参考:
视频:
https://www.bilibili.com/video/BV187411T7Ye/?spm_id_from=333.999.0.0&vd_source=b425cf6a88c74ab02b3939ca66be1c0d
博客:https://blog.csdn.net/STATEABC/article/details/123661612?utm_medium=distribute.pc_feed_404.none-task-blog-2defaultBlogCommendFromBaiduRate-8-123661612-blog-null.pc_404_mixedpudn&depth_1-utm_source=distribute.pc_feed_404.none-task-blog-2defaultBlogCommendFromBaiduRate-8-123661612-blog-null.pc_404_mixedpud
搭建网络
- 在pytorch中搭建模型:
1、先写一个类,继承nn.Module
2、在类中实现两个方法:
①__init__(self) 初始化函数:
实现在搭建网络过程中需要使用到的一些网络层结构
②forward(self,x):
定义正向传播的过程
实例化这个类之后,将参数传递到实例中,进行正向传播。按照forward里面的这个顺序来运行。
import torch.nn as nn
import torch.nn.functional as F
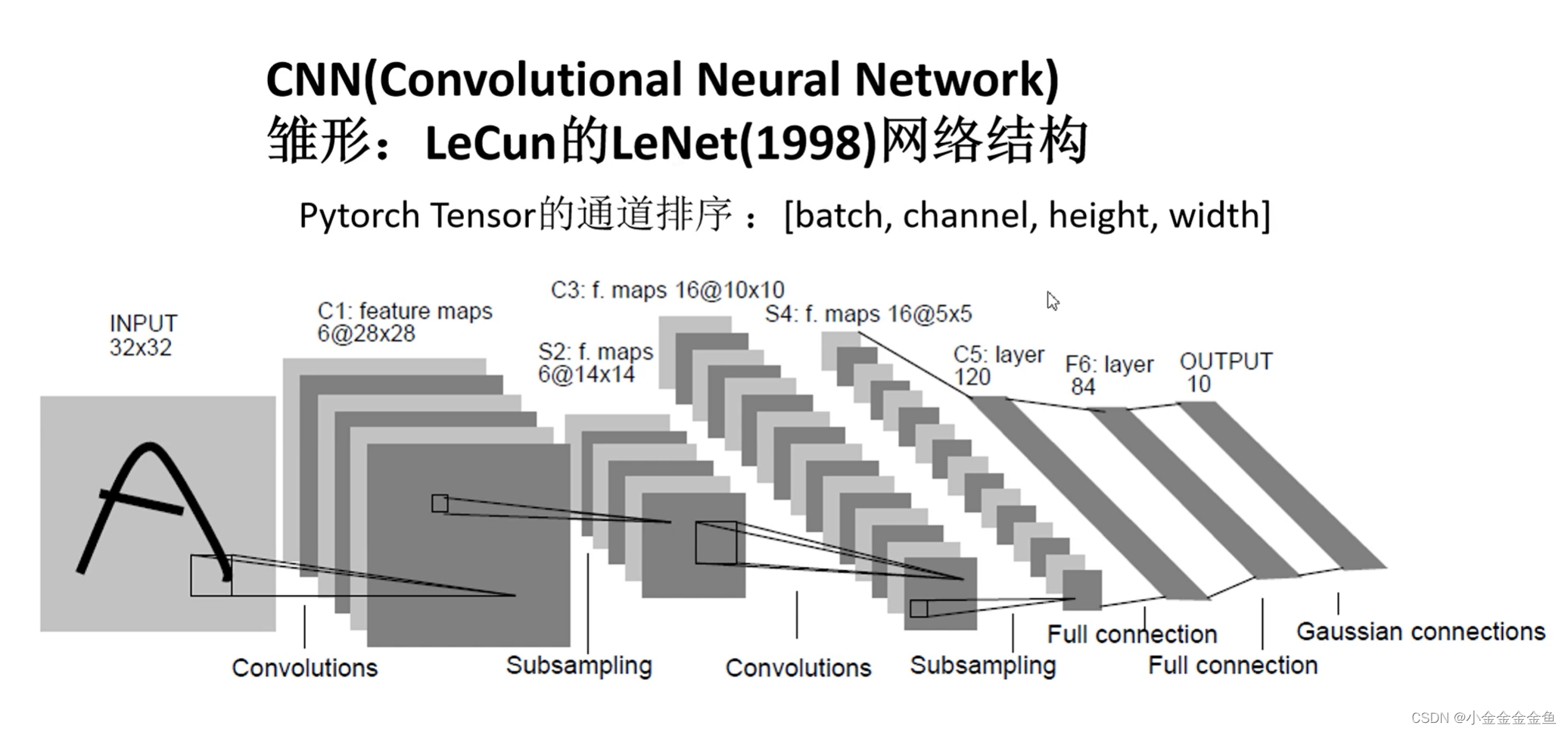
class LeNet(nn.Module): #在Pytorch中搭建模型首先要定义一个类,这个类要继承于nn.Module这个父类
def __init__(self): #在该类中首先要初始化函数,实现在搭建网络过程中需要使用到的网络层结构,#然后在forward中定义正向传播的过程
super(LeNet, self).__init__() #super能够解决在多重继承中调用副类可能出现的问题
