目录
在计算机视觉和图像处理领域,图像配准和拼接是一项重要的任务,它们允许将多幅图像对齐并融合成一个完整的图像。尤其在无人机、医学图像等领域,图像配准和拼接对于获得高质量的结果至关重要。基于尺度不变特征变换(Scale-Invariant Feature Transform,简称SIFT)算子的图像配准和拼接算法,是一种常用的方法,能够有效地处理图像的尺度、旋转和视角变化。
1.数学公式
SIFT算子通过在图像中检测关键点(特征点)并计算其局部特征描述子来实现图像配准和拼接。关键点检测的数学表示如下:
高斯差分金字塔:$D(x, y, \sigma) = (G(x, y, k\sigma) - G(x, y, \sigma)) * I(x, y)$
其中,$G(x, y, \sigma)$为高斯模糊函数,$k$为尺度因子,$I(x, y)$为图像。
尺度空间极值检测:检测高斯差分金字塔中的极值点,作为关键点。
方向分配:计算关键点的主方向,用于生成描述子。
特征描述子:根据关键点周围的梯度方向,生成局部特征描述子,用于后续的匹配和配准。
2.实现过程
基于SIFT算子的图像配准和拼接算法的实现过程可以概括如下:
图像预处理:将待配准或待拼接的图像进行预处理,包括去噪、尺度变换等。
关键点检测:在预处理后的图像中使用SIFT算子检测关键点,得到关键点的坐标和尺度信息。
特征描述子计算:计算每个关键点的局部特征描述子。
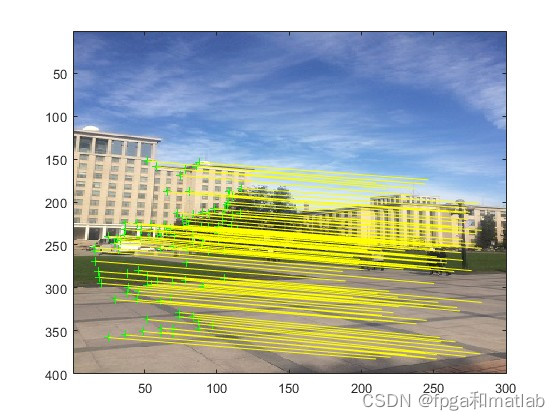
关键点匹配:对两幅图像的关键点进行匹配,可以使用最近邻匹配或其他方法。
配准和拼接:根据匹配的关键点,进行图像的配准和拼接操作。
3.应用领域
基于SIFT算子的图像配准和拼接算法在多个应用领域具有广泛应用,包括但不限于:
遥感图像处理:将多幅卫星或无人机获取的图像配准和拼接,生成更大范围的地图或景象。
医学影像处理:在医学图像中,可以将不同时间或不同成像设备获取的图像配准,用于疾病监测和分析。
计算机辅助设计:将多幅图像拼接成一个更大的图像,用于建模、设计和可视化。
文档扫描和合并:将多个文档图像合并成一个大的图像,用于文档管理和存档。
4.核心程序
.......................................................................
%Use Ransac to get good amount of inliners.
inliners=RANSAC(img_ref,image_cores);
inliners1=RANSAC(img_ref1,image_cores1);
%Find inliner points for the image
[final_inliner_ref,final_inliner_img]=InlierPoint(img_ref,image_cores,inliners);
[final_inliner_ref1,final_inliner_img1]=InlierPoint(img_ref1,image_cores1,inliners1);
%Plot new inliner correspondence
PlotImageCores(final_inliner_ref,final_inliner_img,img1);
PlotImageCores(final_inliner_ref1,final_inliner_img1,img3);
%re-compute the homography using the points.
H_re=computeH(final_inliner_ref,final_inliner_img);
H_re1=computeH(final_inliner_ref1,final_inliner_img1);
%reproject on the image and do the image stitching
final_mosaic=Mosaicing(ref_img2,img1,H_re);
final_mosaic=uint8(final_mosaic);
final_mosaic1=Mosaicing(ref_img2,img3,H_re1);
final_mosaic1=uint8(final_mosaic1);
final_image=Mosaicing(final_mosaic,final_mosaic1,eye(3));
[rowF,colF,K]=size(final_mosaic);
final_image=zeros(rowF,colF,3);
for i=1:rowF
for j=1:colF
for k=1:K
if final_mosaic(i,j,k)>final_mosaic1(i,j,k)
final_image(i,j,k)=final_mosaic(i,j,k);
elseif final_mosaic(i,j,k)<final_mosaic1(i,j,k)
final_image(i,j,k)=final_mosaic1(i,j,k);
elseif final_mosaic(i,j,k)==final_mosaic1(i,j,k)
final_image(i,j,k)=final_mosaic(i,j,k);
end
end
end
end
figure;
imshow(uint8(final_image),'InitialMagnification','fit');
title('全景图');
for i=1:3
% 高斯函数的频域低通滤波,以提高图像光滑度
% 生成sigma=200的高斯函数
ff = creat_gauss(final_image(:,:,i),300);
% 频域低通滤波
out = lowpass_freq_filt(final_image(:,:,i), ff);
final_image(:,:,i)=out;
end
figure;
imshow(uint8(final_image),'InitialMagnification','fit');
title('频域低通滤波后的全景图');
up21865.仿真结果

6.参考文献
Lowe, D. G. (2004). Distinctive image features from scale-invariant keypoints. International Journal of Computer Vision, 60(2), 91-110.
Brown, M., & Lowe, D. G. (2007). Automatic panoramic image stitching using invariant features. International Journal of Computer Vision, 74(1), 59-73.
Ma, J., Luo, X., Xu, M., & Wang, S. (2017). A survey of keypoint-based image stitching algorithms. The Visual Computer, 33(12), 1593-1604.
Walas, K., & Forczmański, P. (2019). A review of image stitching algorithms for handheld digital cameras. Journal of Real-Time Image Processing, 16(6), 2201-2220.
Yu, L., Zhu, X., & Gao, H. (2020). Key technologies and applications of image stitching: a survey. Multimedia Systems, 26(4), 393-414.