首先放实验效果
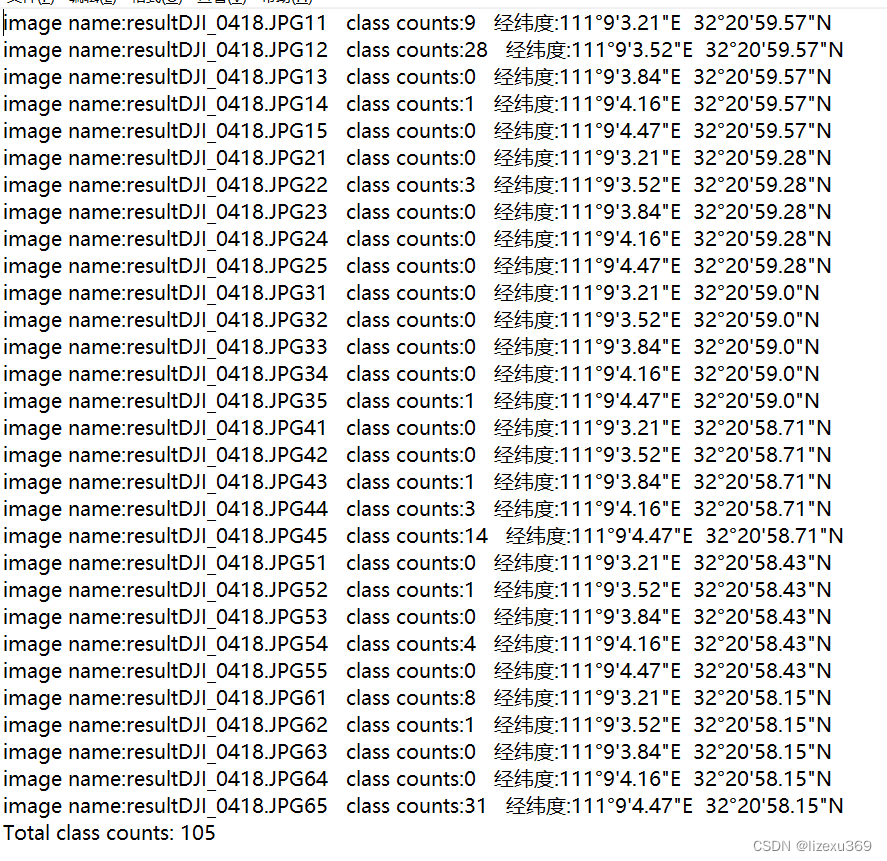
上面的都为DJI_0418.JPG切成的小图片,原始图片分辨率为5280*3956,上文一共切成了30份
import argparse
import time
from pathlib import Path
import numpy as np
import cv2
import torch
import torch.backends.cudnn as cudnn
from numpy import random
import glob
import os
from models.experimental import attempt_load
from utils.datasets import LoadStreams, LoadImages
from utils.general import check_img_size, check_requirements, check_imshow, non_max_suppression, apply_classifier,
scale_coords, xyxy2xywh, strip_optimizer, set_logging, increment_path
from utils.plots import plot_one_box
from utils.torch_utils import select_device, load_classifier, time_synchronized
import math
import re
def get_number(filename):
return int(‘’.join(filter(str.isdigit, filename)))
#将小数形式的经度转为度分秒形式的字符串
def lng_to_dms(lng):
d = int(lng)
m = int((lng - d) * 60)
s = round((lng - d - m / 60) * 3600, 2)
return f"{d}°{m}'{s}“E”
将小数形式的纬度转换为度分秒形式的字符串
def lat_to_dms(lat):
d = int(lat)
m = int((lat - d) * 60)
s = round((lat - d - m / 60) * 3600, 2)
return f"{d}°{m}'{s}“N”
class Image:
def init(self, img, image_name):
self.img = img
self.image_name = image_name
def save_result(self, save_dir, class_count):
save_path = os.path.join(save_dir, self.image_name + ".txt")
with open(save_path, "w") as f:
f.write("Image name: {}\n".format(self.image_name))
f.write("Class counts: {}\n".format(class_count))
f.write("\n")
def detect(opt):
source, weights, view_img, save_txt, imgsz = opt.source, opt.weights, opt.view_img, opt.save_txt, opt.img_size
save_img = not opt.nosave and not source.endswith(‘.txt’) # save inference images
webcam = source.isnumeric() or source.endswith(‘.txt’) or source.lower().startswith(
(‘rtsp://’, ‘rtmp://’, ‘http://’, ‘https://’))
# Directories
save_dir = Path(increment_path(Path(opt.project) / opt.name, exist_ok=opt.exist_ok)) # increment run
(save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir
# Initialize
set_logging()
device = select_device(opt.device)
half = device.type != 'cpu' # half precision only supported on CUDA
# Load model
model = attempt_load(weights, map_location=device) # load FP32 model
stride = int(model.stride.max()) # model stride
imgsz = check_img_size(imgsz, s=stride) # check img_size
if half:
model.half() # to FP16
# Second-stage classifier
classify = False
if classify:
modelc = load_classifier(name='resnet101', n=2) # initialize
modelc.load_state_dict(torch.load('weights/resnet101.pt', map_location=device)['model']).to(device).eval()
# Set Dataloader
vid_path, vid_writer = None, None
if webcam:
view_img = check_imshow()
cudnn.benchmark = True # set True to speed up constant image size inference
dataset = LoadStreams(source, img_size=imgsz, stride=stride)
else:
dataset = LoadImages(source, img_size = (3956,5280), stride=stride)
# Get names and colors
names = model.module.names if hasattr(model, 'module') else model.names
colors = [[random.randint(0, 255) for _ in range(3)] for _ in names]
# Run inference
if device.type != 'cpu':
model(torch.zeros(1, 3, imgsz, imgsz).to(device).type_as(next(model.parameters()))) # run once
t0 = time.time()
#假设大图中心点的经纬度为center_lng,center_lat