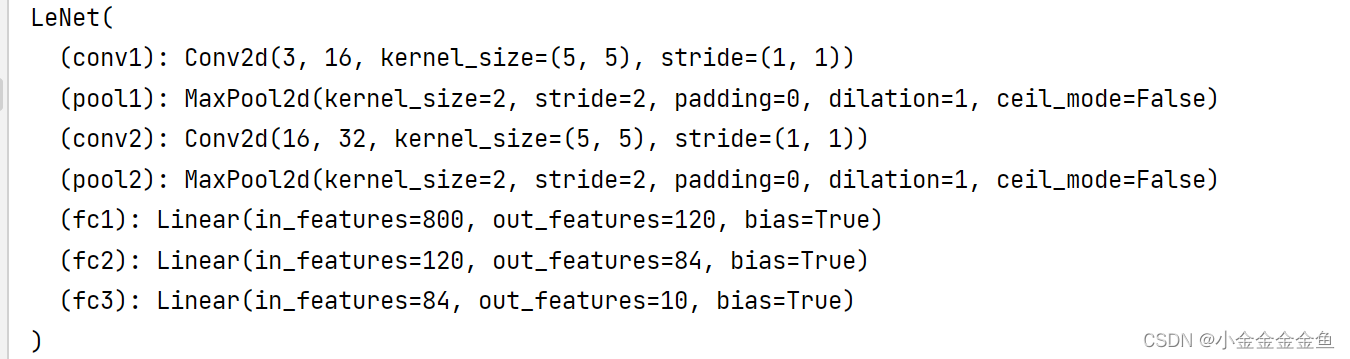
self.conv1 = nn.Conv2d(3, 16, 5) #这里输入深度为3,卷积核个数为16,大小为5x5
self.pool1 = nn.MaxPool2d(2, 2) #最大池化核大小为2x2,步长为2
self.conv2 = nn.Conv2d(16, 32, 5) #经过Conv2d的16个卷积核处理后,输入深度变为16
self.pool2 = nn.MaxPool2d(2, 2)
self.fc1 = nn.Linear(32*5*5, 120) #全连接层的输入是一维的向量,因此将输入的特征矩阵进行展平处理(32x5x5),然后根据网络设置输出
self.fc2 = nn.Linear(120, 84)
self.fc3 = nn.Linear(84, 10) #输出有几个类别就设置几
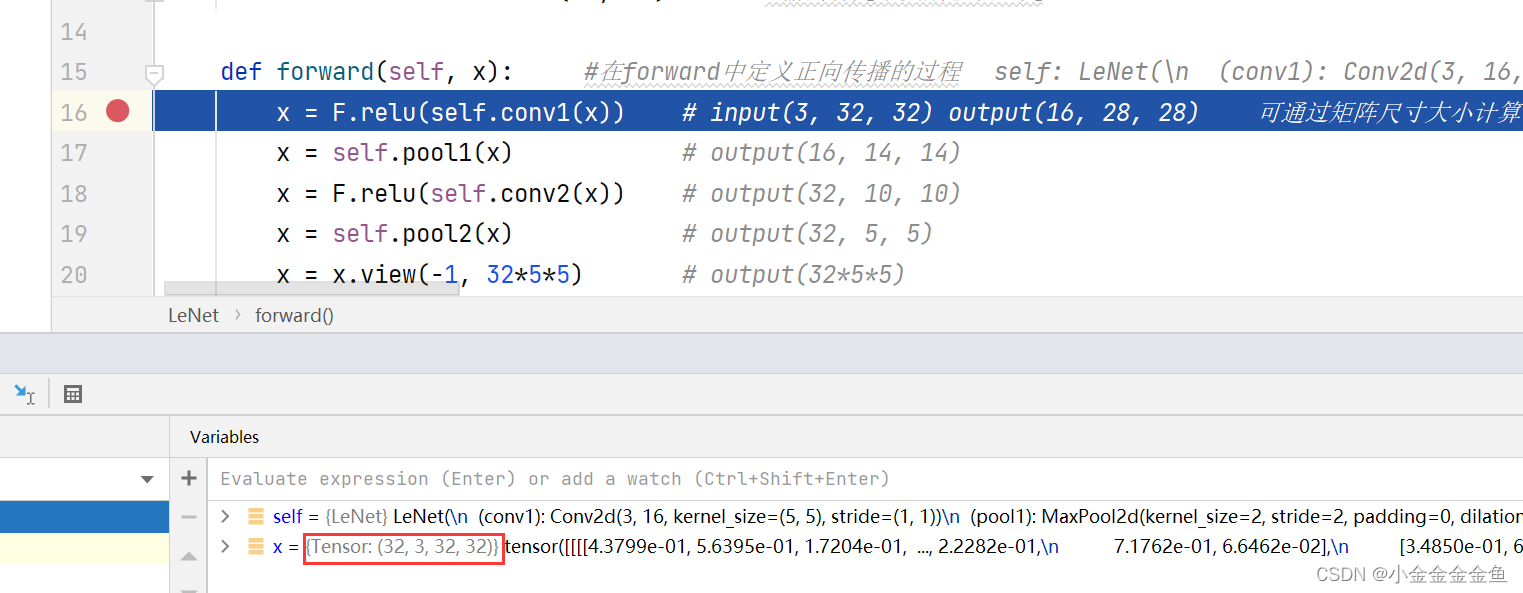
def forward(self, x): #在forward中定义正向传播的过程
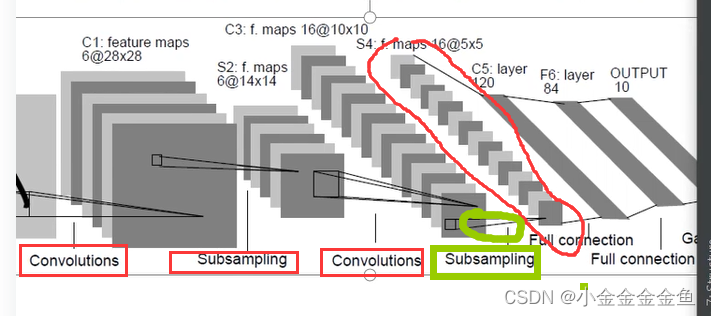
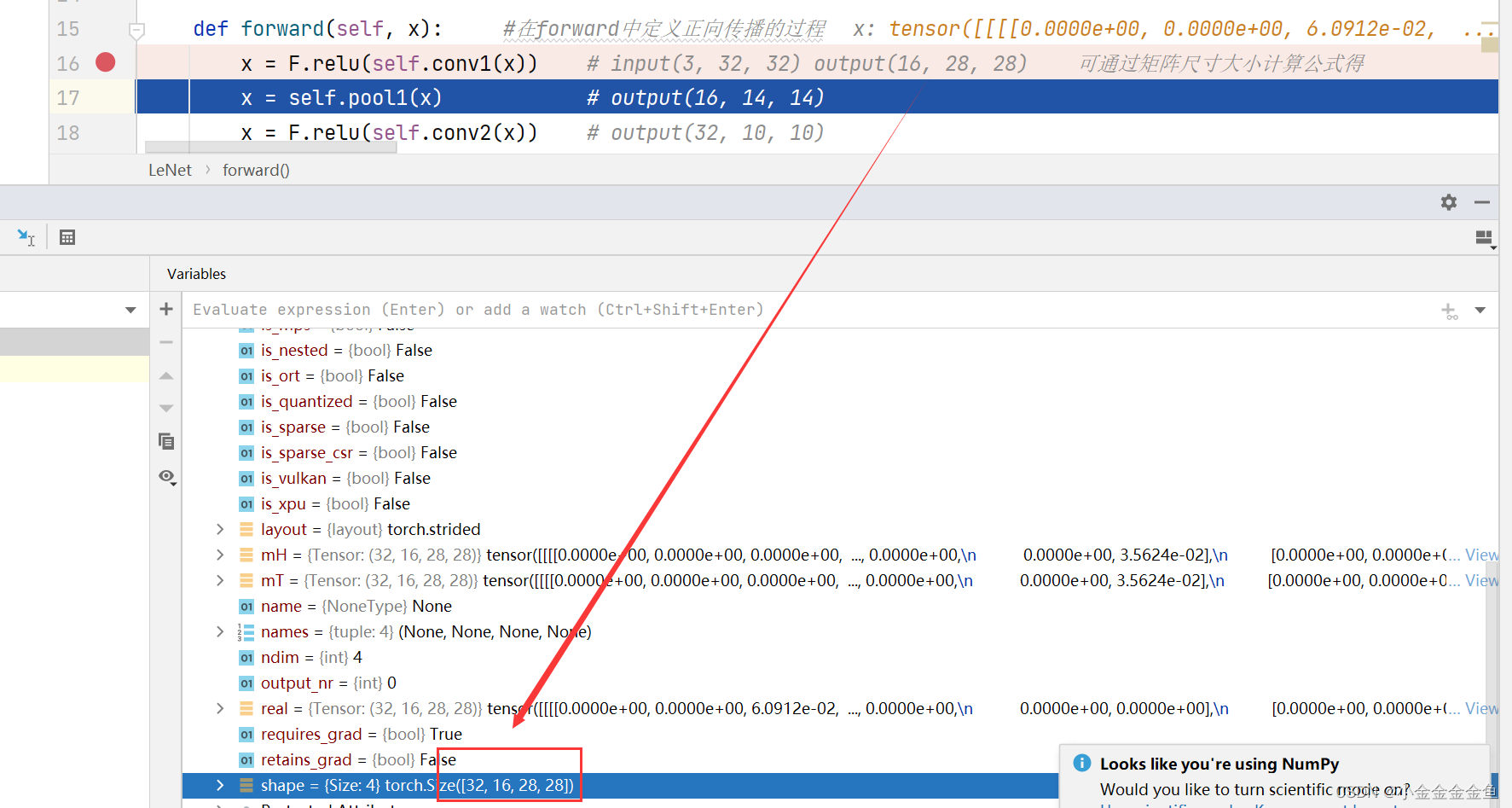
x = F.relu(self.conv1(x)) # input(3, 32, 32) output(16, 28, 28) 可通过矩阵尺寸大小计算公式得
x = self.pool1(x) # output(16, 14, 14)
x = F.relu(self.conv2(x)) # output(32, 10, 10)
x = self.pool2(x) # output(32, 5, 5)
x = x.view(-1, 32*5*5) # output(32*5*5)
x = F.relu(self.fc1(x)) # output(120)
x = F.relu(self.fc2(x)) # output(84)
x = self.fc3(x) # output(10)
return x
-
init(self)
