为何数字摄影测量中需要提取点/线
“ 点和线是做图像分析时两个最重要的特征,而 线条往往反映了物体的轮廓,对图像中边缘线的检测是图像分割与特征提取的基础。常用的边缘检测算法:Sobel边缘检测和Canny边缘检测。。”
 感谢原作者
感谢原作者

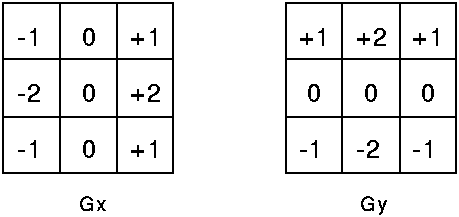
Sobel卷积因子为:【理解卷积 https://www.zhihu.com/question/22298352】
【灰度值:指黑白图像中点的颜色深度,范围一般从0到255,白色为255,黑色为0,故黑白图片也称灰度图像】
该算子包含两组3x3的矩阵,分别为横向及纵向,将之与图像作平面卷积,即可分别得出横向和纵向的亮度差分近似值。如果以A代表原始图像,Gx及Gy分别代表经横向及纵向边缘检测的图像灰度值,其公式如下:

具体计算如下:
Gx = (-1)*f(x-1, y-1) + 0*f(x,y-1) + 1*f(x+1,y-1)
+(-2)*f(x-1,y) + 0*f(x,y)+2*f(x+1,y)
+(-1)*f(x-1,y+1) + 0*f(x,y+1) + 1*f(x+1,y+1)
= [f(x+1,y-1)+2*f(x+1,y)+f(x+1,y+1)]-[f(x-1,y-1)+2*f(x-1,y)+f(x-1,y+1)]
Gy =1* f(x-1, y-1) + 2*f(x,y-1)+ 1*f(x+1,y-1)
+0*f(x-1,y) 0*f(x,y) + 0*f(x+1,y)
+(-1)*f(x-1,y+1) + (-2)*f(x,y+1) + (-1)*f(x+1, y+1)
= [f(x-1,y-1) + 2f(x,y-1) + f(x+1,y-1)]-[f(x-1, y+1) + 2*f(x,y+1)+f(x+1,y+1)]
其中f(a,b), 表示图像(a,b)点的灰度值;
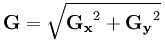
图像的每一个像素的横向及纵向灰度值通过以下公式结合,来计算该点灰度的大小:
通常,为了提高效率 使用不开平方的近似值:
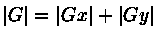
如果梯度G(该点灰度的大小)> 某一阀值 则认为该点(x,y)为边缘点。
然后可用以下公式计算梯度方向(下式求的是角度):
【梯度:是一个矢量,其方向上的方向导数最大,其大小正好是此最大方向导数(方向导数是该点各个方向上的导数)。eg:水滴往下滑,所以要说多说明一下,往下滑是梯度的反方向。因为梯度指的是增长最快的方向,而往下滑是减少最快的方向 https://www.zhihu.com/question/36301367】
Sobel算子根据像素点上下、左右邻点灰度加权差 在边缘处达到极值这一现象检测边缘。对噪声具有平滑作用,提供较为精确的边缘方向信息,边缘定位精度不够高。当对精度要求不是很高时,是一种较为常用的边缘检测方法。