一、设备需求
硬件:AWR1843BOOST开发板
micro USB线一根
5V/2.5A(电流要求不小于2.5A)电源适配器1个
软件:
1.mmwave Automotive Toolbox(v2.4.5以上)
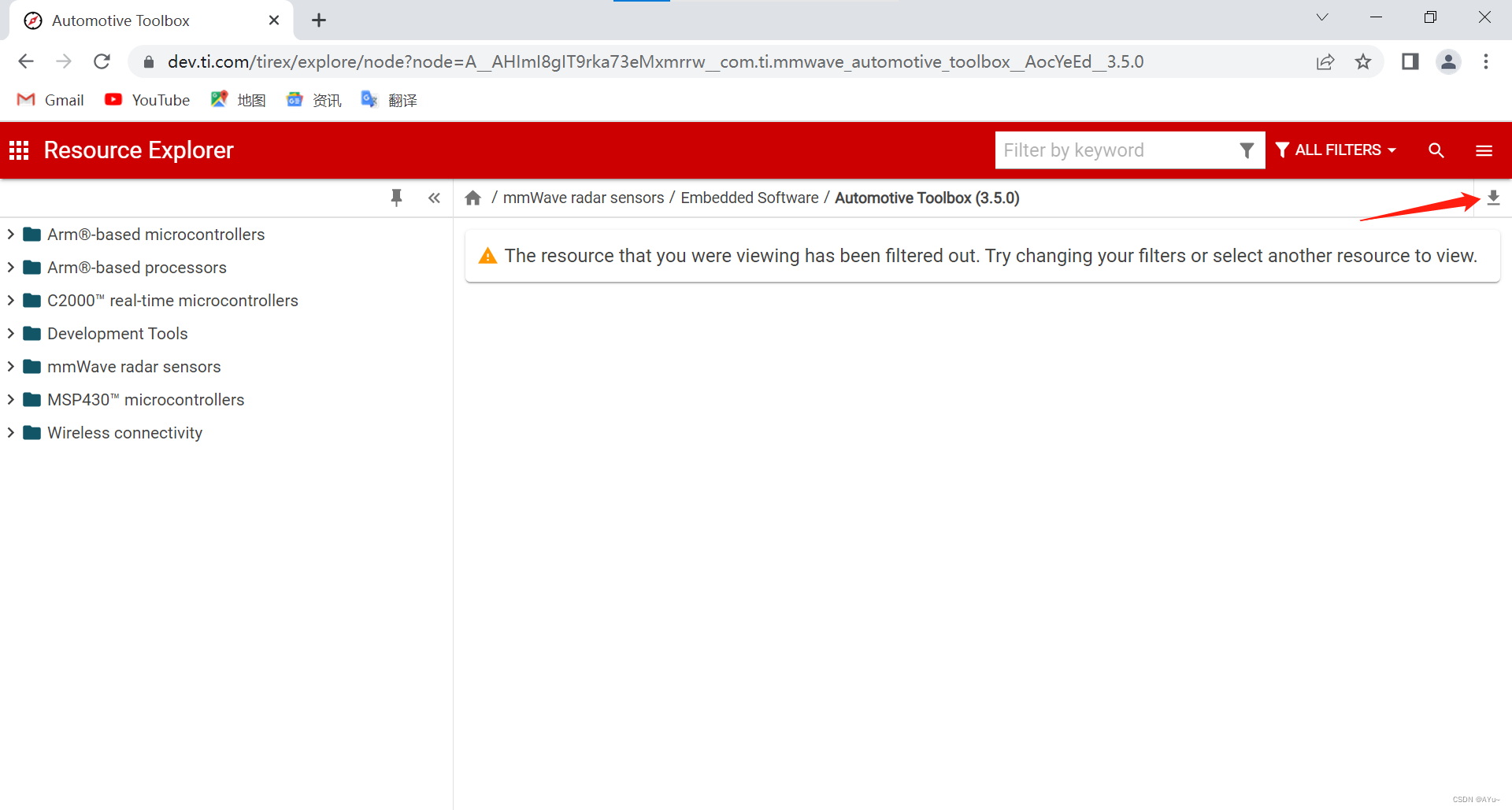
下载地址:(使用谷歌浏览器打开)https://dev.ti.com/tirex/explore/node?node=A__AHImI8gIT9rka73eMxmrrw__com.ti.mmwave_automotive_toolbox__AocYeEd__3.5.0
