorflow的锥桶识别 |
| 基于OpenCV的斑马线识别 |
基于OpenCV的行人识别 |
| 激光雷达的SLAM实时定位与建图 |
伺服电机控制算法优化 |
| 基于RTRC的无线充电系统设计 |
基于OpenCV的车道保持辅助系统开发 |
| 基于超声波雷达的AEB系统开发 |
基于MATLAB/Simulink的APS系统开发 |
| 基于毫米波雷达的紧急制动系统开发 |
基于智能网联模型车的手机端APP开发 |
| 基于UDP通信 的视频传输 |
利用公网通信实现4G远程控制及视频读取 |
| 识别车牌记录车辆进出高速路口智能升降杆 |
|

4.办赛竞赛
学生可基于软件编程和程序调试等全方面的实践学习,从而提高参赛学生对当下热门的运动控制、无人驾驶算法、视觉识别算法的工程应用和现场调试能力,强化参赛学生对智能感知技术在实际工业应用的综合技能。
校赛可面向全校学生,以车辆工程学院、人工智能、计算机科学与通信工程学院、电气信息工程学院、机械学院等相关智能网联专业学生为主要参赛对象,加强学校的学科交叉,让不同院系的学生团结协作、相互学习、共同进步,培养多学科融合综合性人才。同时乐知行科技支持相关赛事举办,并拥有丰富经验。例:第一届智能网联汽车大赛。
市赛,以全省高等院校为参赛对象,每校推选队伍参赛,队伍可由与智能网联汽车相关的所有专业的学生自由组队,旨在加强学科交叉,让不同学校的学生团结协作、相互学习、共同进步。同时,该省部级赛事可面向多省开设,或者多省联合举办,旨在培养更多优秀综合性人才、扩大智能网联汽车影响力,为企业选拔定向输出优秀人才。同时乐知行科技支持相关赛事举办,并拥有丰富经验。例:首届重庆市大学生智能网联汽车大赛。
国赛,涵盖了控制、模式识别、传感技术、电子、电气、计算机、机械等多个学科交叉的科技创意性比赛,旨在培养学生对知识的把握和创新能力,以及从事科学研究的能力。

4.售后服务
提高产品质量和加强全方位的服务,是我公司一贯的宗旨,在售后服务上特别注重服务质量和维修的技术力量及响应的时间速度。为此配备了专业维修技术人品,由公司统一为用户进行定期和不定期的维修和保养等各种售后服务。公司内设有专门的售后服务部,经过专业的培训,技术过硬,服务态度好。除此之外,我司对购买设备客户可提供教学课程资源以及设备使用教程等,从而能够满足客户对我们的产品需求和售后服务的要求,实现对客户的承诺。

乐知行科技售后服务体系
1.产品质保
(1)质保期
提供产品质保期1年(非人为损坏),在质保期内,若由于我方的责任而需要对本系统中的部件(包括软件和硬件)予以更换或升级,则该部件的质保期相应延长。质保期外或其他原因,我方免费提供技术咨询服务,并提供有偿的维修服务。
(2)质保期维修方案
产品方案中所提供的服务内容,我方共为设备维护配备技术人员以及一对一客服人员。质保期到期后,我方技术人员将对设备每年进行一次整体测试及校正,同时针对我方客户定期提供免费设备维护及回访,并作记录。
(3)应急维修时间安排
我们以“客户第一、服务第一”的宗旨、进行系统的售后服务工作,我公司承诺所有的设备提供24h线上答疑服务,可随时通过电话、微信、邮件等多种通讯方式向我方进行技术咨询或相关设备咨询,我方会根据具体的需求情况通过线上或指派技术人员与客户直接沟通以解决问题,保证用户的故障投诉都得到及时的调查和解决,技术维护人员全天值守。
售后服务联系方式
电子邮件:[email protected]
微信售后客服人员:

2.设备使用及课程
(1)设备使用教程
免费提供基础设备使用教程,教程内容包含正确使用设备、操作注意事项、设备维护等。通过培训后,客户能熟练掌握设备的各种基本操作,并能完成一般故障的定位和排除,同时可对设备进行维护、日常管理等。
(2)同步更新课程
免费提供配套教学资源,包含课程PPT、教学视频、实验指导书、实验报告书等教学资源,并开通网站课程权限,客户可随时登录我司网站查看相关设备信息及对应课程内容。课程官网设置留言互动板块,客户可前往留言板块提问、互动,我司人员会及时针对客户问题作出解答。随着我司设备更迭换代,课程内容在课程网站进行同步更新,相关更新内容客户亦可随时阅览。