- 背景
再硬件开发的过程中需要对一些个信号进行分析,总会想到使用示波器逻辑分析仪等工具。 方法
1、安装keil mdk
2、下载工具
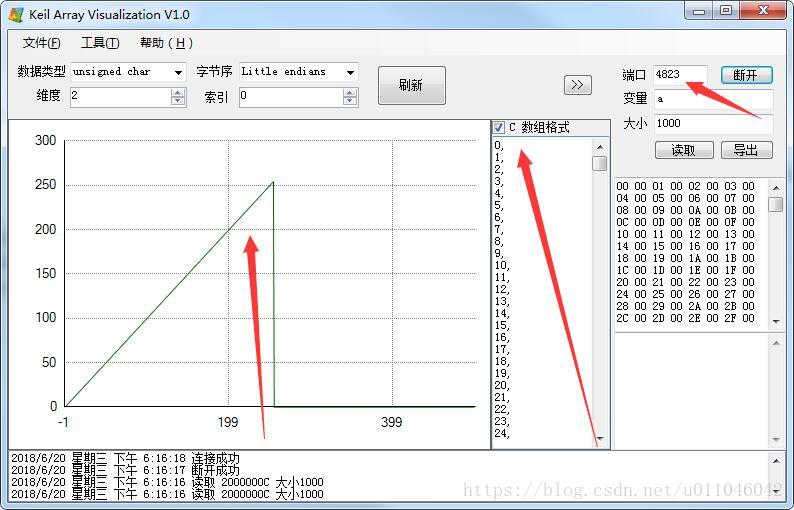
Keil Array Visualization V1.0
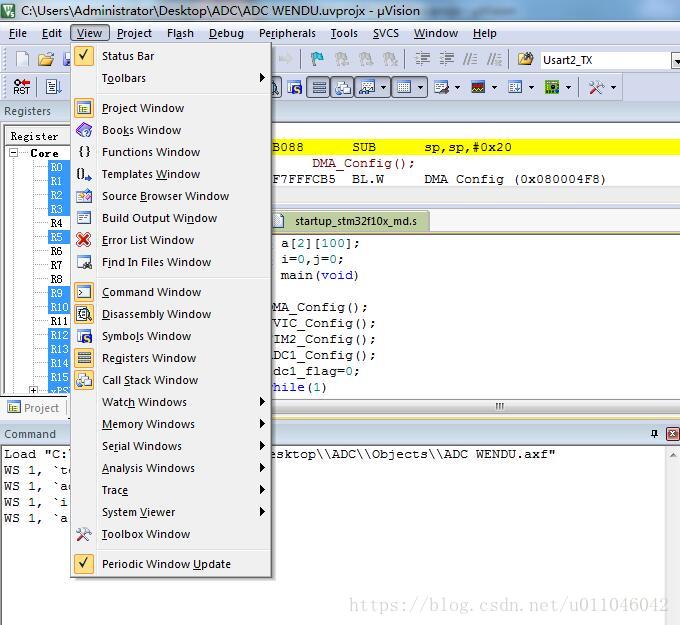
3、打开相关的选项
打开update选选项
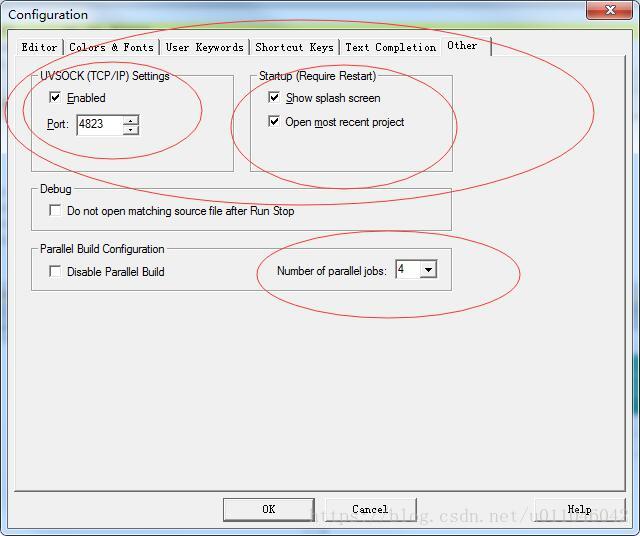
打开TCP端口号相关的选项实例与运行效果
1、代码:

#include "stm32f10x.h"
#define ADC1_DR_Address ((uint32_t)0x4001244c)
void DMA_Config(void);
void NVIC_Config(void);
void TIM2_Config(void);
void ADC1_Config(void);
volatile unsigned char adc1_flag;
volatile unsigned short adc1_value=0xAAA;
volatile float temperature=1.0;
void NVIC_Config(void)
{
NVIC_InitTypeDef n;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
n.NVIC_IRQChannel=TIM2_IRQn;
n.NVIC_IRQChannelPreemptionPriority=0;
n.NVIC_IRQChannelSubPriority=1;
n.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&n);
}
void TIM2_Config(void)
{
TIM_TimeBaseInitTypeDef t;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);
t.TIM_Prescaler=36000-1;
t.TIM_Period=1000-1;
t.TIM_ClockDivision=0;
t.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM2,&t);
TIM_ClearFlag(TIM2,TIM_FLAG_Update);
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
TIM_Cmd(TIM2,ENABLE);
}
void ADC1_Config(void)
{
ADC_InitTypeDef a;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1,ENABLE);
RCC_ADCCLKConfig( RCC_PCLK2_Div6);
ADC_DeInit(ADC1);
a.ADC_Mode=ADC_Mode_Independent;
a.ADC_ScanConvMode=ENABLE;
a.ADC_ContinuousConvMode=ENABLE;
a.ADC_NbrOfChannel=1;
a.ADC_ExternalTrigConv=ADC_ExternalTrigConv_None;
a.ADC_DataAlign=ADC_DataAlign_Right;
ADC_Init(ADC1,&a);
ADC_RegularChannelConfig(ADC1,ADC_Channel_16,1,ADC_SampleTime_71Cycles5);
ADC_TempSensorVrefintCmd(ENABLE);
ADC_DMACmd(ADC1,ENABLE);