打开该网址后直接点击右上角的箭头进行下载。

下载完成后解压到任意一个磁盘中即可。
2.MATLAB Runtime(建议下载2017a版本)
下载地址:MATLAB Runtime - MATLAB Compiler - MATLAB
打开网页后下滑找到2017a(9.2)版本进行下载并完成后续安装。

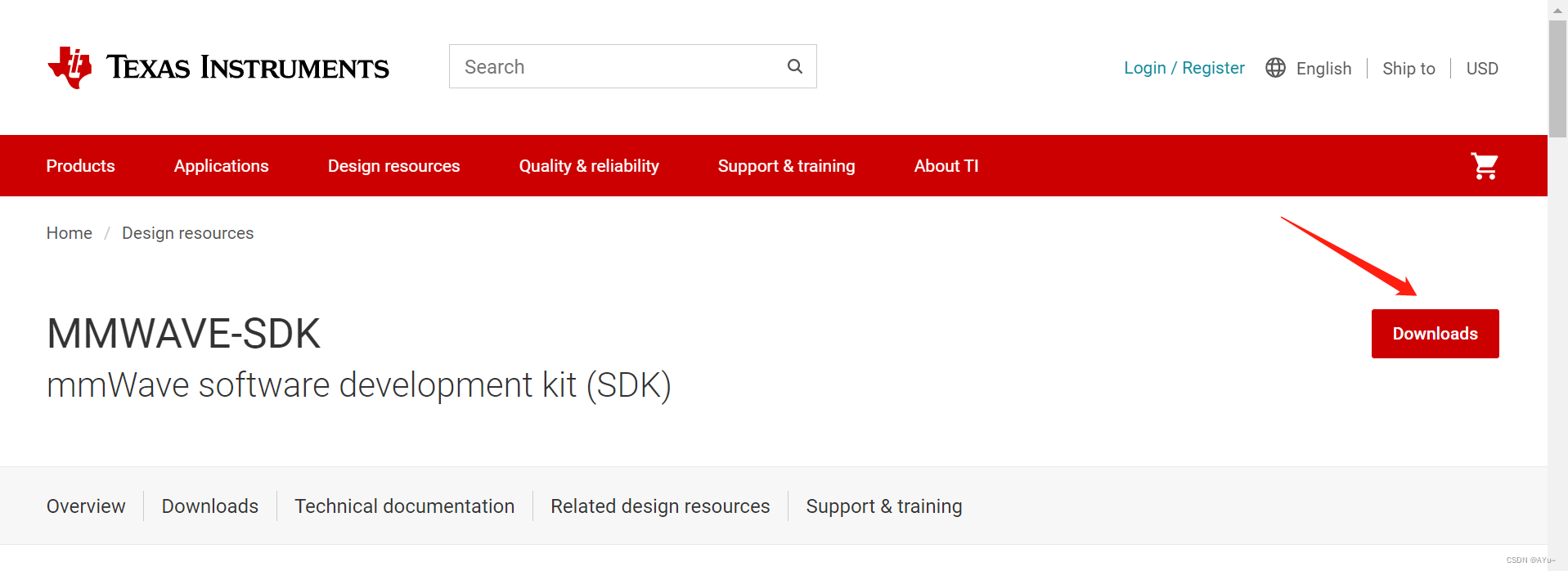
3.TI mmWave SDK(建议下载3.1.0.2版本)
下载地址:MMWAVE-SDK Software development kit (SDK) | TI.com
