分布式估计器
定义系统参数
参考文献:https://ieeexplore.ieee.org/document/9750909
import numpy as np
# 状态个数
n = 4
# 传感器个数
N = 7
# 每个传感器的信息
ri = 1
# 状态矩阵,n*n
A = np.array([[0.1, 0, -0.1, 0],
[-0.2, -0.1, 0, 0],
[0, 0, 0.2, 0.2],
[-0.1, 0, 0, -0.3]
])
# 输出矩阵,N*n
C = np.array([[0, 2.0, 0, 0],
[0, 0, 1.5, 0],
[1.0, 0, 0, 0],
[0, 0, 2.0, 0],
[1.0, 0, 0, 0],
[0, 0, 0, 2.0],
[1.0, 0, 0, 0],
])
# 噪声转移矩阵,ri*ri
Phi=[]
for i in range(N):
Phi.append(np.array([-0.20 + 0.010 * (i+1)]))
Phi = np.concatenate(Phi)
# 噪声协方差
Q=np.eye(n)
R=0.1*np.ones([N,ri])
# 初值
x_0=2*np.ones([n,ri])
P_0=np.eye(n)
z_0=0.5 #*np.ones([N,ri])
# 领接矩阵
Adj=np.array([[1, 1, 0, 0, 0, 0, 1],
[1, 1, 1, 0, 0, 0, 0],
[0, 1, 1, 1, 0, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 0, 1, 1, 1, 0],
[0, 0, 0, 0, 1, 1, 1],
[1, 0, 0, 0, 0, 1, 1],
])
# 打印结果
print("Phi:\n", Phi)
print("Q:\n", Q)
print("R:\n", R)
print("z_0:\n", z_0)
print("x_0:\n", x_0)
print("Adj:\n", Adj)
B=np.dot(-C.T,np.dot(np.linalg.inv(np.diag([item for sublist in R for item in sublist])), C))
B
根据公式(5)~(8)
首先求解方程 A P + P A T + P B P = − Q AP + PA^T+PBP=-Q AP+PAT+PBP=−Q
其中, B = − C T R z − 1 C B=-C^TR_z^{-1}C B=−CTRz−1C
参考https://zhuanlan.zhihu.com/p/24893371
得到两种解
选择第一种解,因为第二种值太大了
from scipy.optimize import fsolve
B=np.dot(-C.T,np.dot(np.linalg.inv(np.diag([item for sublist in R for item in sublist])), C))
print(B)
# 方程AP + PA^T+PBP=-Q
def func(P):
P = P.reshape(n, n)
matrix = np.dot(A, P) + np.dot(P, A.T) + np.dot(P, np.dot(B, P)) + Q
# 将[[1] [2] [3] [4]],转成[1,2,3,4]
flat_list = [item for sublist in matrix for item in sublist]
return flat_list
P = fsolve(func,[1, 0, 0, 0,
0, 0, 0, 0,
0, 0, 1, 0,
0, 0, 0, 1])
P = P.reshape(n, n)
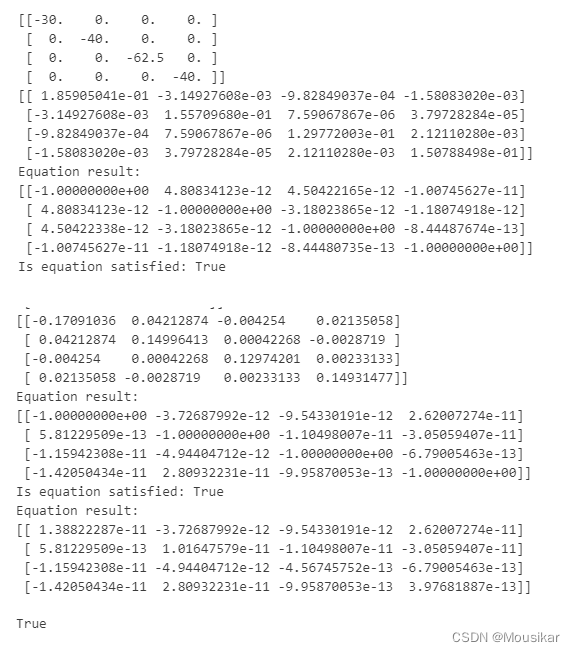
print(P)
# 验证结果
eqn_result = np.dot(A, P) + np.dot(P, A.T) + np.dot(P, np.dot(B, P))
print("Equation result:")
print(eqn_result)
print("Is equation satisfied:", np.allclose(eqn_result, -Q))
residual = np.dot(A, P) + np.dot(P, A.T) + np.dot(P, np.dot(B, P)) + Q
is_correct = np.allclose(residual, np.zeros_like(residual))