①super:在定义类的过程中继承了nn.Module类。super:在多层继承中调用父类可能出现的问题。
②第一个卷积层: self.conv1 = nn.Conv2d(3, 16, 5):
通过nn.Conv2d函数(使用2d卷积,对输入的数据进行处理)来构建卷积层。参数:
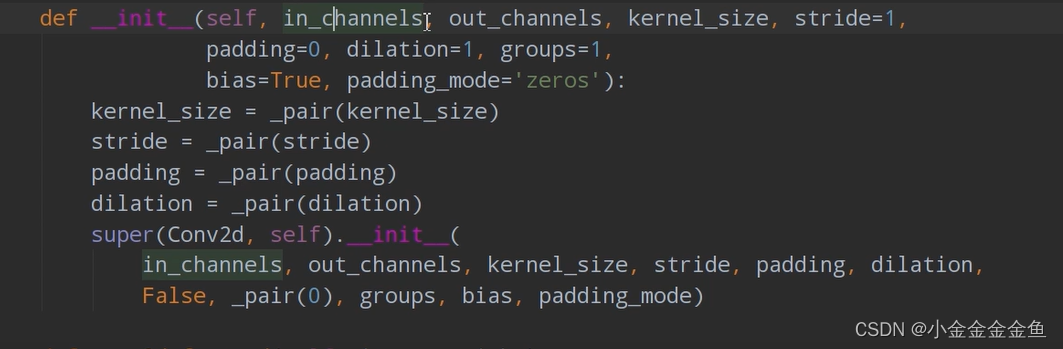
1 in_channels 输入特征矩阵的深度(如:3:R,G,B)
2 out_channels 使用卷积核的个数(使用几个卷积核,就会生成一个深度为多少维的特征矩阵)
3 kernel_size 卷积核大小
4 stride 步长,默认等于1
5 padding 在四周补数时默认等于0
6 dilation groups 比较高阶,暂时用不到
7 bias 偏置,True默认使用
self.conv1 = nn.Conv2d(3, 16, 5)
↓
输入深度为3,卷积核个数为16,大小为5x5
③计算输出图片的大小:
( padding=0 )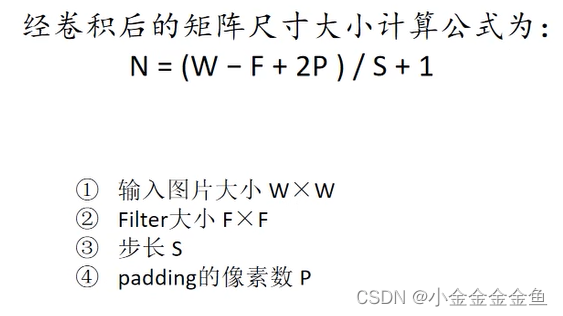
(32-5)/1+1 = 28
所以输出的是16x28x28(16个卷积核,所以channel变成16了)
如果写了batch,那就是输出(banchx16x28x28)
④定义下采样层:self.pool1 = nn.MaxPool2d(2, 2) :
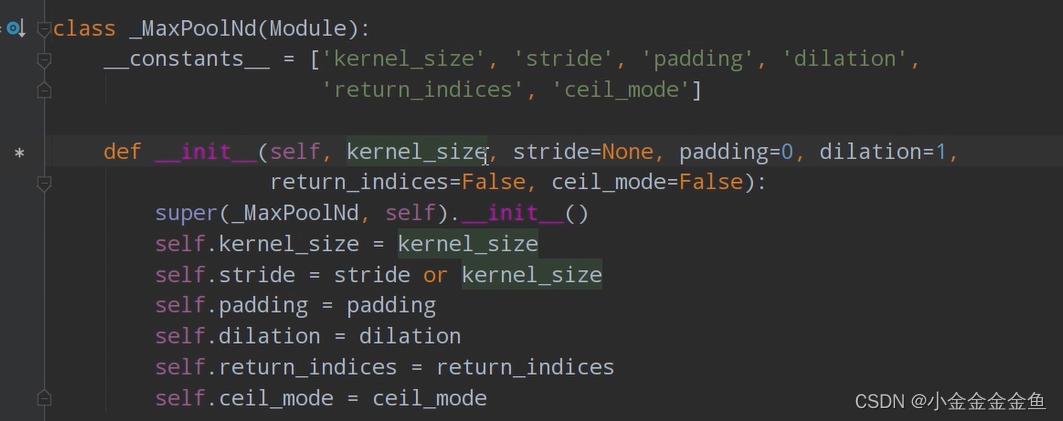
1 kernel_size 池化核大小
2 stride 如果不去指定步长,则采用与池化核大小一样的步距
self.pool1 = nn.MaxPool2d(2, 2)
↓
采用池化核大小2x2,步长为2的最大池化操作
⑤计算池化层输出:(28-2)/2+1=14,即宽度高度缩减为输入的一半
池化层,只改变特征矩阵的高和宽,不影响深度(16)
⑥第二个卷积层:self.conv2 = nn.Conv2d(16, 32, 5)
输入深度16,采用32个卷积核,尺寸5x5
(14-5+0)/1+1 = 10
