1 资料
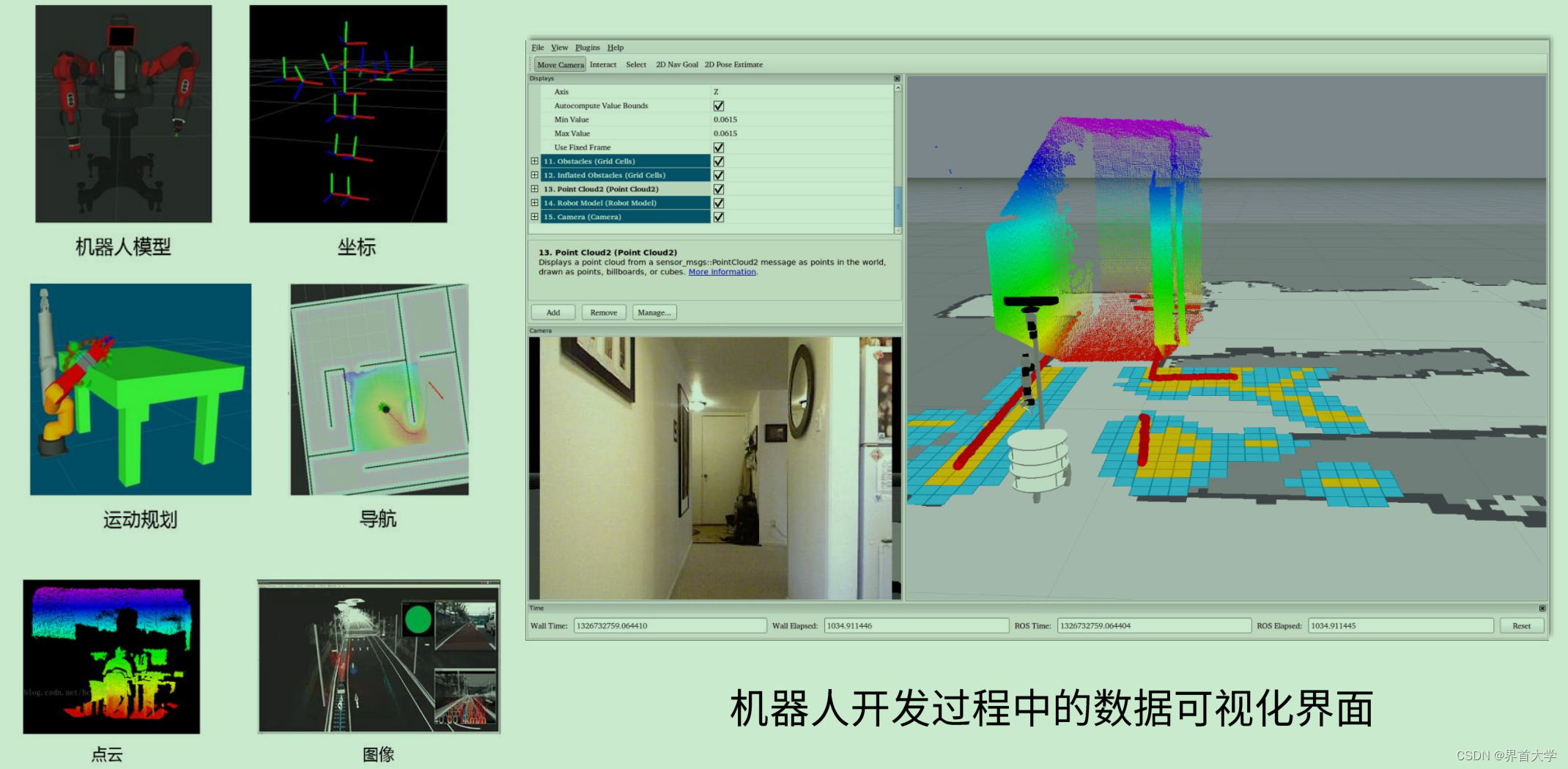
在 ROS高效入门第二章 – 基本概念和常用命令学习,基于小乌龟样例 里,我们学习了几个 rqt 相关的可视化工具,如:rqt_console,rqt_graph,rqt_plot。但是 ros 提供的最强的可视化工具是 rviz,算法相关的几乎所有数据,都能可视化显示出来。