center_lng=111.151111 #东经111'9'44'
center_lat=32.349722 #北纬32'20'59'
#假设大图的分辨率为img_width*img_height
img_width=5280
img_height=3956
#假设将大图切割为n_col列,n_row行的小图
n_col=6
n_row=5
#假设每个小图的分辨率为sub_img_width *sub_img_height
sub_img_width=img_width //n_col
sub_img_height=img_height //n_row
#假设拍摄高度为h
h=100
#循环访问包含图像路径、调整大小的图像、原始图像和视频捕获的数据据
for path, img, im0s, vid_cap in dataset:
# Cut images (1920*1439 -> [640*480 + 640*480 + 640*479]*3)
#创建临时变量来存储原始图像和调整大小的图像
tmp_img = img
tmp_im0s = im0s
#创建嵌套循环以裁剪图像。有6行和5列的小块,切成
for m in range(6):
for n in range(5):
#根据循环的当前迭代计算垂直和水平裁剪坐标的最小值和最大值。
ycrop_min = imgsz*n
ycrop_max = imgsz*(n+1)
xcrop_min = imgsz*m
xcrop_max = imgsz*(m+1)
sub_img_center_x=(n+0.5) *sub_img_width
sub_img_center_y=(m+0.5) *sub_img_height
#计算每个小图的中心点的经纬度
dx=(sub_img_center_x-img_width/2) *0.00001/h
dy=(img_height /2 -sub_img_center_y)*0.00001/h
sub_img_center_lng=center_lng+dx
sub_img_center_lat=center_lat+dy
#将小数形式的经纬度转换为度分秒形式的字符串
sub_img_center_lng_str=lng_to_dms(sub_img_center_lng)
sub_img_center_lat_str=lat_to_dms(sub_img_center_lat)
# 输出每个小图的中心点经纬度
print(f"第{m+1}行第{n+1}列小图中心点经纬度为: ({sub_img_center_lng_str}, {sub_img_center_lat_str})")
#如果循环的当前迭代位于最后一列或最后一行,请相应地调整裁剪坐标以避免超出范围。
if(m==5):
xcrop_min = 5280-1-imgsz
xcrop_max = 5280-1
if(n==4):
ycrop_min = 3956-1-imgsz
ycrop_max = 3956-1
#根据计算的裁剪坐标裁剪原始图像和调整大小的图像
#将原始图像裁剪存储在im0s中
#记录裁剪图像所需的时间
tic = time_synchronized()
im0s = tmp_im0s[ycrop_min:ycrop_max, xcrop_min:xcrop_max, :]
img = tmp_img[:, ycrop_min:ycrop_max, xcrop_min:xcrop_max]
tok = time_synchronized()
# Print time (Crop)
print(f'Crop time: ({tok - tic:.5f})')
img = torch.from_numpy(img).to(device)
img = img.half() if half else img.float() # uint8 to fp16/32
img /= 255.0 # 0 - 255 to 0.0 - 1.0
if img.ndimension() == 3:
img = img.unsqueeze(0)
# Inference
t1 = time_synchronized()
pred = model(img, augment=opt.augment)[0]
# Apply NMS
pred = non_max_suppression(pred, opt.conf_thres, opt.iou_thres, classes=opt.classes, agnostic=opt.agnostic_nms)
t2 = time_synchronized()
# Apply Classifier
if classify:
pred = apply_classifier(pred, modelc, img, im0s)
class_ids=[]
# Process detections
for i, det in enumerate(pred): # detections per image
if det is not None and len(det):
#获取检测到的类别的id
det_class_ids = det[:, -1].detach().cpu().numpy()
class_ids.extend(list(det_class_ids))
if webcam: # batch_size >= 1
p, s, im0, frame = path[i], '%g: ' % i, im0s[i].copy(), dataset.count
else:
p, s, im0, frame = path, '', im0s, getattr(dataset, 'frame', 0)
class_count={}
class_count = {class_id: 0 for class_id in range(1)}
for class_id in class_ids:
if class_id in class_count:
class_count[class_id] += 1
else:
class_count[class_id] = 1
print(class_count)
print("Class counts:", class_count[class_id])
p = Path(p) # to Path
# save_path = str(save_dir / 'result')+str(m)+str(n)+'.jpg' # img.jpg p.name
save_path = str(save_dir / ('result'+str(m)+str(n)+'_'+p.stem+'.jpg'))
print('save_path',save_path)
# print('save_path',save_path)
txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # img.txt
# txt_path=Path(save_dir)/'result'/(p.stem+'.txt')
# print('txt_path',txt_path)
# print('p.stem',p.stem)
# print(f"第{m+1}行第{n+1}列小图中心点经纬度为: ({sub_img_center_lng}, {sub_img_center_lat})")
#将检测到的类别数量写入txt文件