点击【Downloads】->【Download Options】->【View all versions】


在右侧可以选择所需要的版本进行下载,下载完成后继续完成后续安装。(建议安装到默认目录C:\ti)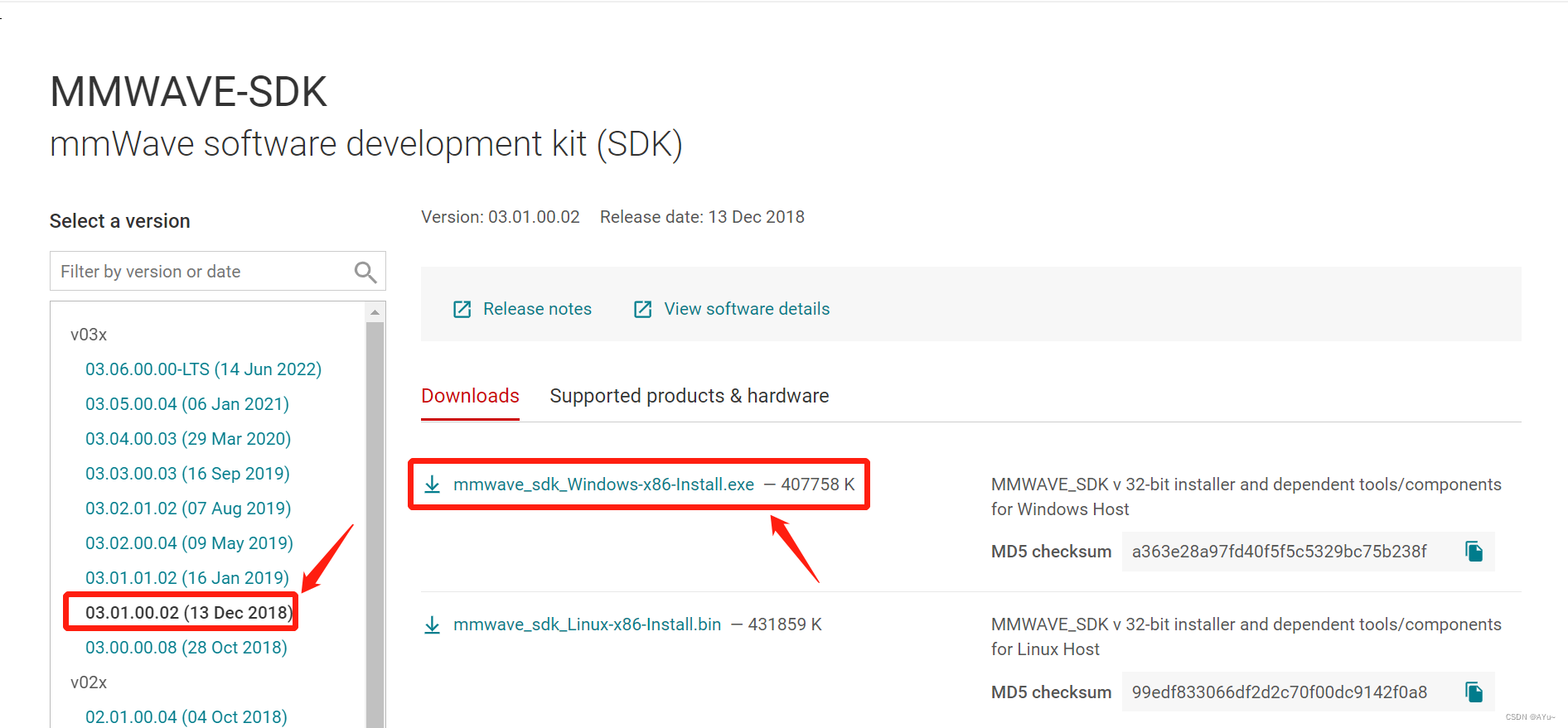
4.TI XDS Emulators Software Package(v6.0.0576.0以上,建议安装v6.0.579.0)
下载地址:XDS Emulation Software (EMUPack) Download
打开网页后下滑找到6.0.579.0版本,点击右侧Windows下载并完成后续安装。

