下面主要参考双愚的代码
1. 点云数据文件的创建
随机创建名为test.pcd的点云数据,如下
- test_pcd.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
int main(int argc, char** argv)
{
//步骤一:创建点云对象
pcl::PointCloud<pcl::PointXYZ> cloud;
//步骤二:输入点云参数
cloud.width = 5;
cloud.height = 1;
cloud.is_dense = false;
cloud.points.resize(cloud.width * cloud.height);
//步骤三:用随机数填充点云
for (size_t i=0; i<cloud.points.size(); ++i)
{
cloud.points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
cloud.points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
cloud.points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
//步骤四:保存点云数据为.pcd文件
pcl::io::savePCDFileASCII("../test.pcd", cloud);
//步骤五:打印
std::cerr << "saved " << cloud.points.size() << " data points to test.pcd" << std::endl;
for (size_t i=0; i<cloud.points.size(); ++i)
{
std::cerr << " " << cloud.points[i].x << " " << cloud.points[i].y << " " << cloud.points[i].z << std::endl;
}
return 0;
}
- CMakeLists.txt
cmake_minimum_required (VERSION 2.6 FATAL_ERROR)
project(write_pcd)
find_package(PCL 1.3 REQUIRED)
add_executable(write_pcd write_pcd.cpp)
target_link_libraries(write_pcd ${PCL_LIBRARIES})
- 结果
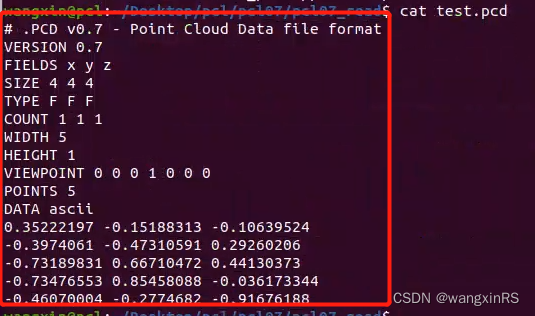
生成的test.pcd文件内容如下
2. 点云数据文件的读取
读取前面创建的test.pcd文件,如下
- read_pcd.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
int main(int argc, char** argv)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("../test.pcd", *cloud) == -1)
{
PCL_ERROR("could not read file test.pcd\n");
}
std::cout << "Loaded "
<< cloud->width * cloud->height // 宽*高
<< " data points from test_pcd.pcd with the following fields: "
<< std::endl;
for (size_t i=0; i < cloud->points.size(); ++i)
{
std::cout << " " << cloud->points[i].x
<< " " << cloud->points[i].y
<< " " << cloud->points[i].z << std::endl;
}
return 0;
}
- CMakeLists.txt
cmake_minimum_required (VERSION 2.6 FATAL_ERROR)
project(read_pcd)
find_package(PCL 1.3 REQUIRED)
add_executable(read_pcd read_pcd.cpp)
target_link_libraries(read_pcd ${PCL_LIBRARIES})
3. 两个点云的拼接
参考博客《【pcl入门教程系列】之点云Concatenate》,点云的拼接存在两种操作,一种是增加点的数量,一种是增加点的维度。
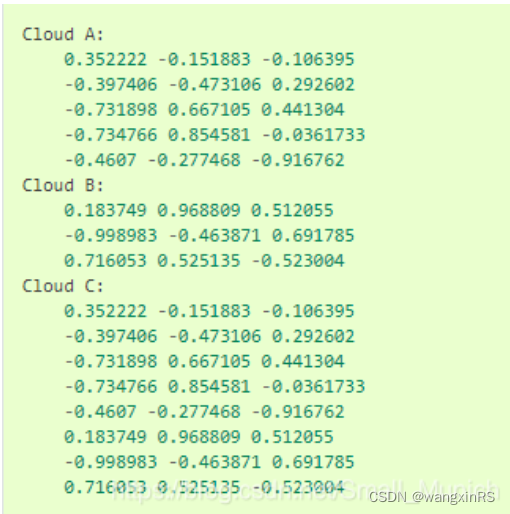
