任务

图1 任务内容
要求
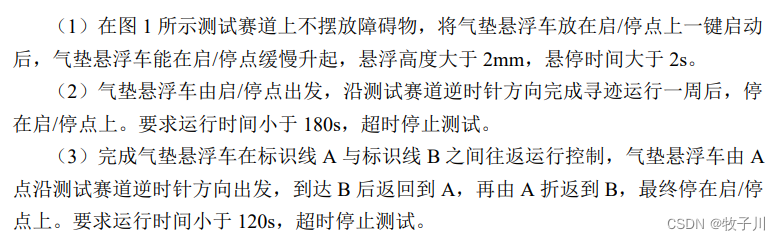 图2 基本要求内容
图2 基本要求内容
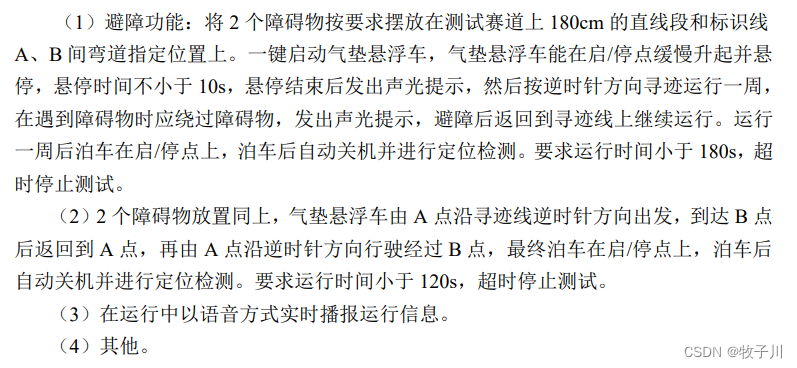
图3 发挥部分内容
说明
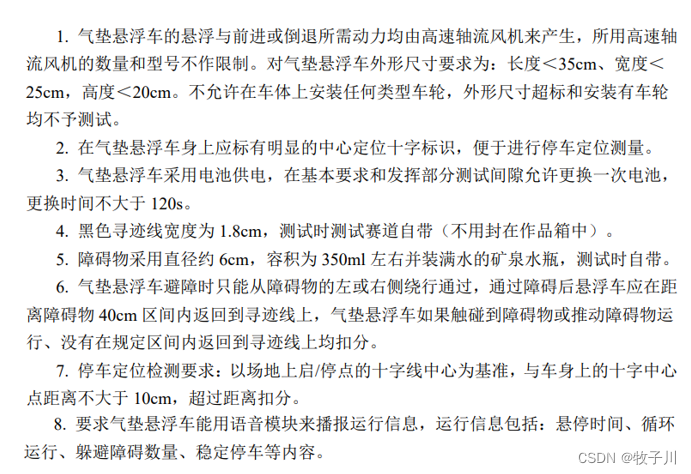
图4 说明内容
评分标准
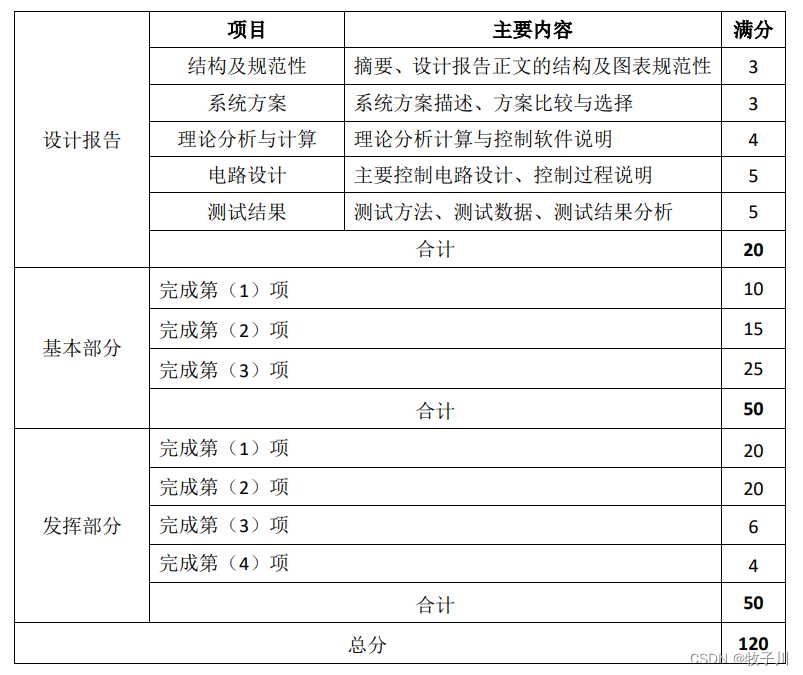
图5 评分内容
正文 (部分)
摘要
本实验是一辆气垫悬浮车,采用高速轴流风机驱动。通过使用STM32F103作为主控,L293D电机驱动芯片作为驱动模块,实现车辆的悬浮和运动控制。实验任务包括测试赛道上的悬浮和寻迹运行,以及避障功能和语音播报运行信息的发挥部分。基本要求包括启动后车辆缓慢升起并悬停,完成逆时针寻迹运行一周,并往返于标识线A和B之间。发挥部分要求车辆避开障碍物进行寻迹运行,并在遇到障碍物时发出提示,最终停车并进行定位检测。实验说明中对气垫悬浮车的外形尺寸、电池更换时间、寻迹线宽度等做出了详细规定。
关键词:气垫悬浮车、高速轴流风机、STM32F103、L293D、寻迹运行、避障、语音播报
1.系统方案
本设计以STM32芯片为主控,整体系统主要由主控、驱动模块和悬浮模块组成。
1.1 主控模块的论证与选择
方案一:选用STM32F103主控
优点:成本低、性能稳定、有丰富的开发资源和支持
缺点:存储容量较小
方案二:选用STM32F407主控
优点:存储容量大、性能强劲、支持更多外设接口
缺点:成本较高
方案三:选用STM32H7主控
优点:高性能、丰富的存储容量、支持多媒体处理等功能
缺点:价格较高
综上所述,方案一最合理,原因为成本低、性能稳定,而且有丰富的开发资源和支持。
1.2 硬件控制方案的论证与选择
方案一:使用L293D电机驱动芯片搭建系统,采用以下硬件模块实现功能
气垫悬浮模块:包括高速轴流风机、压力传感器和控制电路等
驱动模块:包括电机驱动模块和传感器模块等
方案二:使用TB6612FNG电机驱动芯片搭建系统,采用以下硬件模块实现功能
气垫悬浮模块:包括高速轴流风机、压力传感器和控制电路等
驱动模块:包括电机驱动模块和传感器模块等