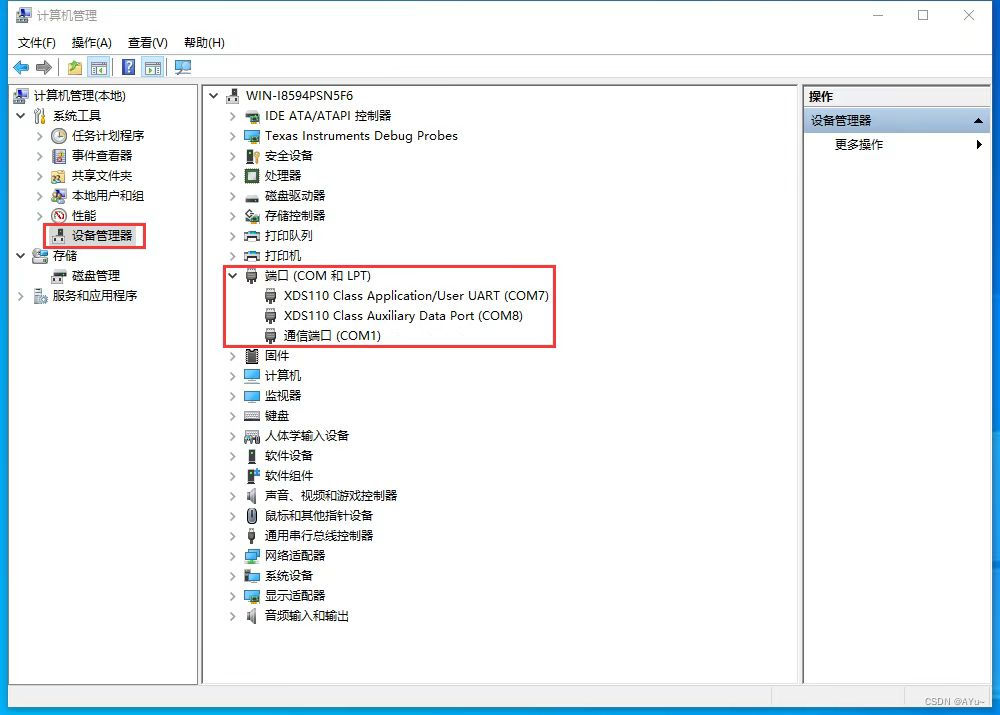
安装完成后将开发板用USB线和电脑相连并接通电源,打开电脑的设备管理器(【此电脑】->右键【管理】->【设备管理器】),在右侧【端口】那里可以看到有两个COM串口即说明安装成功。
5.Uniflash
下载地址:UNIFLASH Software programming tool | TI.com
下载步骤同mmWave SDK,直接下载最新版本即可。下载成功后继续完成后续安装。
二、操作步骤
1.烧写固件
