文章目录
前言
HereFlow 光流量传感器(HereFlow optical flow sensor)是一种轻型光流量传感器,包括一个短程激光雷达,使用 CAN 协议与自动驾驶仪通信。这可用于改进水平位置控制,尤其是在没有 GPS 的环境中。
!Warning
HereFlow 附带的激光雷达距离很短,尤其是在室外。我们强烈建议使用距离更远的激光雷达(longer range lidar instead)。
25.3.1 在哪里购买
传感器可从 Hex 经销商(Hex resellers)处购买。
25.3.2 与自动驾驶仪连接
光流量传感器应安装在旋翼飞机底部,相机镜头朝下。传感器带镜头的一侧应朝向飞行器前方。
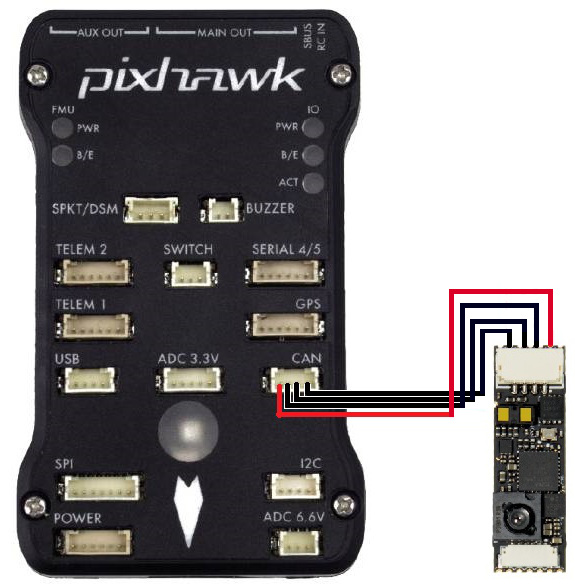
将传感器连接到自动驾驶仪的 CAN 端口(如果使用 Cube,请注意 2019年4月之前的电路板将 CAN1 和 CAN2 互换)。
设置 FLOW_TYPE = 6(DroneCAN)。
设置 CAN_P1_DRIVER = 1 以启用 DroneCAN。
设置 CAN_D1_PROTOCOL = 1 (DroneCAN)。
使用机载激光雷达(不推荐):
设置 RNGFND1_TYPE = 24(DroneCAN)。
设置 RNGFND1_MAX_CM = 300,将测距仪的最大测距范围设置为 3m。
25.3.3 附加说明
与 PX4Flow 传感器(PX4Flow sensor)一样,使用该传感器的自主模式(包括 Loiter 和 RTL)也需要测距仪。
FlowHold 不需要使用测距仪。
可以通过设置传感器位置参数(sensors position parameters)来提高性能。例如,如果传感器安装在框架旋转中心向前 2cm、向下 5cm 的位置,则将 FLOW_POS_X 设置为 0.02,将 FLOW_POS_Z 设置为 0.05。
25.3.4 测试和设置
参见光学流量传感器测试和设置(Optical Flow Sensor Testing and Setup)。
25.3.5 参数说明
1、FLOW_TYPE:光学流量传感器类型
注意:更改后需要重新启动。
| Values |
||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
2、CAN_P1_DRIVER:与物理 CAN 接口一起使用的虚拟驱动程序索引
注意:更改后需要重新启动。
启用该选项可使用 CAN 总线。
| Values |
||||||||||
|---|---|---|---|---|---|---|---|---|---|---|
|
3、CAN_D1_PROTOCOL:在虚拟驱动程序上启用特定协议
注意:该参数适用于高级用户。
注意:更改后需要重启。
启用该选项可启动将使用该虚拟驱动程序的选定协议。
| Values |
||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
4、RNGFND1_TYPE:测距仪类型
连接测距仪的类型。
| Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
5、RNGFND1_MAX_CM:测距仪最大距离
测距仪能可靠读取的最大距离(厘米)。
| Increment |
Units |
|---|---|
| 1 |
centimeters |