ADC_Cmd(ADC1,ENABLE);
ADC_ResetCalibration(ADC1);
while(ADC_GetResetCalibrationStatus(ADC1));
ADC_StartCalibration(ADC1);
while(ADC_GetCalibrationStatus(ADC1));
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
}
void DMA_Config(void)
{
DMA_InitTypeDef d;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1,ENABLE);
DMA_DeInit(DMA1_Channel1);
d.DMA_PeripheralBaseAddr=ADC1_DR_Address;
d.DMA_MemoryBaseAddr=(unsigned int)&adc1_value;
d.DMA_DIR=DMA_DIR_PeripheralSRC;
d.DMA_BufferSize=1;
d.DMA_PeripheralInc=DMA_PeripheralInc_Disable;
d.DMA_MemoryInc=DMA_MemoryInc_Disable;
d.DMA_PeripheralDataSize=DMA_PeripheralDataSize_HalfWord;
d.DMA_MemoryDataSize=DMA_MemoryDataSize_HalfWord;
d.DMA_Mode=DMA_Mode_Circular;
d.DMA_Priority=DMA_Priority_High;
d.DMA_M2M=DMA_M2M_Disable;
DMA_Init(DMA1_Channel1,&d);
DMA_Cmd(DMA1_Channel1,ENABLE);
}
void TIM2_IRQHandler()
{
if (TIM_GetITStatus(TIM2,TIM_IT_Update)!=RESET)
{
adc1_flag=1;
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
}
void delay_us(u32 nTimer)
{
u32 i=0;
for(i=0;i<nTimer;i++){
__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();
__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();
__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();
__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();
__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();__NOP();
}
}
void delay_ms(u32 nTimer)
{
u32 i=1000*nTimer;
delay_us(i);
}
u16 a[2][100];
u16 i=0,j=0;
int main(void)
{
DMA_Config();
NVIC_Config();
TIM2_Config();
ADC1_Config();
adc1_flag=0;
while(1)
{
i++;
a[0][i]=i;
delay_ms(10);
if(i==254)
{
i=0;
}
temperature=(1.43-(float)adc1_value*3.3/4096)*1000/4.3+25;
adc1_flag=0;
}
}
2、编译运行
在示波器上看到的如下: