复现概要
按照GitHub上面的markdown文档,搭建FAST_LIO环境并进行Rosbag Example验证的整个过程的简单记录。
相关代码和数据下载
url: https://pan.baidu.com/share/init?surl=3wPb34JGQc0RMR_UNKVNCA
pwd: 41qs
环境搭建
参考https://github.com/hku-mars/FAST_LIO
- Livox-sdk
- livox_ros_driver
- FAST_LIO
运行demo
简要说明
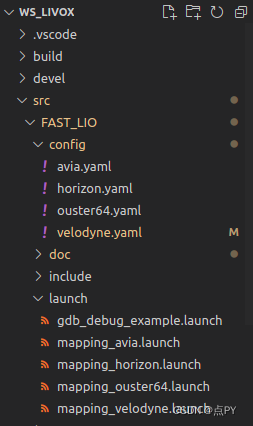
前面说过,fast_lio是一种里程计算法,他可以根据输入的传感器的数据,输出机器人的里程计信息等。如下图所示,fast_lio文件下的launch文件夹下,共计有四种雷达的launch文件,分别为avia、horizon、outer64、velodyne,其config文件下为这四种雷达的yaml配置文件。
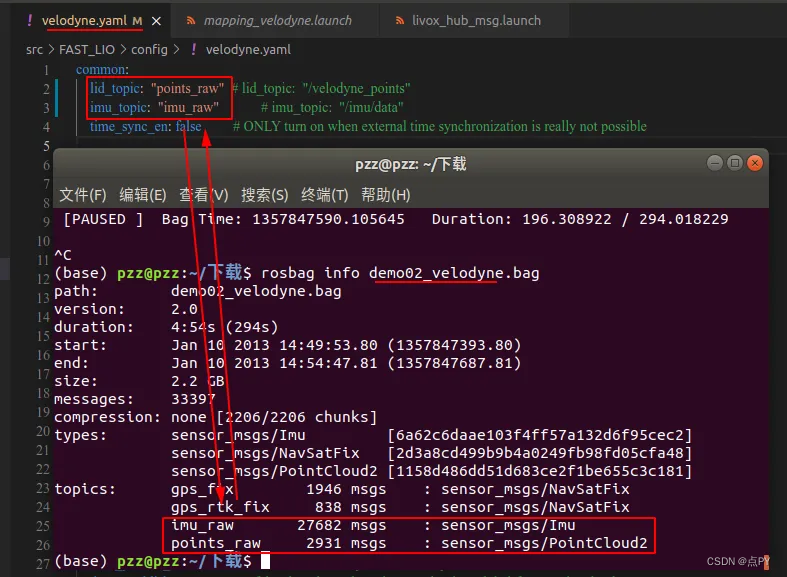
而我们下面即将进行的rosbag example,其实就是先启动对应的launch文件,然后再rosbag play bag文件,利用bag文件中的数据,模拟传感器发送给fastlio的数据。其中的bag文件中,包含了对应的传感器的数据,而要保证bag文件中的数据能够正确的发送给fastlio,我们还需确保对应的雷达配置文件中的 topic 与 bag文件中数据的topic一致。
如下图velodyne雷达配置文件与bag数据文件,二者一致。
如果不一致,rviz中就不会有任何反应。
Velodyne Rosbag TEST
在启动mapping_velodyne.launch文件之前,务必需要先确认一下velodyne雷达配置文件中的 topic 与 bag文件中数据的topic是否一致。确认一致之后,再roslaunch对应的launch文件。
roslaunch fast_lio mapping_velodyne.launch
然后,在bag数据包存放位置打开终端,开始播放数据。之后,rviz中就会有一系列的数据点的显示了。
rosbag play YOUR_DOWNLOADED.bag
rosbag play demo01_velodyne.bag
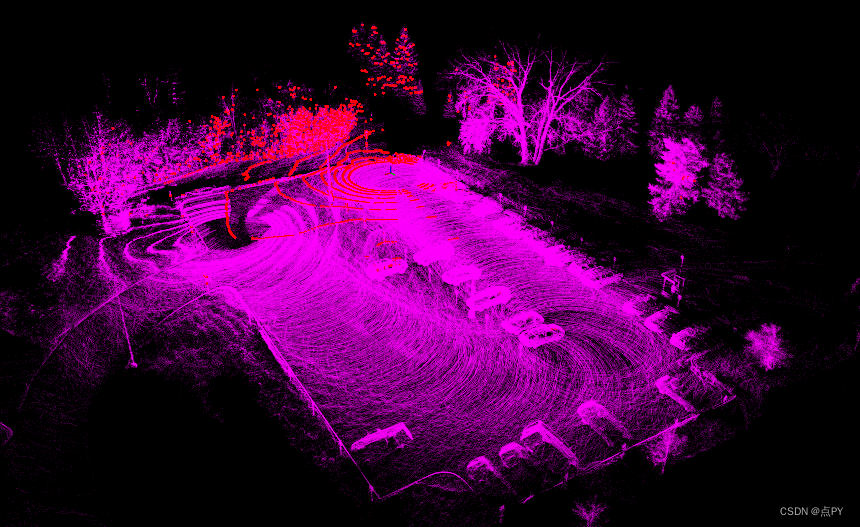
预览建图效果
pcl_viewer xxxxxx.pcd
里程计话题发布
https://zhuanlan.zhihu.com/p/492496857