首先,将AWR1843BOOST开发板上的SOP模式设置为【101】,如下图所示,然后连接USB线并接通电源。

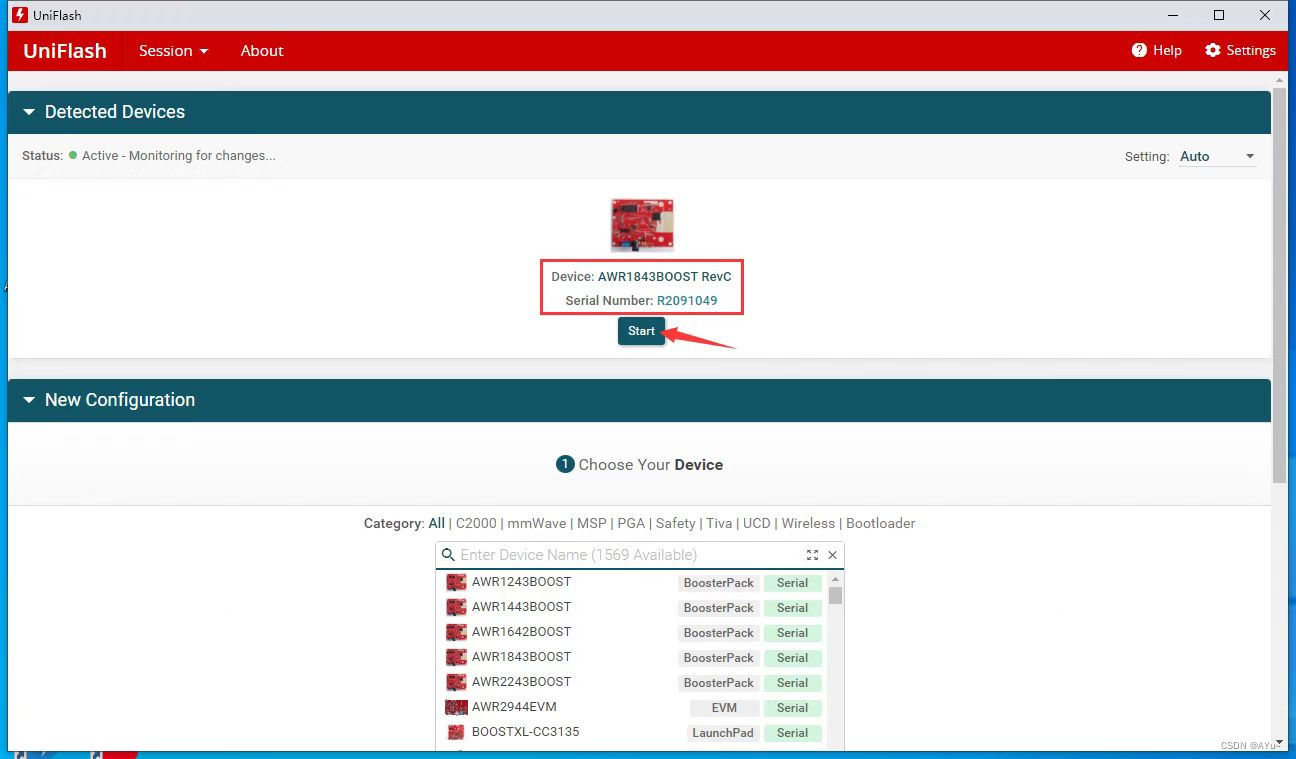
然后打开Uniflash软件,等待其检测出设备后,点击【start】。
点击左侧【Settings&Utilities】,将右侧的COM端口号改为设备管理器中【Application/User UART】所对应的端口号。
再点击左侧【Program】,然后选择右侧的【Browse】进行浏览,在预先下载的【mmwave_automotive_toolbox】->【labs】->【lab0008_automated