print("Equation result:")
print(residual)
is_correct
ξ i j \xi_{ij} ξij是传感器j对于传感器i的测量估计
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-JkYDUyrm-1689236960924)(attachment:image.png)]](https://img-blog.csdnimg.cn/743eda4e8dc54c00a022d6444a8e7e39.png)
ξij(0) = Cj x0
Cj是C矩阵的第j行
# the estimator gain 矩阵 n * N
K = - np.dot(P, np.dot(C.T, np.linalg.inv(np.diag([item for sublist in R for item in sublist])) ))
print("K:\n", K)
mu = 8 #2 * (1 - np.cos(np.pi / N)) # 可修改
# 初值
#
y0=[]
for i in range(N):
y0.append(np.dot(C[i], x_0))
print([item for sublist in y0 for item in sublist])
xi_0 = np.zeros_like(Adj)
for i in range(N):
for j in range(N):
if Adj[i][j]==1:
xi_0[j][i]=np.dot(C[j],x_0)
else:
xi_0[j][i]=0
# xi_0=Adj
print(xi_0)
print(xi_0[:,0])
求解微分方程
# 求解微分方程
import numpy as np
from scipy.integrate import solve_ivp
import matplotlib.pyplot as plt
mu = 10 #2 * (1 - np.cos(np.pi / N)) # 可修改
t_sum=15 # 秒
t_span = (0, t_sum) # 时间范围
t = np.linspace(0, t_sum, 77) # 用于绘制的时间点
# 设置随机种子,以便结果可复现
np.random.seed(0)
# 生成白噪声
white_noise = np.random.normal(0, 0.005, size=len(t))
# 生成维纳过程
wiener_process = np.cumsum(white_noise)
def white_noise_fun(target):
closest_index = min(range(len(t)), key=lambda i: abs(t[i] - target))
res= white_noise[closest_index]
return res
def wiener_process_fun(target):
closest_index = min(range(len(t)), key=lambda i: abs(t[i] - target))
res= wiener_process[closest_index]
return res
def matrix_differential_equation(tt, X):
x_hat = X[:n*N]
xi = X[n*N:]
x_hat = x_hat.reshape([N,n])# 都横着吧
xi = xi.reshape([N,N])
y = np.array([])
for i in range(N):
# y = np.append(y, np.dot(C[i], x_hat[i])) # + z_0 # 之后再加噪声
# y = np.append(y, np.dot(C[i], x_hat[i])) + white_noise_fun(tt); # + z_0
y = np.append(y, np.dot(C[i], x_hat[i])) + wiener_process_fun(tt) # + z_0
dot_x_hat = np.array([])
dot_xi = np.array([])
for i in range(N):
temp = np.dot(A + np.dot(K, C) , x_hat[i]) - np.dot(K, xi[i])
dot_x_hat = np.append(dot_x_hat, temp)
sum_N = np.zeros([1,N])
for k in range(N):
