一、安装和测试
1、下载资源包
mkdir -p ~/turtlebot3_ws/src/
cd ~/turtlebot3_ws/src/
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git如果超时,可以在window下面用ssh连接虚拟机进行下载
2、编译
cd ~/turtlebot3_ws
catkin_make3、启动仿真环境,并打开RVIZ
export TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_fake turtlebot3_fake.launch 4、新建Terminal(Ctrl+Shft+T),打开键盘控制
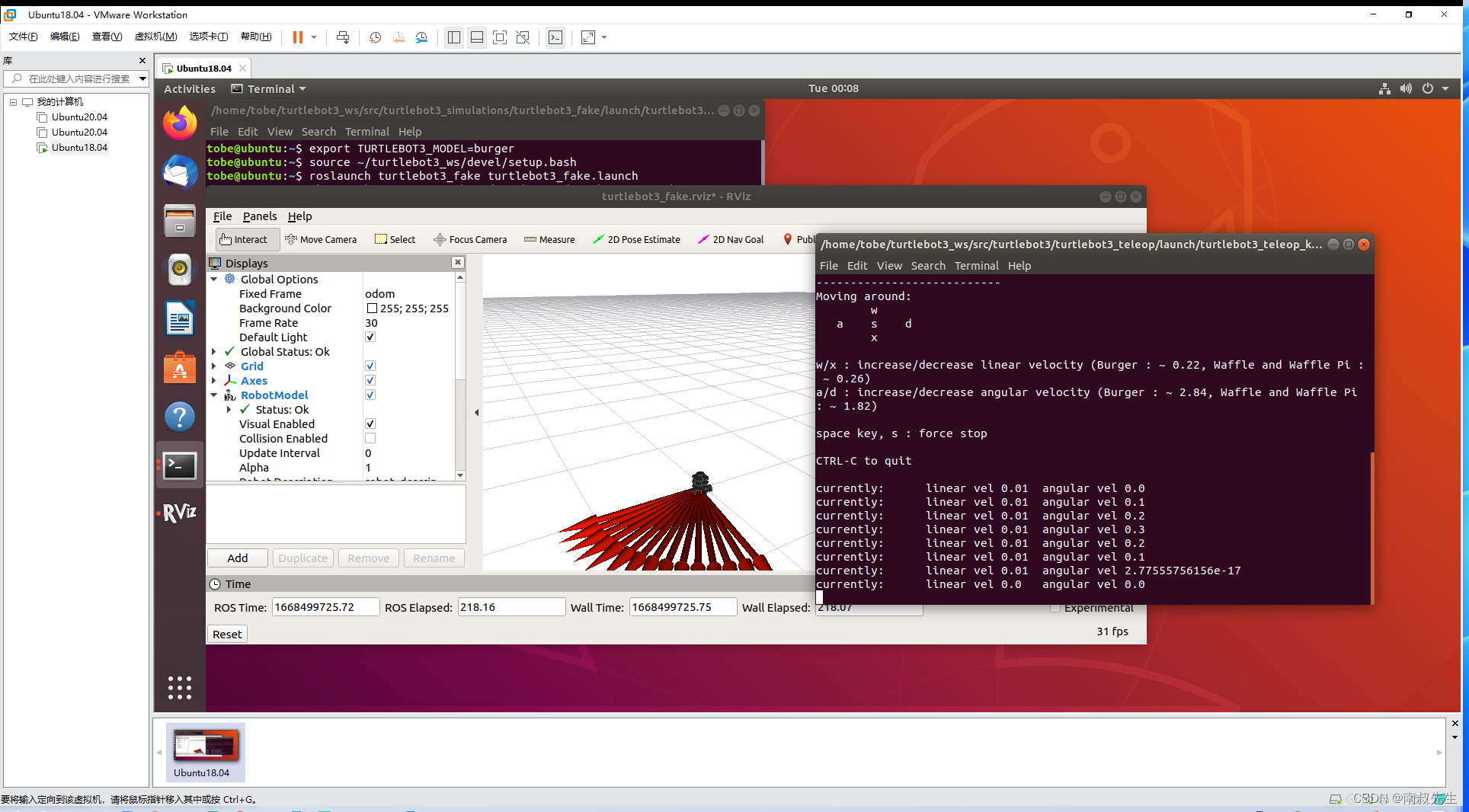
4、新建Terminal(Ctrl+Shft+T),打开键盘控制
export TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch可以通过键盘控制小车运动了
5、打开Gazebo
先把模型移动到一个文件夹
mkdir -p ~/.gazebo/models/
cp -r ~/turtlebot3_ws/scr/turtlebot3_simulations/turtlebot3_gazebo/worlds ~/.gazebo/models/然后打开模型
export TURTLEBOT3_MODEL=burger
source ~/turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_gazebo turtlebot3_empty_world.launch
如果打开自动关闭,那么关机,然后修改虚拟机设置。
处理器多加几个核,显示器那个√去掉


二、建图
1、启动地图,选择自己想测试的地图即可
source ~/turtlebot3_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_world.launchexport TURTLEBOT3_MODEL=burger
source turtlebot3_ws/devel/setup.bash
roslaunch turtlebot3_gazebo turtlebot3_house.launch2、打开键盘控制
source ~/turtlebot3_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch3、创建栅格地图
source ~/turtlebot3_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_slam turtlebot3_slam.launch
此时就可以通过控制键盘移动来完成建图了
4、保存地图
source /opt/ros/melodic/setup.bash
mkdir -p ~/worldmap
rosrun map_server map_saver -f ~/worldmap/worldmap如果没安装则需要安装
sudo apt-get update
sudo rosdep init
rosdep update
sudo apt-get install ros-melodic-map-server5、导航
加载地图
source /opt/ros/melodic/setup.bash
rosrun map_server map_server worldmap/worldmap.yaml打开rviz
rviz添加map

启动Gazebo
source ~/turtlebot3_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_world.launch打开导航文件
source ~/turtlebot3_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=/home/worldmap/worldmap.yaml使用2D Pose Estimate设定好小车起始地点,再使用2D Nav Goal设定小车目标地点,小车会规划好路径,自动运行到目标位置,实现自主导航功能