车辆的诊断需要有Tester端和ECU端,Tester端和ECU端通过一问一答的形式进行通信,因而Tester端和ECU端都需要遵循同样的诊断通信协议。
常用的诊断协议有ISO 14230,ISO 15031,ISO 15765,还有我们熟悉的ISO 14229就是UDS协议,在协议里面定义了诊断的请求,诊断响应的报文格式,以及ECU怎样处理诊断请求报文,以及诊断服务的应用。
UDS全称Unified diagnostic services,即统一诊断服务。
UDS主要对车载电子控制单元提供统一的诊断功能,如:自动变速箱、防抱死制动系统等。
UDS包含了对传输、数据处理、以及具体的诊断应用服务等各方面的要求,不单指某一方面的诊断服务而是包含了对传输方式、数据格式要求、具体诊断服务等一系列的标准和交互架构。
在国际标准ISO 14229-1中定义,UDS标准中除了定义服务的用法,以及服务的格式以外,还定义了一些标准化的数据,而到OEM要使用UDS协议时,除了要使用标准定义的服务以及标准数据以外,还要依据自身的情况,定义属于OEM的特定数据,比如说,定义所要遵循的服务,需要支持的DID,需要支持的DTC等这些内容,这样形成的符合某OEM的诊断规范才能用于ECU诊断功能的开发以及验证。
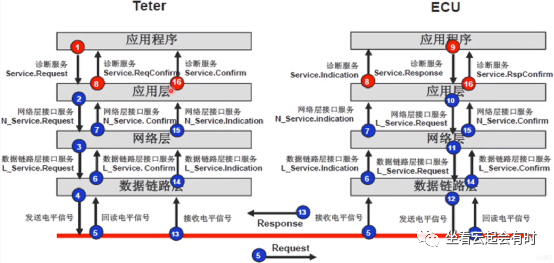
下图就描述了UDS在OSI七层模型中的应用,OSI七层模型,第一层第二层分别定义了物理层和数据链路层,第三层第四层定义了网络层和传输层,第七层是应用层。
应用层:诊断服务的具体实现,用于tester/client发出诊断请求,server(MCU)根据请求做出不同响应
网络层:中间层,是数据转换的桥梁,包括多帧数据传输,进行数据的打包、拆包,协调上下层工作;还包括对等实体间的通信,数据同步,时间管理,错误管理。
数据链路层:CAN 总线(ISO 11898-1)最初指定的链路层协议仅包括对物理层的抽象需求,ISO11898-1-2015指定了经典CAN帧格式和新引入CAN-FD帧格式。 高速物理层关于电气方面的(电压,电流,数量导体)规定来自于 ISO 11898-2,该协议目前被广泛接受;低速则在 ISO 11898-3 中。但是,物理层关于机械方面的(接头种类和数量、颜色、标签、标准输出)并没有标准文档来正式指定。
物理层:传输所需要的硬件条件,包括收发器,终端电阻,双绞线,距离限制,尺寸;哪些传感器的CANH和CANL连接到网络上,不同速率网络通信需要网关等。
比如说我们熟悉CAN总线,物理层和数据链路层遵循的是ISO 11898,而它的传输层遵循的是ISO 15765-2,在ISO 14229-3中定义了UDS基于CAN总线的应用,而现在比较火的以太网,它的物理层和数据链路层遵循的是ISO 13400-3,它的传输层也就是DoIP遵循的是ISO 13400-2, 它的UDS基于以太网的应用是ISO 14229-5