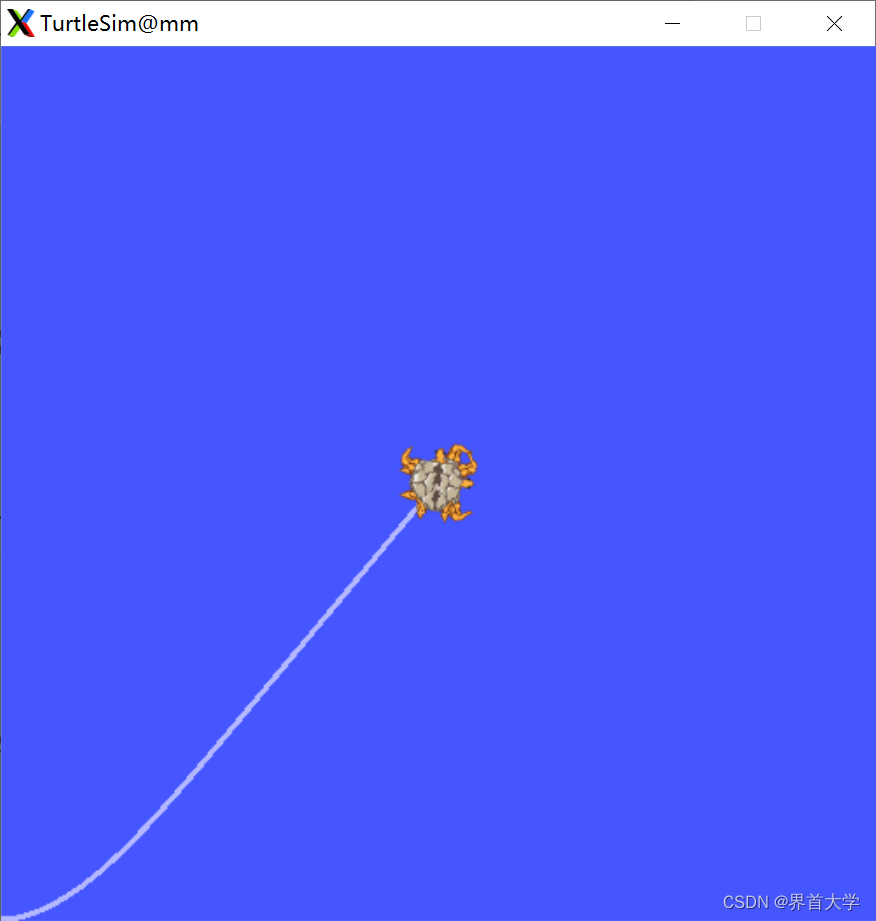
在 TF坐标变换 系列第一篇文章中,我们使用了 rviz 可视化显示 ros 自带的 turtle_tf 样例,本文我们使用 rviz,可视化显示自己编写的 tf 样例,从而掌握 rviz 的基本用法,本文参考资料如下:
(0)ROS高效进阶第一章 – ROS高级组件之 TF坐标变换 其一