所以输出为32x10x10
⑦第二个下采样层:nn.MaxPool2d(2, 2)
(10-2)/2+1 = 5
所以输出为(32x5x5)的尺寸
⑧第一个全连接层:self.fc1 = nn.Linear(32x5x5, 120)
全连接层的输入为一维向量,所以要把特征矩阵展平变成一维向量。
↓所以第一个全连接层的输入为32x5x5,有120个参数
⑨第二个全连接层:self.fc2 = nn.Linear(120, 84)
输入为上个全连接层的输出(120个节点)
第二层这里设置84个节点(看顶上的网络结构图,按照这个神经网络的定义来构建这个网络)
⑩self.fc3 = nn.Linear(84, 10)
84就是上一层定义的84个节点。
输出需要根据训练集来弄。这里是10(使用cifar10训练–>具有10个类别的分类任务)。 -
forward(self,x) 定义前向传播
x:输入的数据:按照以下排列顺序的数据↓

①x = F.relu(self.conv1(x))
数据x经过定义的卷积层1
将得到的输出通过relu激活函数
②x = self.pool1(x)
将输出通过下采样1层
③x = F.relu(self.conv2(x))
……
④x = self.pool2(x)
……
到了这里
要和全连接层进行拼接,将特征矩阵展平变成一维向量↓
⑤x = x.view(-1, 32x5x5)
将特征矩阵展平变成一维向量
-1 第一个维度,自动推理,为batch
3255展平后节点个数
-1是xpython里view(x,y)函数的一个可选取值,x这一项置为-1,就会自动根据整个向量的维度和后面的y计算x这项
-1表示不确定展开成几行,但是知道要展开成32x5x5列,因为一共就是32x5x5,所以是一行,即一维向量
-1是代表自动推理,函数自己计算那个维度的大小
⑥x = F.relu(self.fc1(x))
将数据通过全连接层1+它的激活函数
⑦x = F.relu(self.fc2(x))
……
⑧x = self.fc3(x)
通过全连接层3得到最终的输出
为什么这里没有用Softmax这个函数?