sum_N = sum_N + Adj[i][k] * (xi[i]-xi[k])
dd=-mu *(sum_N + np.dot(np.diag(Adj[:,i]) , (xi[i] - y))) + np.dot(np.dot(C, A) , x_hat[i])
dot_xi =np.append(dot_xi, dd)
dX_dt=np.array([])
dX_dt=np.append(dX_dt,dot_x_hat)
dX_dt=np.append(dX_dt,dot_xi)
return dX_dt
# 微分方程的初值
X = np.array([])
for i in range(N):
X=np.append(X,x_0.reshape(n))
X=np.append(X,xi_0.reshape(N*N))
print(X)
initial_condition = X # 初始条件
solution = solve_ivp(matrix_differential_equation, t_span, initial_condition, dense_output=True)
Y = solution.sol(t)
print(len(t))
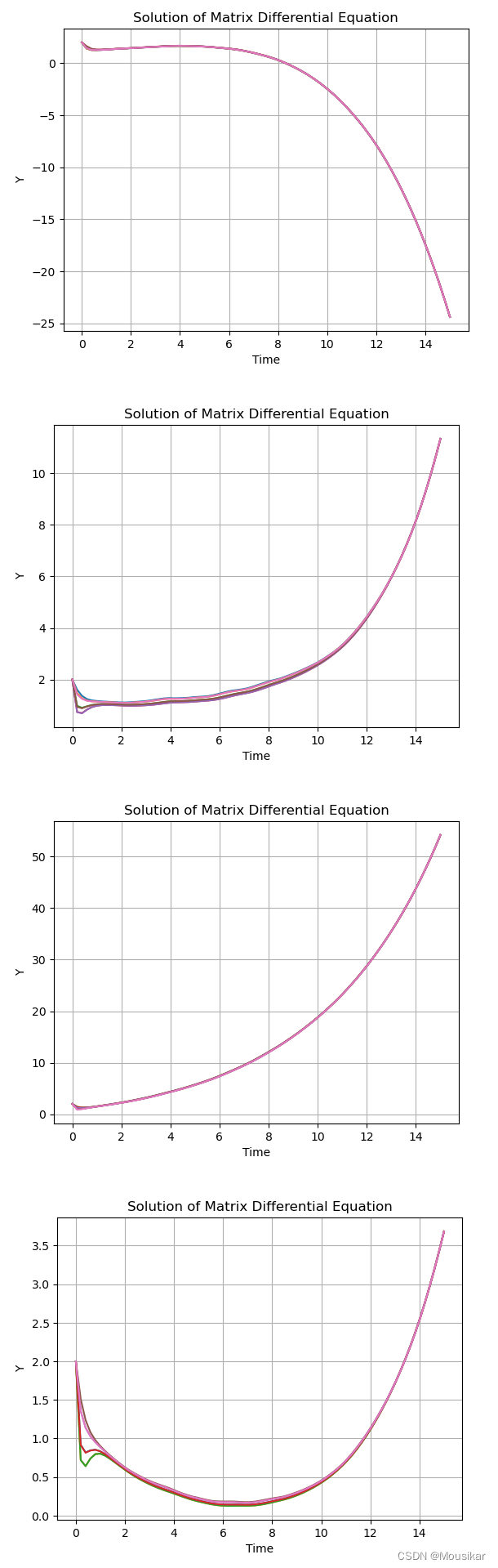
for k in range(n):
for i in range(N):
plt.plot(t, Y[i*n+k,:])
plt.xlabel('Time')
plt.ylabel('Y')
plt.title('Solution of Matrix Differential Equation')
# plt.legend()
plt.grid(True)
plt.show()
得到的结果图如下:
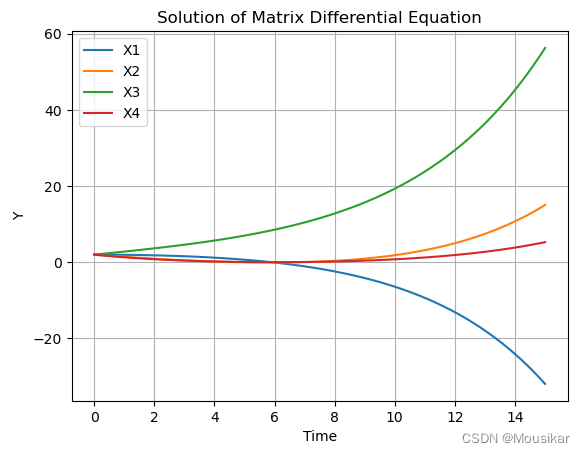
和真实的状态相比较
# 初值
t_sum=15 # 秒
t_span = (0, t_sum) # 时间范围
t = np.linspace(0, t_sum, 77) # 用于绘制的时间点
def origin(tt, X):
dX_dt = np.dot(A, X)#+ wiener_process_fun(tt) # 计算微分方程的导数
return dX_dt
initial_condition = np.array([2, 2, 2, 2]) # 初始条件
solution = solve_ivp(origin, t_span, initial_condition, dense_output=True)
X = solution.sol(t)
plt.plot(t, X[0], label='X1')
plt.plot(t, X[1], label='X2')
plt.plot(t, X[2], label='X3')
plt.plot(t, X[3], label='X4')
plt.xlabel('Time')
plt.ylabel('Y')
plt.title('Solution of Matrix Differential Equation')
plt.legend()
plt.grid(True)
plt.show()
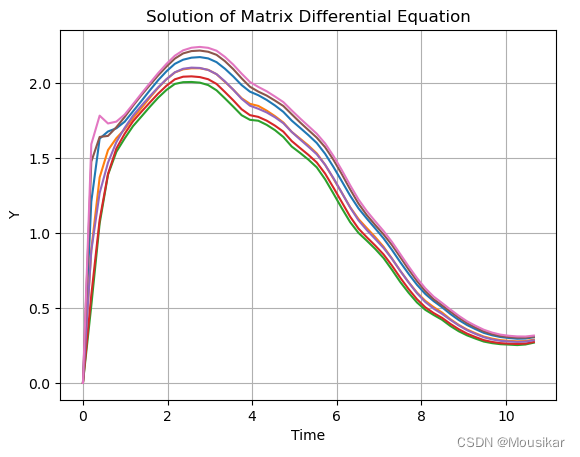
求解均方差
M S E i ( t ) = ∣ ∣ x ( t ) − x ^ i ( t ) ∣ ∣ 2 2 MSE_i(t)=||x(t)-\hat x_i (t)||_2^2 MSEi(t)=∣∣x(t)−x^i(t)∣∣22
MSE=[]
len(Y[i*n+2,:])
len(X[2])
np.mean((Y[i*n+2,:] - X[2]) ** 2)
for j in range(len(X[2])):
temp=[]
for i in range(N):
aaa=np.mean(( X[2,j] - Y[i*n+2,j]) ** 2)
temp.append(aaa)
MSE.append(temp)
len(MSE)
MSE = np.array(MSE)
for i in range(N):
plt.plot(t[:55], MSE[:55,i])
plt.xlabel('Time')
plt.ylabel('Y')
plt.title('Solution of Matrix Differential Equation')
# plt.legend()
plt.grid(True)
plt.show()
源文件可以在这里找到:https://download.csdn.net/download/weixin_45226065/88046590