(1)ROS高效进阶第一章 – ROS高级组件之 TF坐标变换 其二
(2)[ROS探索总结-55.Rviz三维可视化平台(https://www.ncnynl.com/archives/201902/2836.html)
(3)《ROS机器人开发实践》胡春旭 第4章第4节
2 正文
(1)编译运行 learning_tf,代码在:learning_tf
cd ~/catkin_ws/
catkin_make --source src/learning_tf
source devel/setup.bash
roslaunch learning_tf start_cpp.launch
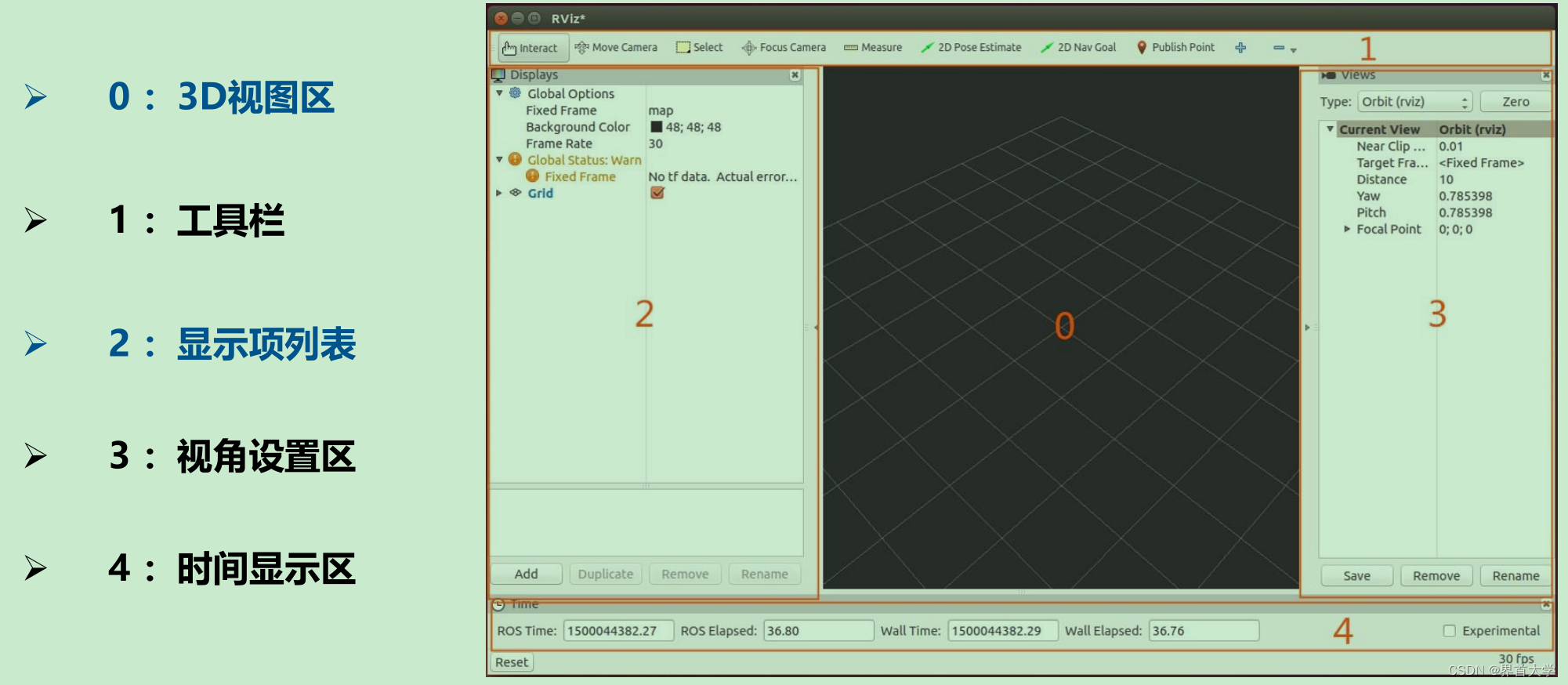