对于分类问题,一般会在最后接上一个softmax层,让输出转化成为一个概率分布。
但是在训练网络过程中,计算卷积交叉熵的过程中,已经在它的内部(优化器SGD中)实现了softmax方法,所以这里不用再添加了。
测试
# 实例化 ↑ 后进行测试 ↓
import torch
input1 =torch.rand([32,3,32,32]) #定义随机生成数据的shape batch,深度,高度,宽度
model = LeNet() #实例化模型
print(model)
output = model(input1) #将数据输入到网络中进行正向传播
将input变量传输类的实例model,为什么会自动调用forward() ?
在nn.mldule类中,有一个call方法调用了forward函数,所以所有的nn.module子类中默认调用forward函数
【
实例后得到的实例当成一个函数调用的时候(例如:model(),此处model是实例)会调用实例所属类的__call__方法,而_call__方法中调用了forward方法
】
训练:
cifar10数据集
提前下载复制到当前目录的data文件夹里面
transform = transforms.Compose( # 通过transforms.Compose函数将使用的预处理方法打包成一个整体
[transforms.ToTensor(),
# 将PIL图像或numpy数据转化成tensor,即将shape (H x W x C) in the range [0, 255]转换成shape (C x H x W) in the range [0.0, 1.0]
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) # 标准化的过程
transform,对图像进行预处理
Compose函数把用到的一些预处理方法打包成一个整体
- ToTensor
 - Normalize
- Normalize
标准化,使用均值或者标准差来标准化tensor

# 导入50000张训练图片
train_set = torchvision.datasets.CIFAR10(root='./data', # 数据集存放目录,这里是当前目录的data文件夹下
train=True, # 如果是True,就会导入cifar10训练集的样本
download=True, # 第一次运行时为True,下载数据集,下载完成后改为False
transform=transform) # 预处理过程
# 加载训练集,实际过程需要分批次(batch)训练
train_loader = torch.utils.data.DataLoader(train_set, # 导入的训练集
batch_size=50, # 每批训练的样本数
shuffle=False, # 是否打乱训练集
num_workers=0) # 使用线程数,在windows下设置为0
通过CIFAR10函数导入训练集,将训练集的每一个图像通过transform预处理函数进行预处理
# 10000张测试图片
# 第一次使用时要将download设置为True才会自动去下载数据集
test_set = torchvision.datasets.CIFAR10(root='./data', train=False,
download=False, transform=transform)
test_loader = torch.utils.data.DataLoader(test_set, batch_size=4,
shuffle=False, num_workers=0)
# 获取测试集中的图像和标签,用于accuracy计算
test_data_iter = iter(test_loader)
test_image, val_label = test_data_iter.next()
将test_loader转化为可迭代的迭代器
通过next方法可获取到一批数据,其中包含图像、图像对应的标签值
发现.next()这里报错,改为了:
# 导入标签
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
iindex[0]对应plane
模型
net = LeNet() #实例化模型
loss_function = nn.CrossEntropyLoss()
#定义损失函数,在nn.CrossEntropyLoss中已经包含了Softmax函数
optimizer = optim.Adam(net.parameters(), lr=0.001)
#定义优化器,这里使用Adam优化器,net是定义的LeNet,parameters将LeNet所有可训练的参数都进行训练,lr=learning rate
- nn.CrossEntropyLoss() 损失函数

可以看出已经内置了softmax函数 - optim.Adam(net.parameters(), lr=0.001) 优化器
使用Adam优化器
net.parameters():把net(LeNet)中可训练的参数都进行训练
lr学习率
有GPU时使用GPU,无GPU时使用CPU训练
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(device)
net = LeNet() #实例化模型
# net.to(device) #将网络分配到指定的device中
loss_function = nn.CrossEntropyLoss() #定义损失函数,在nn.CrossEntropyLoss中已经包含了Softmax函数
optimizer = optim.Adam(net.parameters(), lr=0.001) #定义优化器,这里使用Adam优化器,net是定义的LeNet,parameters将LeNet所有可训练的参数都进行训练,lr=learning rate
# 对应的,需要用to()函数来将Tensor在CPU和GPU之间相互移动,分配到指定的device中计算
for epoch in range(5): # loop over the dataset multiple times #将训练集迭代的次数(5轮)
running_loss = 0.0 #累加训练过程的损失