filename=os.path.basename(path)
# with open(str(save_dir / 'result') +filename + str(m+1) + str(n+1) + '.txt', 'w',encoding='utf-8') as f:
# f.write('Image name: '+filename + '\n' + 'class counts: '+str(class_count[class_id]) + '\n'
# +"第{}行第{}列小图中心点经纬度为{}{}:".format(m,n,sub_img_center_lng,sub_img_center_lat))
with open(str(save_dir / 'result') + filename + str(m+1) + str(n+1) + '.txt', 'w', encoding='utf-8') as f:
f.write('Image name: ' + filename + '\n' + 'class counts: ' + str(class_count[class_id]) + '\n'
+ "经纬度:{} {}".format(sub_img_center_lng_str, sub_img_center_lat_str))
# with open(txt_path,'w') as f:
# f.write('\n'.join([f'{k}: {v}' for k, v in class_count.items()]))
s += '%gx%g ' % img.shape[2:] # print string
gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh
if len(det):
# Rescale boxes from img_size to im0 size
det[:, :4] = scale_coords(img.shape[2:], det[:, :4], im0.shape).round()
# Print results
for c in det[:, -1].unique():
n = (det[:, -1] == c).sum() # detections per class
s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string
# Write results
for *xyxy, conf, cls in reversed(det):
label=f'{names[int(cls)]}{conf:.2f}'
im0s=np.ascontiguousarray(im0s)
plot_one_box(xyxy, im0s, label=label, color=colors[int(cls)], line_thickness=3)
# img = Image(im0s, os.path.basename(path))
# img.save_result(save_dir,class_count[class_id])
if save_txt: # Write to file
xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh
line = (cls, *xywh, conf) if opt.save_conf else (cls, *xywh) # label format
# with open(txt_path + '.txt', 'a') as f:
# f.write(('%g ' * len(line)).rstrip() % line + '\n')
if save_img or view_img: # Add bbox to image
label = f'{names[int(cls)]} {conf:.2f}'
im0=np.ascontiguousarray(im0s)
plot_one_box(xyxy, im0, label=label, color=colors[int(cls)], line_thickness=3)
# Print time (inference + NMS)
print(f'{s}Done. ({t2 - t1:.3f}s)')
# Stream results
if view_img:
cv2.imshow(str(p), im0)
cv2.waitKey(1) # 1 millisecond
# Save results (image with detections)
if save_img:
if dataset.mode == 'image':
cv2.imwrite(save_path, im0)
else: # 'video' or 'stream'
if vid_path != save_path: # new video
vid_path = save_path
if isinstance(vid_writer, cv2.VideoWriter):
vid_writer.release() # release previous video writer
if vid_cap: # video
fps = vid_cap.get(cv2.CAP_PROP_FPS)
w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
else: # stream
fps, w, h = 30, im0.shape[1], im0.shape[0]
save_path += '.mp4'
vid_writer = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h))
vid_writer.write(im0)
if save_txt or save_img:
s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else ''
print(f"Results saved to {save_dir}{s}")
print(f'Done. ({time.time() - t0:.3f}s)')
# 指定要遍历的目录路径和合并后的txt文件路径
txt_dir = '/home/xcn/new-data/z/YOLOv5_with_BiFPN-main/runs/detect/exp133'
merged_txt_path = '/home/xcn/new-data/z/YOLOv5_with_BiFPN-main/runs/detect/2.txt'
# 遍历目录中的所有txt文件
txt_files = sorted(glob.glob(os.path.join(txt_dir, '*.txt')), key=lambda x: int(os.path.basename(x).split('.')[1].split('JPG')[1]))
