一、动机
本文为了记录最近开发PX4的串口通讯的一些心得。
二、所用设备
PX4-FmuV2、数传平台
PX4固件版本:V1.13.0
使用串口为PX4上的Serial4/5
三、功能实现
从使用STM32的角度来看,主要实现PX4发送数据到PC机,或者实现PC机发送数据到PX4.
代码是参考网上的,主要实现的从PX4发送到PC机,自己做相应的修改可以实现不同的功能。
/**
* @file px4_uorb_subs.c
*/
#include <stdio.h>
#include <termios.h>
#include <unistd.h>
#include <stdlib.h>
#include <string.h>
#include <stdbool.h>
#include <errno.h>
#include <drivers/drv_hrt.h>
#include <systemlib/err.h>
#include <fcntl.h>
#include <systemlib/mavlink_log.h>
#include <px4_platform_common/px4_config.h>
#include <px4_platform_common/tasks.h>
#include <px4_platform_common/posix.h>
#include <unistd.h>
#include <stdio.h>
#include <poll.h>
#include <string.h>
#include <math.h>
static bool thread_should_exit = false; /**< px4_uorb_subs exit flag */
static bool thread_running = false; /**< px4_uorb_subs status flag */
static int rw_uart_task; /**< Handle of px4_uorb_subs task / thread */
static int uart_init(char * uart_name);
static int set_uart_baudrate(const int fd, unsigned int baud);
/**
* daemon management function.
*/
__EXPORT int rw_uart_main(int argc, char *argv[]);
/**
* Mainloop of daemon.
*/
int rw_uart_thread_main(int argc, char *argv[]);
/**
* Print the correct usage.
*/
static void usage(const char *reason);
static void usage(const char *reason)
{
if (reason) {
warnx("%s\n", reason);
}
warnx("usage: px4_uorb_adver {start|stop|status} [-p <additional params>]\n\n");
}
int set_uart_baudrate(const int fd, unsigned int baud)
{
int speed;
switch (baud) {
case 9600: speed = B9600; break;
case 19200: speed = B19200; break;
case 38400: speed = B38400; break;
case 57600: speed = B57600; break;
case 115200: speed = B115200; break;
default:
warnx("ERR: baudrate: %d\n", baud);
return -EINVAL;
}
struct termios uart_config;
int termios_state;
/* 以新的配置填充结构体 */
/* 设置某个选项,那么就使用"|="运算,
* 如果关闭某个选项就使用"&="和"~"运算
* */
tcgetattr(fd, &uart_config); // 获取终端参数
/* clear ONLCR flag (which appends a CR for every LF) */
uart_config.c_oflag &= ~ONLCR;// 将NL转换成CR(回车)-NL后输出。
/* 无偶校验,一个停止位 */
uart_config.c_cflag &= ~(CSTOPB | PARENB);// CSTOPB 使用两个停止位,PARENB 表示偶校验
/* 设置波特率 */
if ((termios_state = cfsetispeed(&uart_config, speed)) < 0) {
warnx("ERR: %d (cfsetispeed)\n", termios_state);
return false;
}
if ((termios_state = cfsetospeed(&uart_config, speed)) < 0) {
warnx("ERR: %d (cfsetospeed)\n", termios_state);
return false;
}
// 设置与终端相关的参数,TCSANOW 立即改变参数
if ((termios_state = tcsetattr(fd, TCSANOW, &uart_config)) < 0) {
warnx("ERR: %d (tcsetattr)\n", termios_state);
return false;
}
return true;
}
int uart_init(char * uart_name)
{
int serial_fd = open(uart_name, O_RDWR | O_NOCTTY);
/*Linux中,万物皆文件,打开串口设备和打开普通文件一样,使用的是open()系统调用*/
// 选项 O_NOCTTY 表示不能把本串口当成控制终端,否则用户的键盘输入信息将影响程序的执行
if (serial_fd < 0) {
err(1, "failed to open port: %s", uart_name);
printf("failed to open port: %s\n", uart_name);
return false;
}
printf("Open the %d\n",serial_fd);
return serial_fd;
}
/**
消息发布进程,会不断的接收自定义消息
*/
int rw_uart_main(int argc, char *argv[])
{
if (argc < 2) {
usage("missing command");
return 1;
}
if (!strcmp(argv[1], "start")) {
if (thread_running) {
warnx("px4_uorb_subs already running\n");
/* this is not an error */
return 0;
}
thread_should_exit = false;//定义一个守护进程
rw_uart_task = px4_task_spawn_cmd("rw_uart",
SCHED_DEFAULT,
SCHED_PRIORITY_DEFAULT,//调度优先级
2000,//堆栈分配大小
rw_uart_thread_main,
(argv) ? (char *const *)&argv[2] : (char *const *)NULL);
return 0;
}
if (!strcmp(argv[1], "stop")) {
thread_should_exit = true;
return 0;
}
if (!strcmp(argv[1], "status")) {
if (thread_running) {
warnx("\trunning\n");
}
else {
warnx("\tnot started\n");
}
return 0;
}
usage("unrecognized command");
return 1;
}
int rw_uart_thread_main(int argc, char *argv[])
{
//char data = '0';
//char out_buf[5]="endl";
//char buffer[5] = "";
/*
* TELEM1 : /dev/ttyS1
* TELEM2 : /dev/ttyS2
* GPS : /dev/ttyS3
* NSH : /dev/ttyS5
* SERIAL4: /dev/ttyS6
* N/A : /dev/ttyS4
* IO DEBUG (RX only):/dev/ttyS0
*/
int uart_read = uart_init("/dev/ttyS6");
if (false == uart_read)
return -1;
if (false == set_uart_baudrate(uart_read, 57600)) {
printf("[JXF]set_uart_baudrate is failed\n");
return -1;
}
printf("[JXF]uart init is successful\n");
//warnx("[rw_uart] starting\n");
thread_running = true;
//write(uart_read, &out_buf[0],4);
char buffer_1[3]="ZGC";
char buffer_2='\n';
while (!thread_should_exit)
{
//read(uart_read, &data, 1);
/*
if (data == 'R') {
for (int i = 0; i < 4; ++i) {
read(uart_read, &data, 1);
buffer[i] = data;
write(uart_read, &buffer[i], sizeof(buffer[i]));
data = '0';
usleep(5000);//5ms pause
}
printf("%s\n", buffer);
}*/
for(int i=0;i<3;i++)
{
write(uart_read,&buffer_1[i],sizeof(buffer_1[i]));
usleep(5000);
}
write(uart_read,&buffer_2,sizeof(buffer_2));
printf("rw_uart TX-test:running!\n");
usleep(1000000);
}
//write(uart_read, &out_buf[0],4);
warnx("[rw_uart] exiting.\n");
thread_running = false;
int fd=close(uart_read);
printf("close stauts: %d\n",fd);
return 0;
}
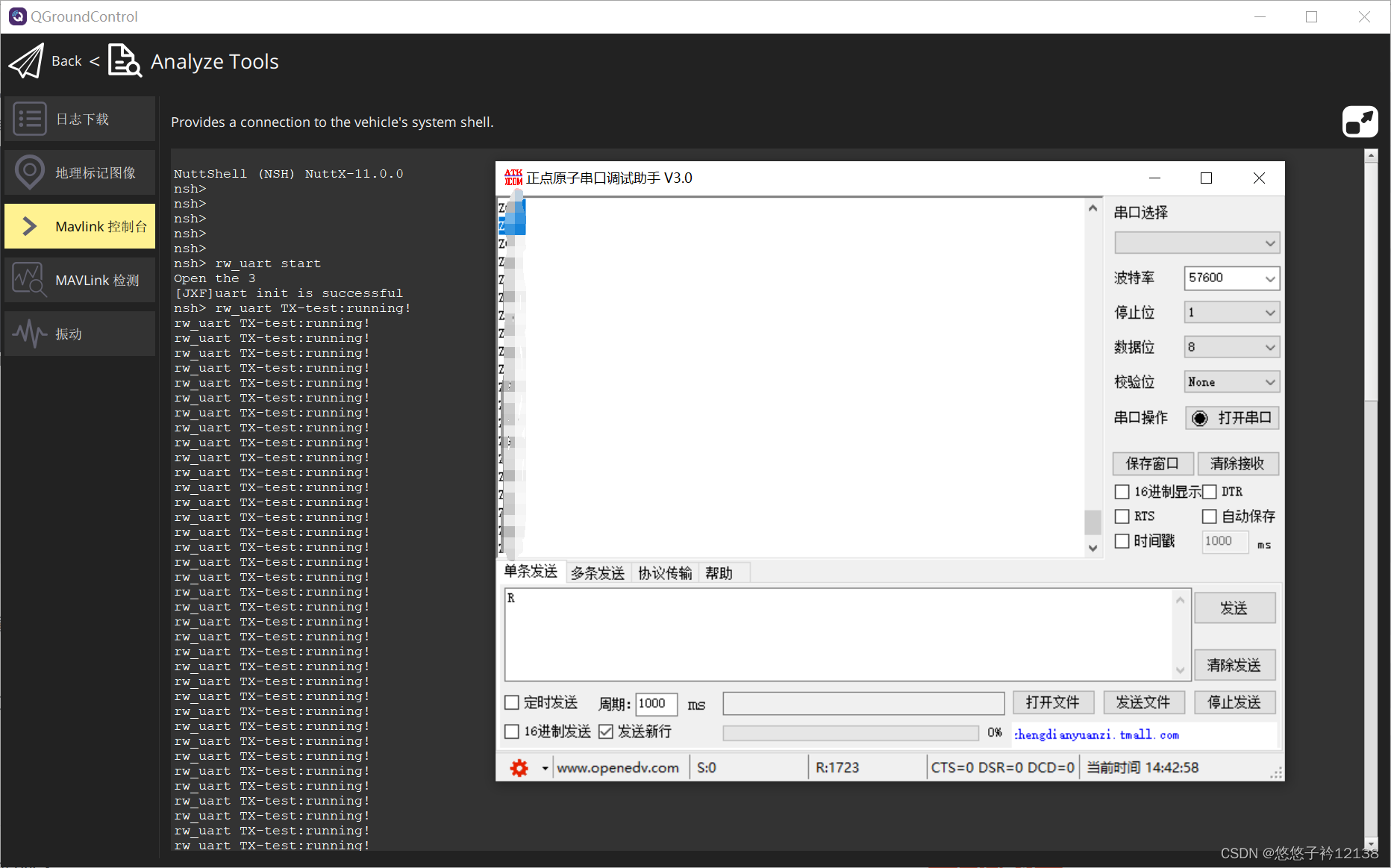
实现效果如下:
主要参考一下博主的:(178条消息) Pixhawk固件PX4之串口通讯_px4与rs422a通讯_廷华电子的博客-CSDN博客