# time_start = time.perf_counter()
for step, data in enumerate(train_loader, start=0): #遍历训练集样本
# get the inputs; data is a list of [inputs, labels]
inputs, labels = data #将得到的数据分离成输入(图片)和标签
# zero the parameter gradients
optimizer.zero_grad() #将历史损失梯度清零,如果不清除历史梯度,就会对计算的历史梯度进行累加(通过这个特性能够变相实现一个很大的batch)
# forward + backward + optimize
outputs = net(inputs) # 将图片放入网络正向传播,得到输出
# outputs = net(inputs.to(device)) # 将inputs分配到指定的device中
# loss = loss_function(outputs, labels.to(device)) # 将labels分配到指定的device中
loss = loss_function(outputs, labels) #计算损失,outputs为网络预测值,labels为输入图片对应的真实标签
loss.backward() #将loss进行反向传播
optimizer.step() #进行参数更新
# print statistics
running_loss += loss.item() #计算完loss完之后将其累加到running_loss
# 累加损失,因为希望每500次迭代计算一个损失:
if step % 500 == 499: # print every 500 mini-batches #每隔500次打印一次训练的信息
with torch.no_grad():
# with是一个上下文管理器:在接下来的计算中,不要计算每个节点中误差的损失梯度。否则即使在测试阶段中也会计算
# 会自动生成前向的传播图,这会占用大量内存,测试时应该禁用
# outputs = net(val_image.to(device)) # 将test_image分配到指定的device中
outputs = net(test_image) # [batch, 10] [0]为batch
predict_y = torch.max(outputs, dim=1)[1] #寻找输出的最大的index。在维度1上进行最大值的预测,[1]为index索引,[0]为batch
# accuracy = (predict_y == test_label.to(device)).sum().item() / test_label.size(0) # 将test_label分配到指定的device中
accuracy = torch.eq(predict_y, test_label).sum().item() / test_label.size(0) #将预测的标签类别与真实的标签类别进行比较,在相同的地方返回值为1,否则为0,用此计算预测对了多少样本
print('[%d, %5d] train_loss: %.3f test_accuracy: %.3f' %
(epoch + 1, step + 1, running_loss / 500, accuracy))
# print('%f s' % (time.perf_counter() - time_start))
running_loss = 0.0
print('Finished Training')
- enumerate就是c++里面的枚举,返回每一批数据的data和这一批data对应的步数index。
start=0说明从0开始
得到数据后,将数据分离成图像和标签:inputs, labels = data - optimizer.zero_grad()
将历史损失梯度清零

如果不清除历史梯度,就会对计算的历史梯度进行累加(通过这个特性能够变相实现一个很大的batch)
一般情况下,batch_size是根据硬件设备来设置的。数值设置的越大,训练效果就越好。但一般由于硬件设备受限,内存不足,所以不可能用很大的batch训练。所以用这种梯度清零的方法来实现很大batch的训练:
一次性计算多个小的batch的损失梯度,变相得到一个很大的batch的图片的损失梯度。再对这个大batch的梯度进行反向传播。 - accuracy = torch.eq(predict_y, test_label).sum().item() / test_label.size(0)
torch.eq(predict_y, test_label) 相同的地方返回True(1),否则返回False(0)。
sum:求和,计算本次测试中预测对了多少个样本 - running_loss = 0.0
清零,进行下一轮
save_path = './Lenet.pth' #保存权重
torch.save(net.state_dict(), save_path) #将网络的所有参数及逆行保存
保存网络所有参数
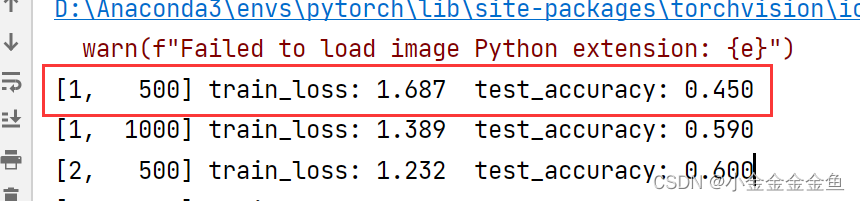
在第一个epoch中的第500步,训练的损失是1.687,测试准确率是0.450
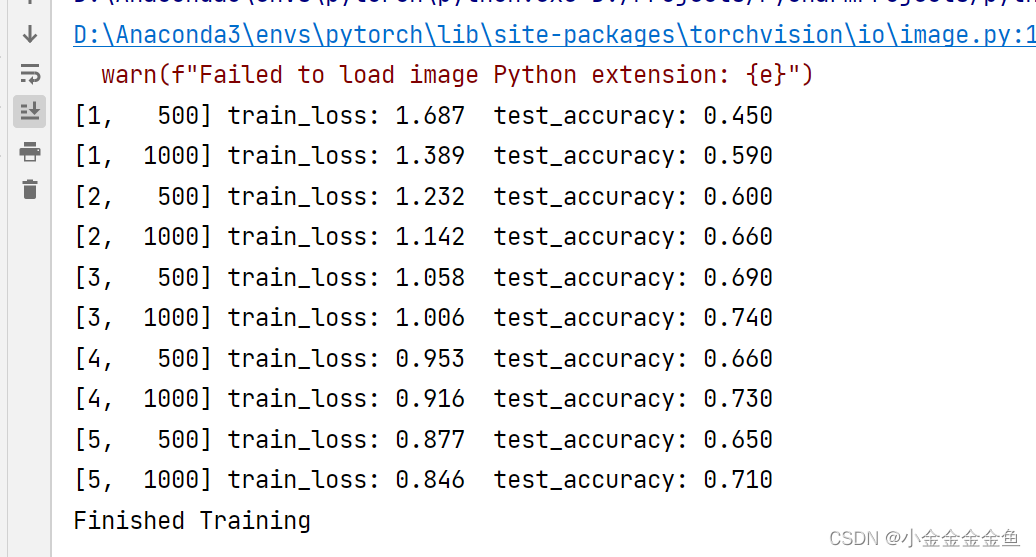
最终准确率0.710
可以看到已经生成了本次训练的模型权重文件
测试:
调用模型权重进行预测
transform = transforms.Compose(
[transforms.Resize((32, 32)), #首先需resize成跟训练集图像一样的大小
transforms.ToTensor(), #转化成tensor
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) #标准化处理
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
net = LeNet() #实例化网络
net.load_state_dict(torch.load('Lenet.pth')) #载入保存的权重文件
im = Image.open('plane.png') #导入要测试的图片