_parking】->【prebuilt_binaries】中找到【pa_18xx_mss_demo.bin】文件,双击打开。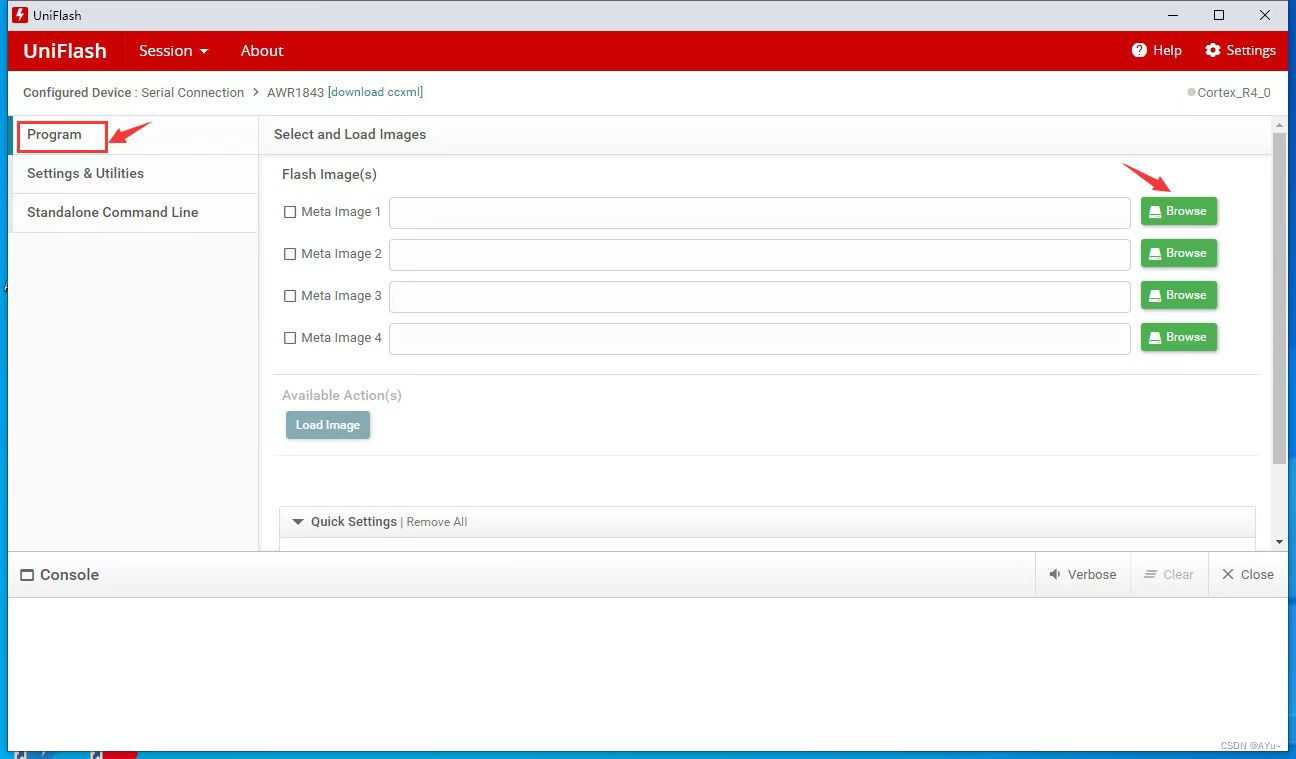
然后点击下方【Load Image】,等待完成后底部会显示SUCCESS,即烧录成功。

2.打开上位机,发送指令
首先切断电源,将SOP模式重新设置为【001】,即将SOP2拨到OFF位置,如下图所示,然后再重新连接电源。

在【mmwave_automotive_toolbox】->【labs】->【lab0008_automated_parking