- 操作1:增加点的数量。此时要求两个点云字段和维度完全相同,数量可以不同,将两个点云的相加意味着新点云数量的增加,类似于两个集合的并集,如下图所示
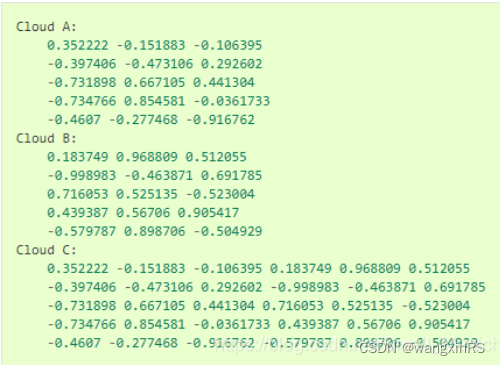
- 操作2:增加点的维度。此时要求两个点云的数量相同,字段和维度可以不同,将两个点云拼接意味着每个店的维度增加,比如点云A用来表示某个物体的形状,每个点用三维向量表示 ( x , y , z ) (x, y, z) (x,y,z),点云B用来表示物体表面的法向量,对应点用三维向量表示 ( x n , y n , z n ) (x_{n}, y_{n}, z_{n}) (xn,yn,zn),这样,点云A和B拼接,则表示对应点维度增加,从单纯表示坐标的三维,变成表示坐标和法向量的6维 ( x , y , z , x n , y n , z n ) (x, y, z, x_n, y_n, z_n) (x,y,z,xn,yn,zn),如下图
例子:创建一个包含5个点的点云cloud_a,同时创建点云cloud_b,他们之间做拼接形成的新点云cloud_c。
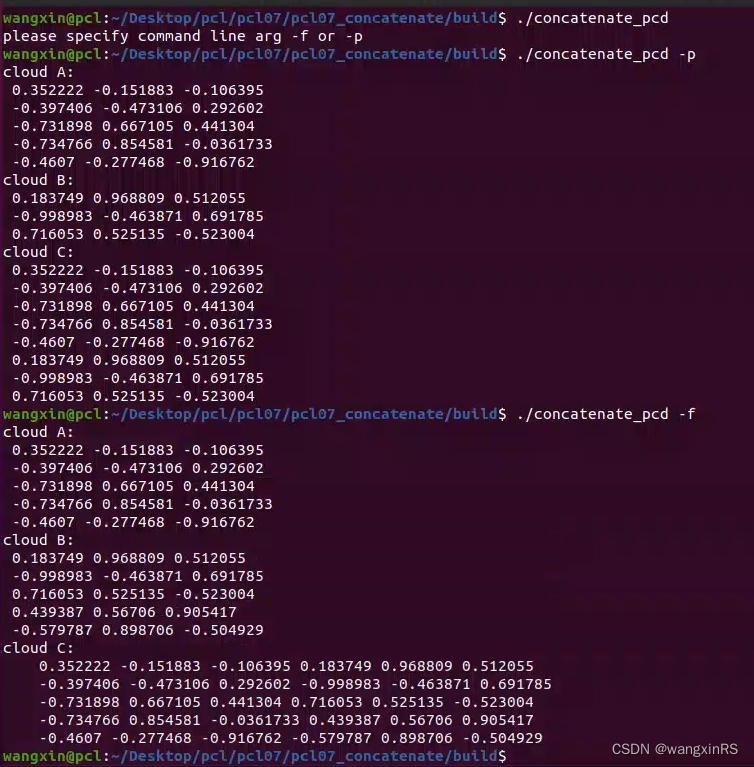
下面的代码生成二进制文件concatenate_pcd,当执行concatenate_pcd -p时,执行操作1,即增加点的数量,此时cloud_b为3个点的点云,新点云cloud_c为包含8个点的点云;当执行concatenate_pcd -f时,执行操作2,即增加点的维度,此时cloud_b为n_cloud_b,包含5个点,新点云cloud_c为包含5个点的点云,每个点的维度增加。
- concatenate_pcd.cpp
#include <iostream>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
int main(int argc, char** argv)
{
if (argc != 2)
{
std::cerr << "please specify command line arg -f or -p" << std::endl;
exit(0);
}
// 步骤1:定义所需要的点云对象
pcl::PointCloud<pcl::PointXYZ> cloud_a, cloud_b, cloud_c;
pcl::PointCloud<pcl::Normal> n_cloud_b;
pcl::PointCloud<pcl::PointNormal> p_n_cloud_c;
// 步骤2:对点云cloud_a赋参数
cloud_a.width = 5;
cloud_a.height = cloud_b.height = n_cloud_b.height = 1;
cloud_a.points.resize(cloud_a.width * cloud_a.height);
// 步骤3:对点云cloud_b赋参数(这里cloud_b可能为cloud_b,也可能为法向量点云n_cloud_b)
if (strcmp(argv[1], "-p") == 0)
{
cloud_b.width = 3;
cloud_b.points.resize(cloud_b.width * cloud_b.height);
}
else
{
n_cloud_b.width = 5;
n_cloud_b.points.resize(n_cloud_b.width * n_cloud_b.height);
}
// 步骤4:填充点云cloud_a
for (size_t i=0; i < cloud_a.points.size(); ++i)
{
cloud_a.points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
cloud_a.points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
cloud_a.points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
// 步骤5:填充点云cloud_b(这里cloud_b可能为cloud_b,也可能为法向量点云n_cloud_b)
if (strcmp(argv[1], "-p") == 0)
{
for (size_t i=0; i < cloud_b.points.size(); ++i)
{
cloud_b.points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