# PIL图像导入的可是一般都是宽度,高度,通道,要正向传播则要转变成pytorch tensor的格式
im = transform(im) # [C, H, W]
im = torch.unsqueeze(im, dim=0) # [N, C, H, W] #对数据增加一个新维度,因为tensor的参数是[batch, channel, height, width]
with torch.no_grad():
outputs = net(im) #把图像传入网络
predict = torch.max(outputs, dim=1)[1].numpy() #寻找输出汇总的最大尺度对应的index(索引),把它传入classes
print(classes[int(predict)])
或者使用softmax得到一个概率分布:
with torch.no_grad():
outputs = net(im) #把图像传入网络
# predict = torch.max(outputs, dim=1)[1].numpy() #寻找输出汇总的最大尺度对应的index(索引),把它传入classes
predict = torch.softmax(outputs, dim=1) #使用softmax函数 因为输出的是[channel,第一个维度],所以dim=1
# print(classes[int(predict)])
print(predict)


tensorboard
先用测试图片试了一下
发现以前用这个就行:
tensorboard --logdir=logs --port=6007
但是这次不灵了,换成这个:
tensorboard --logdir=D:\Projects\PycharmProjects\pythonProject_pilipala\Lesson1_LeNet\logs --port=6007
就是换成了那个logs文件的绝对路径
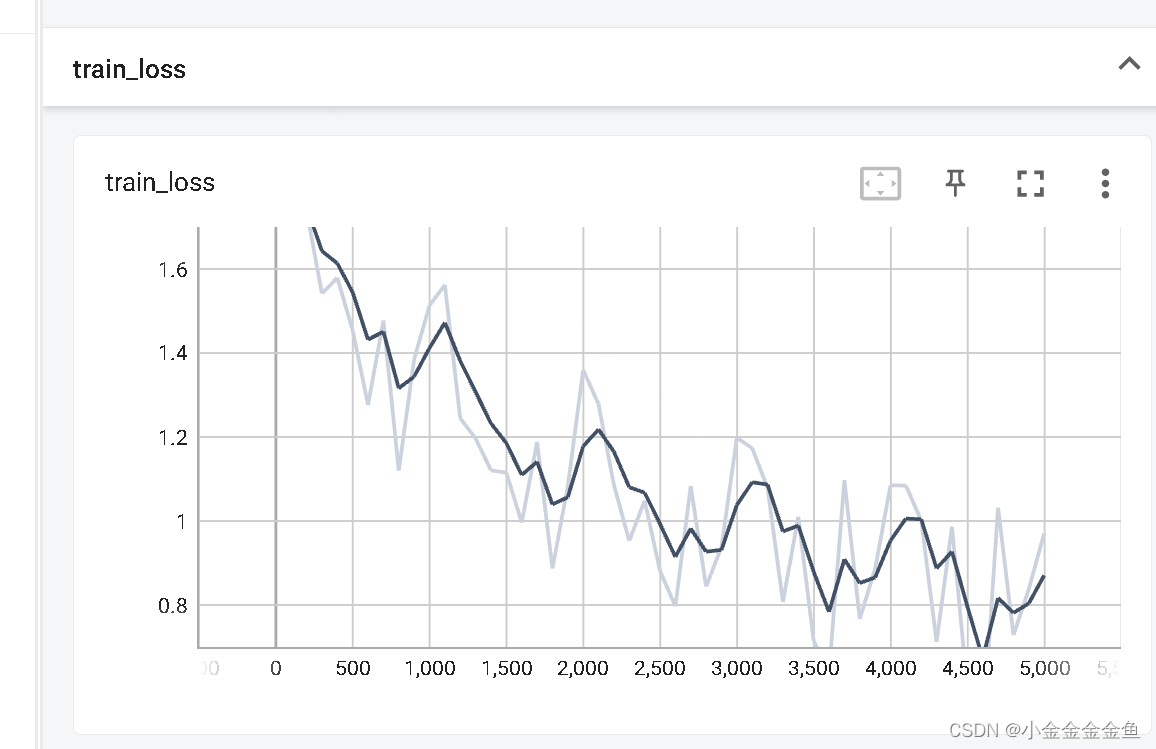
把loss的变化图像做出来了:
import torch
import torchvision
import torch.nn as nn
from lenet import LeNet
import torch.optim as optim
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
import numpy as np
from torch.utils.tensorboard import SummaryWriter
transform = transforms.Compose( # 通过transforms.Compose函数将使用的预处理方法打包成一个整体
[transforms.ToTensor(),
# 将PIL图像或numpy数据转化成tensor,即将shape (H x W x C) in the range [0, 255]转换成shape (C x H x W) in the range [0.0, 1.0]
transforms.Normalize((0.5, 0.5, 0.5), (0.5, 0.5, 0.5))]) # 标准化的过程
# 导入50000张训练图片
train_set = torchvision.datasets.CIFAR10(root='./data', # 数据集存放目录,这里是当前目录的data文件夹下
train=True, # 如果是True,就会导入cifar10训练集的样本
download=False, # 第一次运行时为True,下载数据集,下载完成后改为False
transform=transform) # 预处理过程
# 加载训练集,实际过程需要分批次(batch)训练
train_loader = torch.utils.data.DataLoader(train_set, # 导入的训练集
batch_size=50, # 每批训练的样本数
shuffle=False, # 是否打乱训练集
num_workers=0) # 使用线程数,在windows下只能设置为0
# 10000张测试图片
# 第一次使用时要将download设置为True才会自动去下载数据集
test_set = torchvision.datasets.CIFAR10(root='./data', train=False,
download=False, transform=transform)
test_loader = torch.utils.data.DataLoader(test_set, batch_size=100,
shuffle=False, num_workers=0)
# 添加tensorboard-------------------------------------------------
writer = SummaryWriter("logs_train_cifar10")
# 获取测试集中的图像和标签,用于accuracy计算
test_data_iter = iter(test_loader)
# 将test_loader转化为可迭代的迭代器
test_image, test_label = test_data_iter.__next__()
# 通过next方法可获取到一批数据,其中包含图像、图像对应的标签值
# 导入标签
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
net = LeNet() #实例化模型
loss_function = nn.CrossEntropyLoss() #定义损失函数,在nn.CrossEntropyLoss中已经包含了Softmax函数
optimizer = optim.Adam(net.parameters(), lr=0.001) #定义优化器,这里使用Adam优化器,net是定义的LeNet,parameters将LeNet所有可训练的参数都进行训练,lr=learning rate
# 使用下面语句可以在有GPU时使用GPU,无GPU时使用CPU进行训练
# device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# print(device)
net = LeNet() #实例化模型