关于诊断流程的描述:
客户端(client)/诊断仪(tester):发送诊断请求者(读写数据,启动例程)
服务器(server/ECU):诊断响应的提供者-ECU发送诊断响应(正响应、负响应)
远程诊断(Remote diagnosis):客户端和服务器不在同一个网段
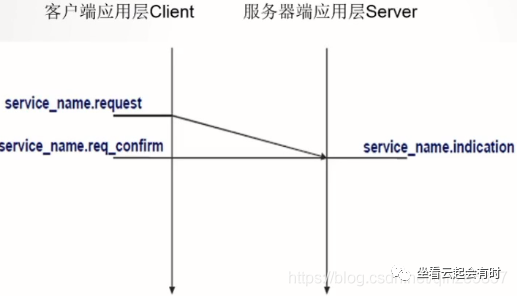
服务函数:
请求 request:诊断仪对ECU发送请求;
请求确认 req_confirm:当请求被成功收到之后,诊断仪会调用req_confirm表示“请求已经正确的发送成功”;
指示 indication:ECU收到请求后会有一个指示(回调)告诉ECU上层“收到一个诊断请求”;
响应 response:ECU对请求处理完之后,会有返回一个响应;
响应确认 rsp_confirm:诊断仪收到响应之后,ECU会触发rsp_confirm,表示响应发送成功;
确认confirm:当响应发到网络被诊断仪接收到之后,诊断仪会有一个确认confirm(回调),表示已经处理完请求;
服务分为两类有确认服务和无确认服务:
- 有确认服务:

- 无确认服务:
诊断的流程:
诊断学习记录 (二) - UDS 服务
UDS 寻址方式有两种:
功能寻址(1:N):
客户端(Tester)与服务器(ECU)之间采用一对多的诊断通信方式,客户端向多个服务器发出同一功能寻址的诊断请求。
物理寻址(1:1):
客户端(Tester)与服务器(ECU)之间采用一对一的诊断通信方式。
UDS应用层服务
服务原语:
服务请求原语:由诊断测试仪诊断应用程序的客户端使用,以启动请求服务并将关于所请求的诊断服务的数据传递给ECU。
服务请求确认原语:用来指示请求服务是否正确传输。
服务指示原语:应用层使用指示原语将关于请求的诊断服务数据传递给ECU的诊断应用程序,并且启动对应的服务功能。
服务响应原语:由ECU诊断应用程序中的服务器使用,以启动响应服务并诊断服务提供的响应数据传递给诊断测试仪。
服务响应确认原语:用来指示响应服务是否正确传输。
服务确认原语:应用层使用确定原语将先前服务请求的结果传递给诊断测试仪。
服务请求原语的消息格式如下:
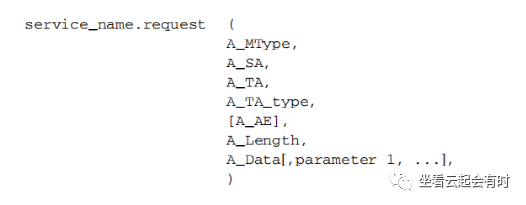
A_MType(应用层消息类型):
类型:枚举
范围:diagnostic,remote diagnostic
说明:
如果为diagnostic,则原语不包含A_AE参数。
如果为remote diagnostic,则原语包含A_AE参数。
A_SA(应用层源地址):
类型:2字节无符号整数
范围:0x0000 ~ 0xFFFF
说明:用于编码客户端与服务器标识符。
A_TA(应用层目标地址):
类型:2字节无符号整数
范围:0x0000 ~ 0xFFFF
说明:用于编码客户端与服务器标识符。
A_TA_type(应用层目标地址类型):
类型:枚举
范围:physical,function
说明:用于描述消息的寻址方式。
A_AE(应用层远程地址):
类型:2字节无符号整数
范围:0x0000 ~ 0xFFFF
说明:用于扩展可用的地址范围以编码(远程)客户端和(远程服务器)标识符。
A_Length:
类型:4字节无符号整数
范围:0 ~ 232-1
说明:需要发送/接收的数据长度。
A_Data:
类型:字符串
范围:0 ~ 232-1
说明:需要发送/接收的数据。
UDS应用层服务的数据格式:
请求服务标识符(SID):
类型:1字节无符号整数
范围:0x00 ~ 0xFF
请求服务的SID:(X0XXXXXX)b SID的第6位为1
肯定响应服务标识符(SID):
类型:1字节无符号整数
范围:0x00 ~ 0xFF
肯定响应服务标识符:(X1XXXXXX)b SID第6位为1
肯定响应服务的SID = 请求服务标识符 + 0x40
否定响应服务标识符(NR_SID):
类型:1字节无符号整数
固定值:0x7F
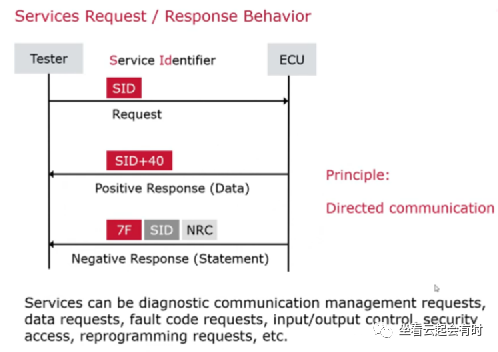
首先来看服务请求和响应格式,“请求”由Tester端发送给ECU,请求报文里带有SID,根据具体的服务内容后面加具体的数据。肯定响应格式由“SID+40+具体的数据”。否定响应格式是一个固定的格式“7F+请求报文里的SID+一个字节的NRC”。
看两个名词,一个叫做Subfunction,一个叫做ID,UDS服务支持Subfunction的请求和响应格式,“请求”为“SID+一个字节Subfunction+具体的数据”,
肯定响应为“SID+40+Subfunction+具体的数据”,而有的UDS服务里面是不支持Subfunction,是支持DID的,DID是“数据ID”的意思,那么它的请求格式为“SID+具体的DID+数据内容”,肯定响应“SID+40+DID+具体的数据”,这里举出两个例子,一个是 “31例程控制服务”,还有一个是“2F IO控制服务”,31就是它的请求报文里面,带一个字节的Subfunction和两个字节的Routine ID,后面的这个数据是跟具体的数据内容,也可以没有具体的数据。2F是它的SID+两个字节的DID+一个字节的输入输出控制参数(这里注意这一个字节的数据类似于Subfunction,但是他不是Subfunction)+后面加具体的数据内容。
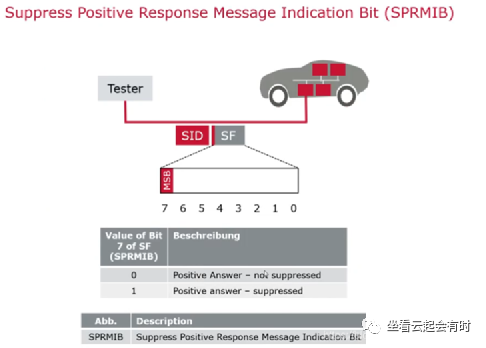
上图有一个概念,为肯定响应抑制位。肯定响应抑制位是在Subfunction里的这个字节的最高位,我们把它叫做肯定响应抑制位。只有这个服务支持Subfunction的时候,才有可能支持肯定响应抑制位,当肯定响应抑制位置1的时候,要求所有的肯定响应的抑制将不再发送。当肯定响应抑制位为0的时候,肯定响应是不被抑制的。这里要注意的是它只是抑制肯定响应,而否定响应是不被抑制的。