(2)启动rviz,解释五个工作区
rosrun rviz rviz
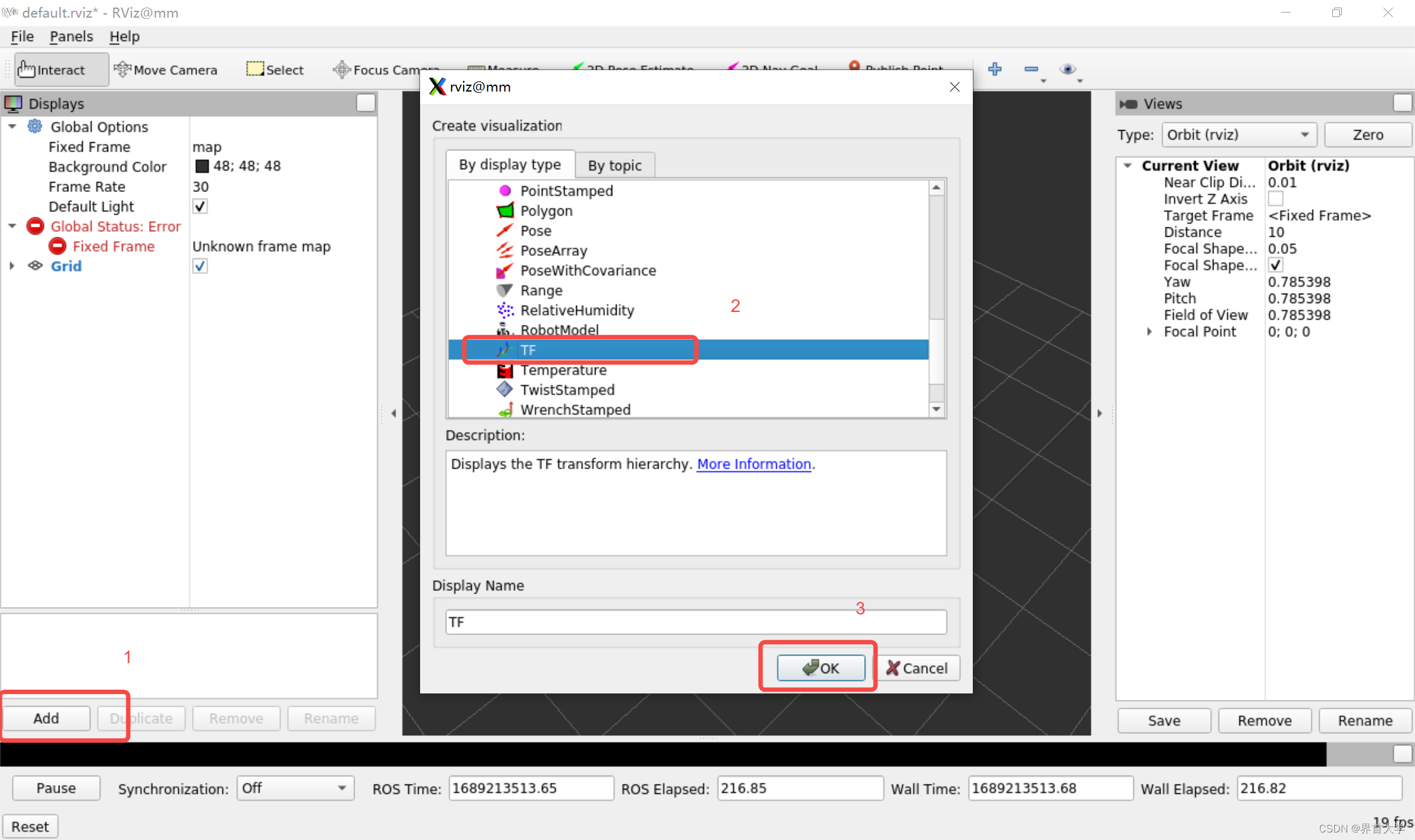
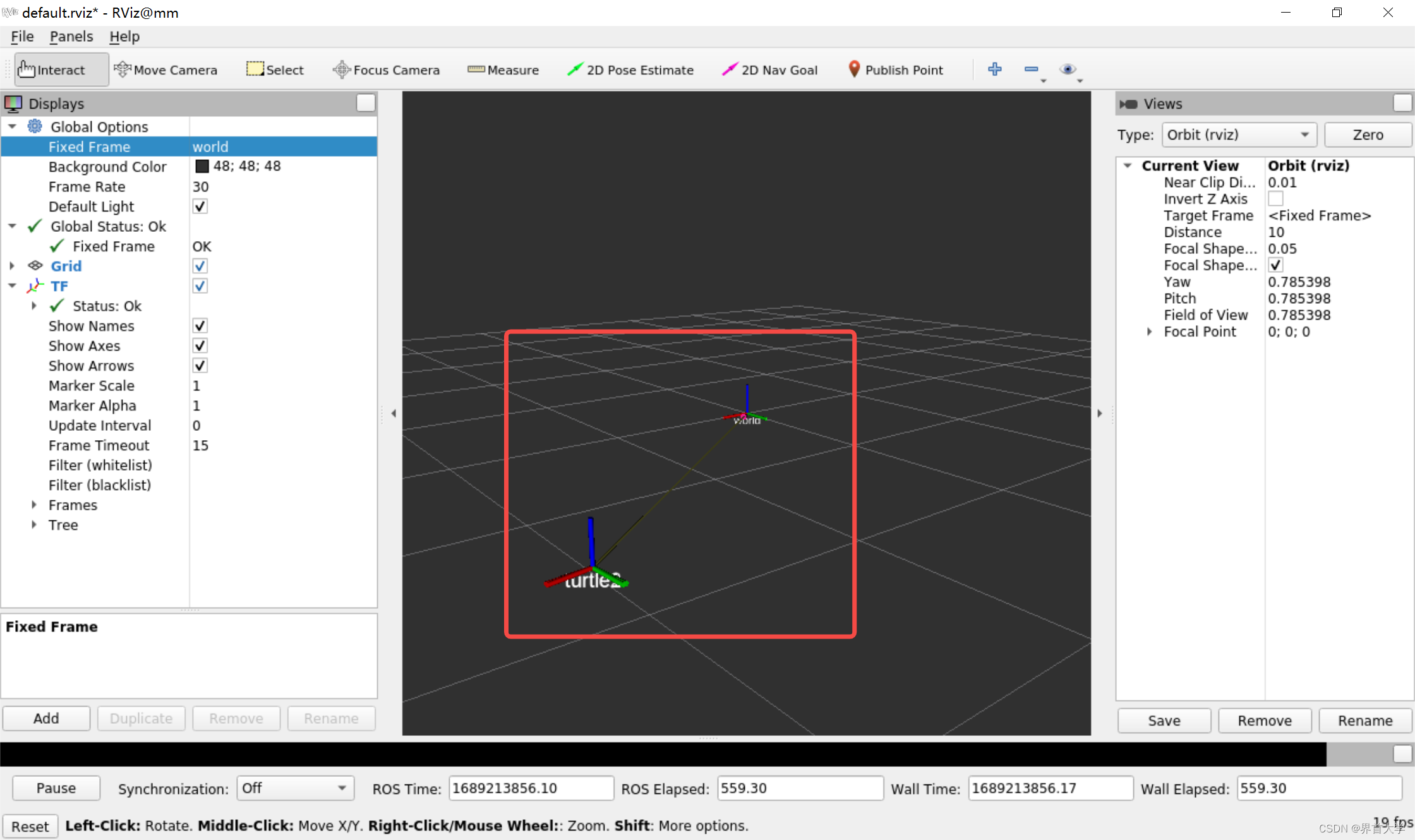
(3)在 rviz 界面添加 TF 数据
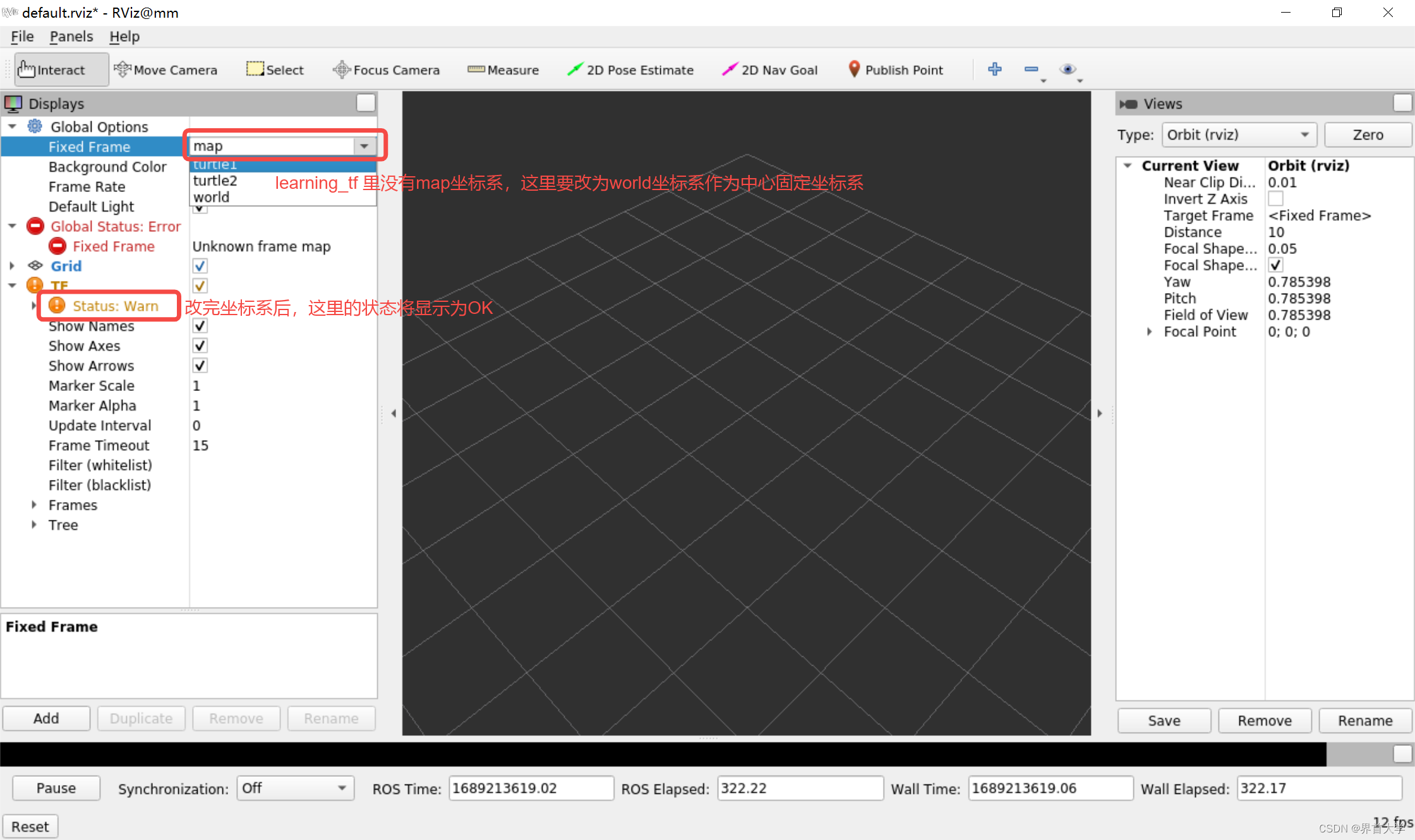
使用键盘控制乌龟时,这里的坐标系就会跟着动
3 总结
rviz 的使用大概就是这样,通过add按钮添加想要的,然后把状态信息调成OK,然后就可以显示了。不同于 TF 数据,一般情况下,"Topic“属性较为重要。
除了这些基本工具,rviz也支持自定义插件扩展,用户可以利用rviz 打造自己的交互界面,这里暂时不深入,具体见:ROS探索总结-34.rviz plugin