# net.to(device) #将网络分配到指定的device中
loss_function = nn.CrossEntropyLoss() #定义损失函数,在nn.CrossEntropyLoss中已经包含了Softmax函数
optimizer = optim.Adam(net.parameters(), lr=0.001) #定义优化器,这里使用Adam优化器,net是定义的LeNet,parameters将LeNet所有可训练的参数都进行训练,lr=learning rate
# 对应的,需要用to()函数来将Tensor在CPU和GPU之间相互移动,分配到指定的device中计算
# 记录训练的次数
total_train_step = 0
for epoch in range(5): # loop over the dataset multiple times #将训练集迭代的次数(5轮)
running_loss = 0.0 #累加训练过程的损失
# time_start = time.perf_counter()
for step, data in enumerate(train_loader, start=0): #遍历训练集样本
# get the inputs; data is a list of [inputs, labels]
inputs, labels = data #将得到的数据分离成输入(图片)和标签
# zero the parameter gradients
optimizer.zero_grad() #将历史损失梯度清零,如果不清除历史梯度,就会对计算的历史梯度进行累加(通过这个特性能够变相实现一个很大的batch)
# forward + backward + optimize
outputs = net(inputs) # 将图片放入网络正向传播,得到输出
# outputs = net(inputs.to(device)) # 将inputs分配到指定的device中
# loss = loss_function(outputs, labels.to(device)) # 将labels分配到指定的device中
loss = loss_function(outputs, labels) #计算损失,outputs为网络预测值,labels为输入图片对应的真实标签
loss.backward() #将loss进行反向传播
optimizer.step() #进行参数更新
# ------------------tensorboard--------------------------
total_train_step = total_train_step + 1
if total_train_step % 100 == 0:
print("训练次数:{},loss:{}".format(total_train_step,loss.item())) # 或者loss.item() .item():把tensor数据类型转化为真实数字
# 逢百记录
writer.add_scalar("train_loss",loss.item(),total_train_step)
# --------------------------------------------
# print statistics
running_loss += loss.item() #计算完loss完之后将其累加到running_loss
# 累加损失,因为希望每500次迭代计算一个损失:
if step % 500 == 499: # print every 500 mini-batches #每隔500次打印一次训练的信息
with torch.no_grad():
# with是一个上下文管理器:在接下来的计算中,不要计算每个节点中误差的损失梯度。否则即使在测试阶段中也会计算
# 会自动生成前向的传播图,这会占用大量内存,测试时应该禁用
# outputs = net(val_image.to(device)) # 将test_image分配到指定的device中
outputs = net(test_image) # [batch, 10] [0]为batch
predict_y = torch.max(outputs, dim=1)[1] #寻找输出的最大的index。在维度1上进行最大值的预测,[1]为index索引,[0]为batch
# accuracy = (predict_y == test_label.to(device)).sum().item() / test_label.size(0) # 将test_label分配到指定的device中
accuracy = torch.eq(predict_y, test_label).sum().item() / test_label.size(0) #将预测的标签类别与真实的标签类别进行比较,在相同的地方返回值为1,否则为0,用此计算预测对了多少样本
print('[%d, %5d] train_loss: %.3f test_accuracy: %.3f' %
(epoch + 1, step + 1, running_loss / 500, accuracy))
# print('%f s' % (time.perf_counter() - time_start))
running_loss = 0.0
print('Finished Training')
# --------------------------------------------
writer.close()
# tensorboard --logdir=logs_train_cifar10 --port=6007
# tensorboard --logdir=D:\Projects\PycharmProjects\pythonProject_pilipala\Lesson1_LeNet\logs_train_cifar10 --port=6007
# --------------------------------------------
save_path = './Lenet.pth' #保存权重
torch.save(net.state_dict(), save_path) #将网络的所有参数及逆行保存