一凡 发自 副驾寺
智能车参考 | 公众号 AI4Auto
激光雷达,确实很难。
全球第一大汽车供应链大厂博世,最近发言人明确证实,公司将放弃自研激光雷达。
博世2020年就启动激光雷达研发,此前进行过多项道路测试,而且作为智能驾驶冗余标配硬件,激光雷达已经在今年开启了规模化落地。
所以博世是放弃激光雷达路线了吗?作为全球第一汽车一级供应商,博世当然不是放弃。
发言人也证实了,依然保持对激光雷达赛道的关注,放弃的只是自研,因为激光雷达可能真的太难了。

博世放弃自研激光雷达
今年7月,有消息称知名Tier 1博世将放弃研发激光雷达,在当时并未引起人们广泛关注,毕竟激光雷达在当前汽车智能化浪潮中的地位举足轻重,博世作为知名供应商,不可能放弃角逐未来的关键。

而最近博世发言人向德国媒体证实了这条消息,称公司决定不再投入任何资源来开发激光雷达,转而将资源投入到其他雷达的研发。
从最近其在慕尼黑车展的展品来看,博世的转向已初获成效,新一代雷达传感器在探测距离和分辨率上有所进步,可以有效识别摩托车等窄小的物体。


发言人还对放弃激光雷达研发给出了两点解释:技术复杂性和上市时间。
着眼当下,别看激光雷达是个小玩意儿,其实很难“啃”,要投入大量的资金和人力研发。
放眼未来,上市时间还是个问题,目前赛道上仅国内就有禾赛科技、速腾聚创等知名玩家,博世的激光雷达量产后未必能卷的过。

现在不好造,造出来也不一定好卖,所以博世决定终止激光雷达的研发。
不过博世又补充道,内部仍将保留激光雷达相关专业储备,以便于未来评估产品,并根据需要集成到自家的产品中。
放弃不是否定,博世并没有认为激光雷达对自动驾驶不重要了。
从发言人透露的信息来看,博世的决定是自家的无奈,与当前“纯视觉”和融合感知的自动驾驶路线之争并无关系。

博世并没有否定自己入局造激光雷达的初心。
博世研发激光雷达的历程
2020年1月,博世宣布要推出一款专为汽车设计的激光雷达,不过没有公布硬件细节。
博世称此举是“拥抱自动驾驶”,博世相信并行开发视觉方案的摄像头和雷达能最大限度地提高安全性。
但这个时间,起步略晚,拿今年已在美上市并实现盈利的玩家禾赛科技来对比,后者2020年都有两款产品正式发布了,而且走的还是车规和机器人两条赛道。

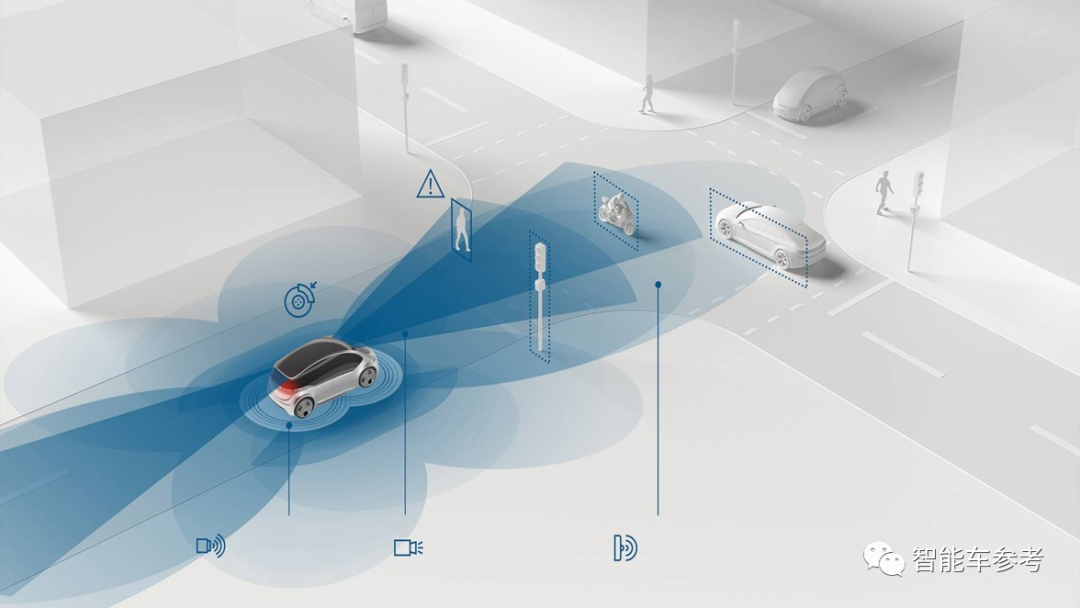
根据德国媒体报道,此前博世已在高速和城市道路进行过多项自动驾驶用例测试,在测试中进一步肯定了激光雷达的优越性。
比如当摩托车在十字路口高速接近汽车时,激光雷达能更可靠地检测这种具有狭窄轮廓的物体。而且不会像摄像机那样被不利的光线遮蔽。

经过三年半的努力,博世综合当前研发情况和未来市场表现,最终放弃了激光雷达这块“难啃的骨头”。
一边是博世等巨头在研发激光雷达上遭遇不顺,一边是禾赛科技、速腾聚创等玩家在赛道上风生水起。
连那个“遥遥领先”的男人也在公开场合被镭神智能董事长胡小波“劝退”:
我想劝余总,华为别做激光雷达了,他那个玩意儿又做不过我和速腾。

大疆则无声退出了最激烈的量产车竞争,在小鹏P5后再无车规落地进展,甚至小鹏其他车型也都转投了速腾。
所以百年汽车工业大变局,新事物层出不穷,过去无往不利的巨头们也遇上了难搞的课题,无奈转向。
巨头博世放弃研发激光雷达,或许只是产业发展的一个信号:
智能汽车供应链进入洗牌期,分久必合,行业分工重新明确。
—END—高效学习3D视觉三部曲
第一步 加入行业交流群,保持技术的先进性
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。[三维重建方向]NeRF、colmap、OpenMVS等。除了这些,还有求职、硬件选型、视觉产品落地等交流群。大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。

第二步 加入知识星球,问题及时得到解答
针对3D视觉领域的视频课程(三维重建、三维点云、结构光、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业、项目对接为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:「3D视觉从入门到精通」
学习3D视觉核心技术,扫描查看,3天内无条件退款
第三步 系统学习3D视觉,对模块知识体系,深刻理解并运行
如果大家对3D视觉某一个细分方向想系统学习[从理论、代码到实战],推荐3D视觉精品课程学习网址:www.3dcver.com
科研论文写作:
基础课程:
[1]面向三维视觉算法的C++重要模块精讲:从零基础入门到进阶
[2]面向三维视觉的Linux嵌入式系统教程[理论+代码+实战]
工业3D视觉方向课程:
[1](第二期)从零搭建一套结构光3D重建系统[理论+源码+实践]
SLAM方向课程:
[1]深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
[1]彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
[2](第二期)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
[3]彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
[4]彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
视觉三维重建
[1]彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进)
自动驾驶方向课程:
[1] 深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
[2] 国内首个面向自动驾驶目标检测领域的Transformer原理与实战课程
[4]面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
[5]如何将深度学习模型部署到实际工程中?(分类+检测+分割)