# print('txt_files',txt_files)
# 存储每个图像的class counts的字典
total_counts = {}
# 合并所有的txt文件到一个大的txt文件中
with open(merged_txt_path, 'w') as f:
for txt_file in txt_files:
# 从文件名中获取图像名称
img_name = os.path.splitext(os.path.basename(txt_file))[0]
# print('经度',sub_img_center_lng_str)
# 读取txt文件内容并获取class counts
with open(txt_file, 'r') as f_txt:
lines = f_txt.readlines()
jingwei=lines[2]
# print('lines',lines)
# print('jingwei',jingwei)
counts = lines[-2].split(':')[1].strip()
# print('counts',counts)
# 将class counts添加到total_counts字典中
total_counts[img_name] = counts
# 将图像名称和class counts写入到大的txt文件中
f.write('image name:{} class counts:{} {}\n'.format(img_name,counts,jingwei))
# f.write('class counts:{}\n'.format(counts))
# f.write('经纬度:{}\n'.format(jingwei))
# f.write(f' {img_name}: {counts} {jingwei}\n')
# f.write("第{}行第{}列小图中心点经纬度为{}{}".format(m, n, sub_img_center_lng_str, sub_img_center_lat_str))
# 计算总的class counts并写入到大的txt文件中
total_class_count = sum(map(int, total_counts.values()))
with open(merged_txt_path, 'a') as f:
f.write(f'Total class counts: {total_class_count}\n')
if name == ‘main’:
parser = argparse.ArgumentParser()
parser.add_argument(‘–weights’, nargs=‘+’, type=str, default=‘runs/train/exp3/weights/best.pt’, help=‘model.pt path(s)’)
# parser.add_argument(‘–weights’, nargs=‘+’, type=str, default=‘weights/v5lite-s.onnx’, help=‘model.pt path(s)’)
parser.add_argument(‘–source’, type=str, default=‘data/wubeizi/test’, help=‘source’) # file/folder, 0 for webcam
parser.add_argument(‘–img-size’, type=int, default=640, help=‘inference size (pixels)’)
parser.add_argument(‘–conf-thres’, type=float, default=0.3, help=‘object confidence threshold’)
parser.add_argument(‘–iou-thres’, type=float, default=0.45, help=‘IOU threshold for NMS’)
parser.add_argument(‘–device’, default=‘0’, help=‘cuda device, i.e. 0 or 0,1,2,3 or cpu’)
parser.add_argument(‘–view-img’, action=‘store_true’, help=‘display results’)
parser.add_argument(‘–save-txt’, action=‘store_true’, help=‘save results to *.txt’)
parser.add_argument(‘–save-conf’, action=‘store_true’, help=‘save confidences in --save-txt labels’)
parser.add_argument(‘–nosave’, action=‘store_true’, help=‘do not save images/videos’)
parser.add_argument(‘–classes’, nargs=‘+’, type=int, help=‘filter by class: --class 0, or --class 0 2 3’)
parser.add_argument(‘–agnostic-nms’, action=‘store_true’, help=‘class-agnostic NMS’)
parser.add_argument(‘–augment’, action=‘store_true’, help=‘augmented inference’)
parser.add_argument(‘–update’, action=‘store_true’, help=‘update all models’)
parser.add_argument(‘–project’, default=‘runs/detect’, help=‘save results to project/name’)
parser.add_argument(‘–name’, default=‘exp’, help=‘save results to project/name’)
parser.add_argument(‘–exist-ok’, action=‘store_true’, help=‘existing project/name ok, do not increment’)
opt = parser.parse_args()
print(opt)
check_requirements(exclude=(‘pycocotools’, ‘thop’))
with torch.no_grad():
if opt.update: # update all models (to fix SourceChangeWarning)
for opt.weights in ['yolov5s.pt', 'yolov5m.pt', 'yolov5l.pt', 'yolov5x.pt']:
detect(opt=opt)
strip_optimizer(opt.weights)
else:
detect(opt=opt)
以上是全部的detect.py的代码,将Yolov5的detect.py进行了修改