| 文件状态: 【√】草稿 【】正式发布 【】正在修改 |
| 文件起草分工 撰写: 审核: |
| 编制: |
签名: |
日期: |
| 审核: |
签名: |
日期: |
| 批准: |
签名: |
日期: |
| 版本 |
更改描述 |
更改日期 |
更改人 |
目录
3.1.17 目标改变控制-新目标切入前目标后方... 47
3.1.18 目标改变控制-目标侧向切出侧方车道... 48
3.1.19 目标改变控制-目标侧向切出,前方出现新目标车辆... 49
3.1.20 目标改变控制-目标车辆切出驶入匝道... 50
3.2.2 其他工况-巡航设置车速高于地图信息(参考线)的限速... 63
3.2.3 其他工况-巡航设置车速低于地图信息(参考线)的限速... 63
3.2.4 其他工况-巡航设置车速高于TSR检测限速... 64
3.2.5 其他工况-巡航设置车速低于TSR检测限速... 65
3.2.6 其他工况-目标车速高于地图信息(参考线)的限速... 65
3.2.7 其他工况-目标车速低于地图信息(参考线)的限速... 66
3.2.8 其他工况-目标车速高于TSR检测限速... 67
3.2.9 其他工况-目标车速低于TSR检测限速... 67
3.2.10 其他工况-地图信息(参考线)的限速高于TSR检测限速 68
3.2.11 其他工况-限速过程中地图信息(参考线)丢失... 69
概述
本文档的目的是描述自适应巡航(Adaptive Cruise Control, ACC)功能的技术规范和设计说明。
| 辅助驾驶功能 |
缩写 |
英文名 |
| 自适应巡航 |
ACC |
Adaptive Cruise Control |
| 前方碰撞预警 |
FCW |
Forward Collision Warning |
| 车道居中保持 |
LCC |
Lane Center Control |
| 车道偏离预警 |
LDW |
Lane Departure Warning |
| 前方慢车提醒 |
LSW |
Front Low Speed Object Warning |
自适应巡航功能(ACC,Adaptive Cruise Control),是一项驾驶辅助功能,有目标车辆时,按照驾驶员设定的跟车模式稳定跟随前车行驶;无目标车辆时,按照驾驶员设定的巡航车速,保持恒定车速行驶。另外,驾驶员也可以根据个人需要随时干预车辆,主动操控车速和跟车距离。但ACC绝对不等于自动驾驶。
| 序号 |
项目 |
设定值 |
单位 |
备注 |
| 1 |
工作车速范围 |
km/h |
可根据具体车型调整 |
|
| 2 |
最大起效车速 |
km/h |
||
| 3 |
最大失效车速 |
km/h |
||
| 4 |
设定巡航车速 |
km/h |
||
| 最大加速度 |
m/s2 |
|||
| 最大减速度 |
m/s2 |
|||
| 5 |
最小转弯半径 |
m |
||
| 6 |
跟车时距 |
s |
ACC 跟车控制的稳态跟车时距,安全考虑,跟车时距大于乘用车 |
|
| 7 |
目标识别距离区间 |
m |
||
| 8 |
目标识别速度区间 |
km/h |
||
| 9 |
自动跟停距离 |
m |
||
| 10 |
ACC _SetSpeed_Min |
km/h |
ACC 最小设定巡航车速 |
|
| 11 |
ACC _SetSpeed_Max |
km/h |
ACC 最大设定巡航车速 |
|
| 12 |
ACC _SetSpeed_StepS |
km/h |
ACC 巡航车速调节步长(短按) |
|
| 13 |
ACC _SetSpeed_StepL |
km/h |
ACC 巡航车速调节步长(长按) |
|
| 14 |
ACC _SetSpeed_TLongPress |
ms |
ACC 巡航车速调节长按时间阈值 |
|
| 15 |
ACC _SetSpeed_TShortPress |
ms |
ACC 巡航车速调节短按时间阈值 |
| 关键项 |
指标要求 |
| 接管率 |
|
| 速度跟踪精度 |
|
| 距离跟踪精度 |
说明:本章节中描述为“感知系统需…”的部分为自研传感器组+感知融合的需求,车辆本身速度、载重等的需求描述为“底盘系统需…”。
-
-
- Sensor Fusion需求
- 接口需求
- Sensor Fusion需求
-
参考《SensorFusionInterface_UDP.xlsx》
-
-
-
- 目标检测需求
-
-
- 感知系统需至少输出本车周围50个目标的信息,覆盖本车前方、相邻车道前方、相邻车道侧方、相邻车道后方、本车后方等区域
-
-
-
- 目标检测区域需求
-
-
-
- 本车前方区域
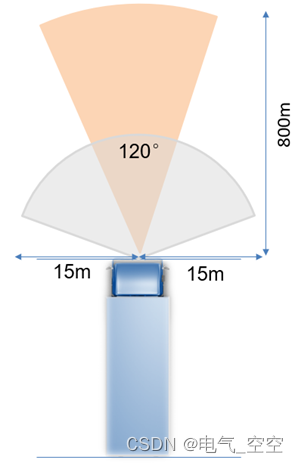
- 感知系统需发送本车前方目标的横向/纵向距离
- 感知系统的纵向检测距离需达到800m,检测精度需<0.2m
- 感知系统的横向检测距离范围为-15m~15m,检测精度需<0.1m
- 感知系统的角度(方位角、航向角等)检测精度需<0.1°
- 感知系统需要检测并识别通过国家认证的允许在高速公路行驶的各类车辆,包括小客车、卡车、中大客车、摩托车和其他异形车辆等
- 感知系统需检测并识别道路上可能出现的VRU,包括成人、小孩、自行车、大型动物等
- 感知系统需检测并识别道路上可能出现的障碍物,包括锥桶、警示柱、水马、不规则物体和坑洼等