cloud_b.points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);
cloud_b.points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
}
else
{
for (size_t i=0; i < n_cloud_b.points.size(); ++i)
{
n_cloud_b.points[i].normal[0] = 1024 * rand() / (RAND_MAX + 1.0f);
n_cloud_b.points[i].normal[1] = 1024 * rand() / (RAND_MAX + 1.0f);
n_cloud_b.points[i].normal[2] = 1024 * rand() / (RAND_MAX + 1.0f);
}
}
// 步骤6:输出点云cloud_a
std::cerr << "cloud A: " << std::endl;
for (size_t i=0; i<cloud_a.points.size(); ++i)
{
std::cerr << " " << cloud_a.points[i].x << " " << cloud_a.points[i].y << " " << cloud_a.points[i].z << std::endl;
}
// 步骤7:输出点云cloud_b
std::cerr << "cloud B: " << std::endl;
if (strcmp(argv[1], "-p") == 0)
{
for (size_t i=0; i<cloud_b.points.size(); ++i)
{
std::cerr << " " << cloud_b.points[i].x << " " << cloud_b.points[i].y << " " << cloud_b.points[i].z << std::endl;
}
}
else
{
for (size_t i=0; i<n_cloud_b.points.size(); ++i)
{
std::cerr << " " << n_cloud_b.points[i].normal[0] << " " << n_cloud_b.points[i].normal[1] << " " << n_cloud_b.points[i].normal[2] << std::endl;
}
}
// 步骤8:点云cloud_a和点云cloud_b进行拼接,生成cloud_c(拼接操作根据超参数,可能执行操作1,也可能执行操作2)
if (strcmp(argv[1], "-p") == 0)
{
cloud_c = cloud_a;
cloud_c += cloud_b;
std::cerr << "cloud C: " << std::endl;
for (size_t i=0; i<cloud_c.points.size(); ++i)
{
std::cerr << " " << cloud_c.points[i].x << " " << cloud_c.points[i].y << " " << cloud_c.points[i].z << std::endl;
}
}
else
{
pcl::concatenateFields(cloud_a, n_cloud_b, p_n_cloud_c);
std::cerr << "cloud C: " << std::endl;
for (size_t i = 0; i < p_n_cloud_c.points.size(); ++i)
{
std::cerr << " " << p_n_cloud_c.points[i].x << " " << p_n_cloud_c.points[i].y << " " << p_n_cloud_c.points[i].z << " " << p_n_cloud_c.points[i].normal[0] << " " << p_n_cloud_c.points[i].normal[1] << " " << p_n_cloud_c.points[i].normal[2] << std::endl;
}
}
return 0;
}
- CMakeLists.txt
cmake_minimum_required (VERSION 2.6 FATAL_ERROR)
project(concatenate_pcd)
find_package(PCL 1.3 REQUIRED)
add_executable(concatenate_pcd concatenate_pcd.cpp)
target_link_libraries(concatenate_pcd ${PCL_LIBRARIES})
- 结果