方案三:使用DRV8833电机驱动芯片搭建系统,采用以下硬件模块实现功能
气垫悬浮模块:包括高速轴流风机、压力传感器和控制电路等
驱动模块:包括电机驱动模块和传感器模块等
综上所述,方案一最合理,原因为成本低,适用于小型的气垫悬浮车系统。
2.3 控制过程说明
实现气垫悬浮车的悬浮和运动需要使用STM32F103作为主控,使用L293D电机驱动芯片作为驱动模块控制气垫悬浮模块。具体的控制过程如下:
启动:按下启动按钮后,通过STM32F103控制L293D电机驱动芯片,使风机工作,产生气流实现悬浮。
运动控制:通过调整风机的输出力和控制轮速来控制气垫悬浮车的前进、后退和转弯。
寻迹控制:使用传感器检测寻迹线,根据检测结果控制气垫悬浮车沿着寻迹线行驶。
避障功能:使用传感器检测障碍物,当气垫悬浮车接近障碍物时,通过调整风机的输出力和控制轮速,实现绕过障碍物并返回到寻迹线上继续运行。
停车定位检测:使用传感器检测停车位置,根据检测结果调整风机的输出力和控制轮速,实现稳定停车在指定位置。
4.测试方案与测试结果
4.1 测试方案
4.1.1 功能测试
(1)悬浮高度测试
1、将气垫悬浮车放在启/停点上,一键启动,观察悬浮高度是否大于2mm。
2、记录悬浮时间,判断是否大于2s。
(2)寻迹运行测试
1、从启/停点出发,沿测试赛道逆时针方向运行,观察运行时间是否小于180s。
2、完成一周后,停在启/停点上。
(3)往返运行测试
1、从 A 点出发,沿测试赛道逆时针方向到达 B 点,再返回 A 点。
2、观察运行时间是否小于120s,超时停止测试。
(4)避障功能测试
1、在测试赛道上摆放两个障碍物,观察气垫悬浮车是否能避开障碍物并继续运行。
2、观察运行时间是否小于180s,超时停止测试。
(5)语音播报测试
1、观察气垫悬浮车能否以语音方式实时播报运行信息。
2、检查运行信息的准确性和完整性。
该文档给出的是部分内容,想要完整文档的可以通过百度网盘获取。
通过百度网盘分享的文件:https://pan.baidu.com/s/1aXzYwLMLx_b59abvplUiYw?pwd=dn71
提取码:dn71
复制这段内容打开「百度网盘APP 即可获取」
硬性的标准其实限制不了无限可能的我们,所以啊!少年们加油吧!