】->【gui】中找到【park_assist_visualizer】,双击打开上位机。
成功打开后显示如图所示,在右侧的【COM Ports】中输入设备管理器中显示的对应的UART和DATA端口号,点击【Connect】,连接成功后会显示【COM STATUS:Ports connected】。然后点击【Start】。
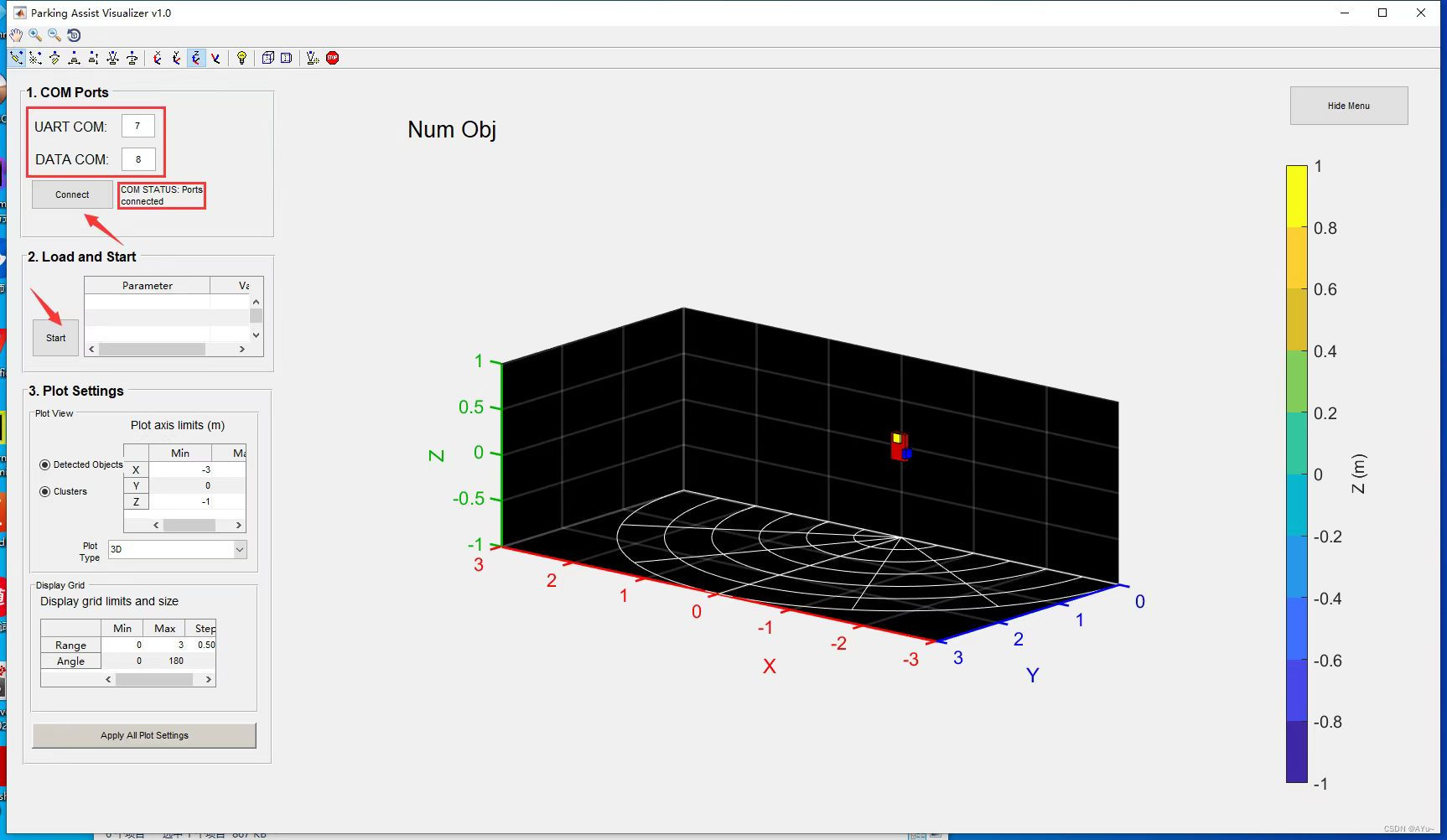
成功开启后,就能在界面中看到检测到的物体的3D框,如下图所示。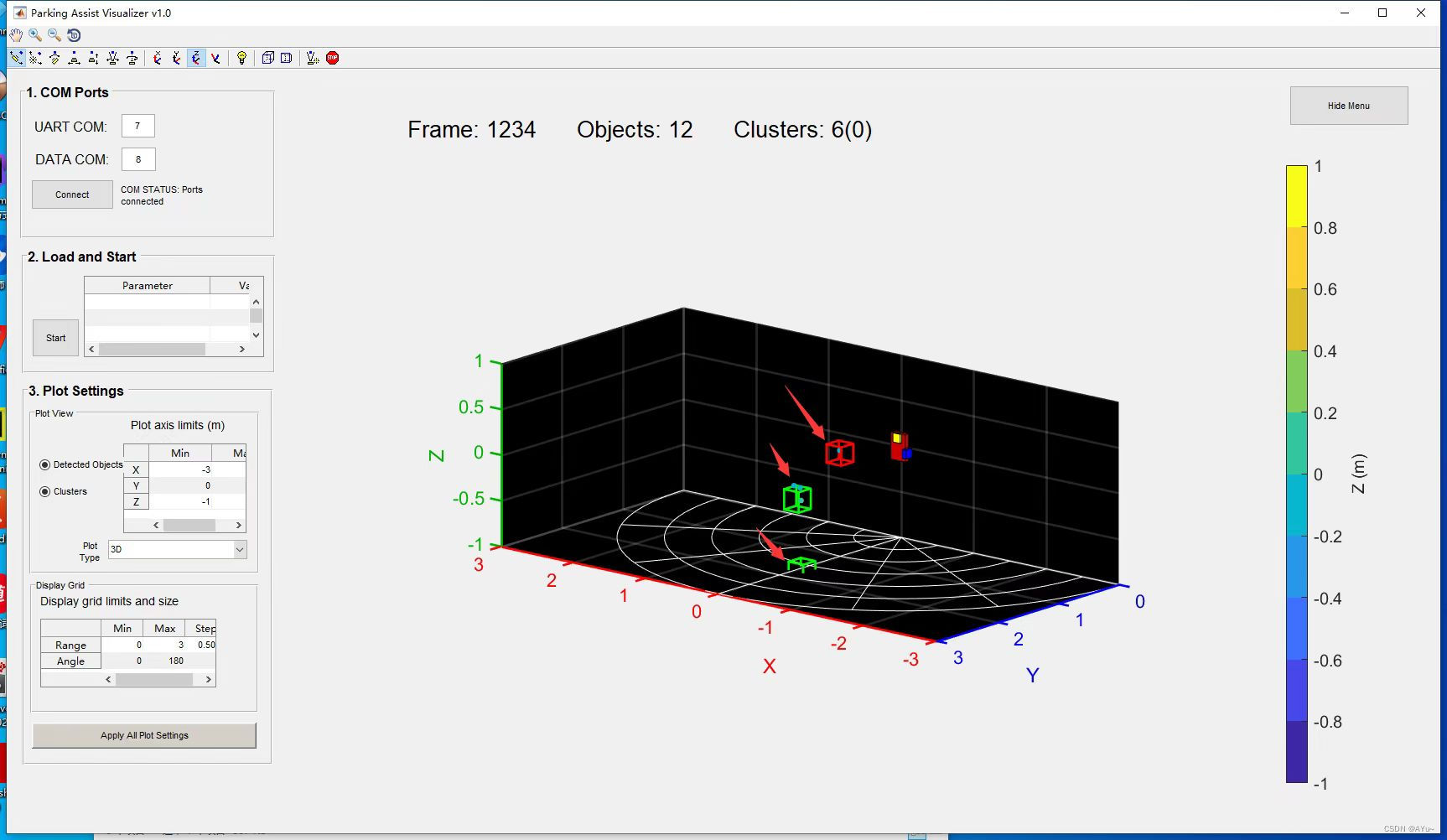
发送的命令如下: