1. 综述
整个LOAM本质就是一个激光里程计,没有闭环检测,也就没有图优化框架在里面,该算法把SLAM问题分为两个算法同时运行,实现实时建图,一个odometry算法,10Hz;另一个mapping算法,1Hz。两个算法都是从点云中提取尖锐的边(sharp edges)和平整表面(planar surface)特征,然后进行feature关联,也就是特征匹配,来估计lidar的运动以及fine match with local map,匹配的过程核心思想还是基于距离的判断,所以我感觉匹配的过程就像是一个基于feature的ICP算法。
2. odometry算法
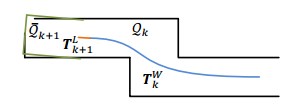
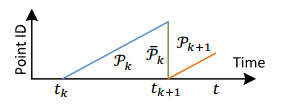
两帧点云之间做处理,将上一帧点云中的所有points投影到同一个时刻tk+1,完成对点云的运动补偿,消除点云畸变,然后与逐渐增长的下一帧点云Pk+1,进行特征匹配,估计lidar的运动,实现里程计功能,最后将Pk+1点云利用估计的运行投影到tk+2时刻。
3. mapping算法
mapping算法就是将已经消除畸变的Pk+1点云与局部地图做match,所谓的局部地图就是在已经匹配好并且转换到全局坐标系下的前10m点云中提取feature。