Tester发送的请求报文格式错误,或者请求发送的条件处于错误,ECU将发送否定响应,否定响应的格式是“7F+SID+NRC”,常用到的NRC在这里罗列了。
11 表示服务不支持;
12 subfunction不支持;
13 请求的长度不正确,或者格式不正确
31 是请求超出范围;
7E 是在当前会话下subfunction不支持
7F 是在当前会话下服务不支持
下面是与时间有关的参数:
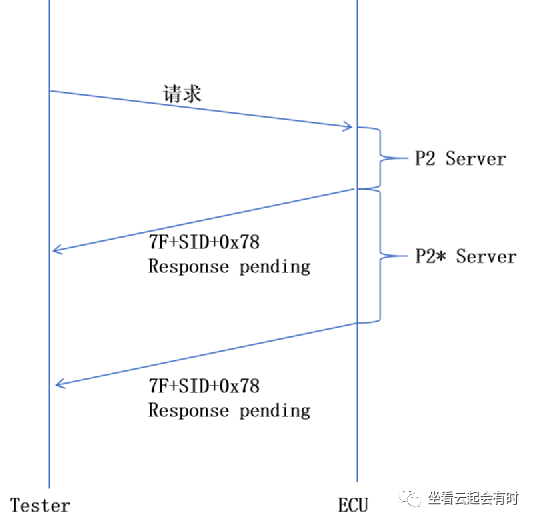
当Tester给ECU发送请求过后,ECU需要在P2Sever时间内给出相应的响应,如果ECU当前正在处理别的任务,处理别的事情,而不能在P2Sever的时间内给出相应的响应,那么它先在P2Sever时间内给出一个NRC为78的Pending报文,告诉Tester“ECU正在忙”,之后会在P2Sever*的时间内给出其它的响应报文,如果P2Sever*的时间内还是不能给出相应的肯定响应和否定响应,将继续给出Pending报文,直到能够正确处理请求报文之后,会给出正确的响应报文。
P2 Server:
当ECU(Server端)接收到请求后需要在P2时间内给出响应,如果超时,则会报Timeout,返回否定响应(0x7F+SID+0x78),说明响应超时。
在实际项目中会区分P2 Server与P2 Client,其中Server对应ECU,Client端对应Tester
P2* Server:
当ECU收到请求后,在P2时间内没有给出响应,这时候ECU会发送否定响应(0x7F+SID+0x78),并且开启P2*计时器。在P2*计时器到达时,若还未发送响应,则再次发送否定响应(0x7F+SID+0x78),重新启动P2*计时器。
在实际项目中,不会一直发送NRC 0x78,启动P2*计时器的次数由OEM定义。
ISO-14229-2内P2 Server的推荐值为50ms,P2* Server的推荐值为5000ms。
另外,还有一个跟UDS会话模式相关的时间参数S3 Server。
UDS会话模式:
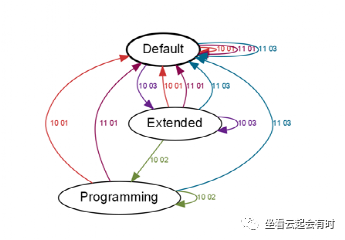
UDS有三种会话模式:默认会话、扩展会话、编程会话
0x10(Session Control)与0x11(ECU reset)服务能够改变ECU的会话模式
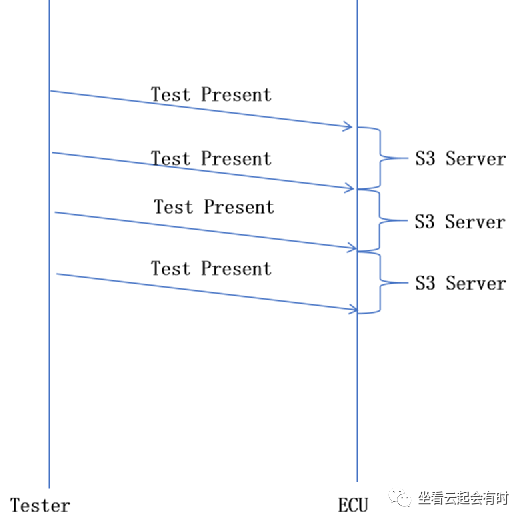
S3 Server:
S3 Server保持在非默认会话的最长时间,即在ECU处于非默认会话模式时,如果在S3时间内没有收到诊断请求,则会自动退回到默认会话模式。
周期性发送0x3E(Test Present)服务来使得ECU维持在非默认会话模式。
如下是UDS会话模式的转换图:
S3 Server 时间的示意图如下: